 人形機器人之關鍵觸覺傳感器:剛性到柔性
人形機器人之關鍵觸覺傳感器:剛性到柔性
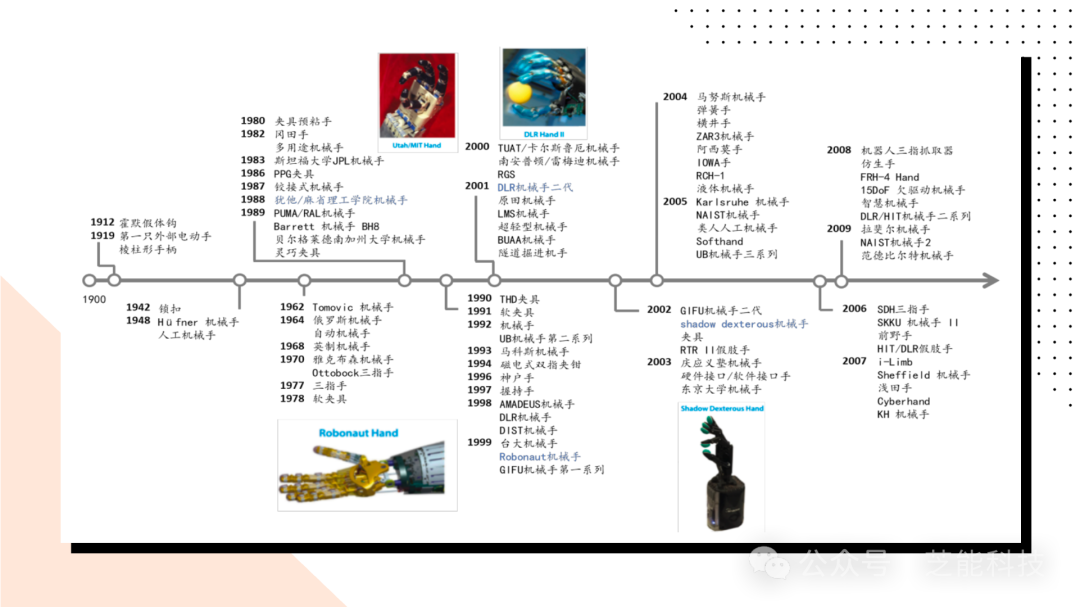
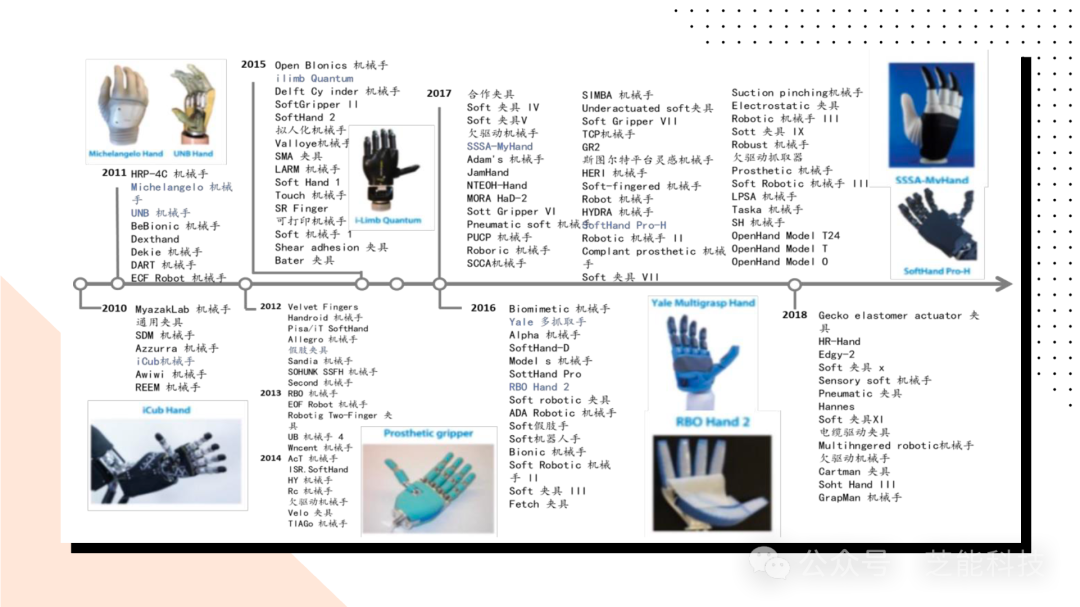
機器人領域中,靈巧手的觸覺傳感器成為抓握的核心元件,感知技術演進經歷了數十年,從剛性感知路線逐漸發展為柔性、高靈敏、高陣列的方向。
●觸覺是人類皮膚的一項關鍵功能,通過物理接觸實現與周圍環境的互動。觸覺感受器通常基于觸摸/壓力檢測,實現對外部刺激的反應,如壓力、彎曲、拉伸和溫度變化,從而識別接觸的物體。
●觸覺傳感器是用于機器人中模仿觸覺功能的傳感器。其基本原理是通過向一個觸覺陣列施加壓力,產生電流,并通過更高層的算法實現軟硬件的協同反應,從而實現觸覺操作的反饋,以及輸入和輸出。
觸覺傳感器是機器人進化的核心需要解決的問題,芝能科技將帶你逐步了解觸覺傳感器的技術原理、技術路線、發展趨勢,讓你更了解智能AI機器人技術迭代。
Part 1技術原理和關鍵指標
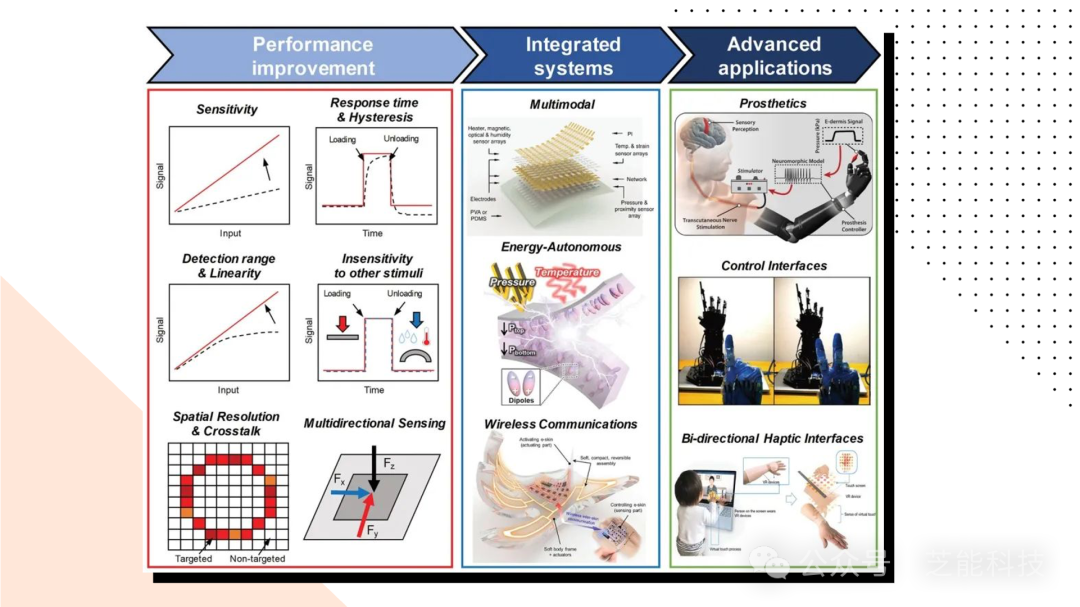
觸覺傳感器的基本原理是將外部壓力轉化為電信號,以估算和測量力和剪切力。這其中,關鍵的技術指標包括空間分辨率、力敏感性、減少零漂和邊緣層盲區檢測,以及優化處理數據的能力。觸覺傳感器需要考慮多個性能參數,包括靈敏度、探測范圍、線性度、響應時間和空間分辨率。這些性能要求高度依賴于目標應用程序。
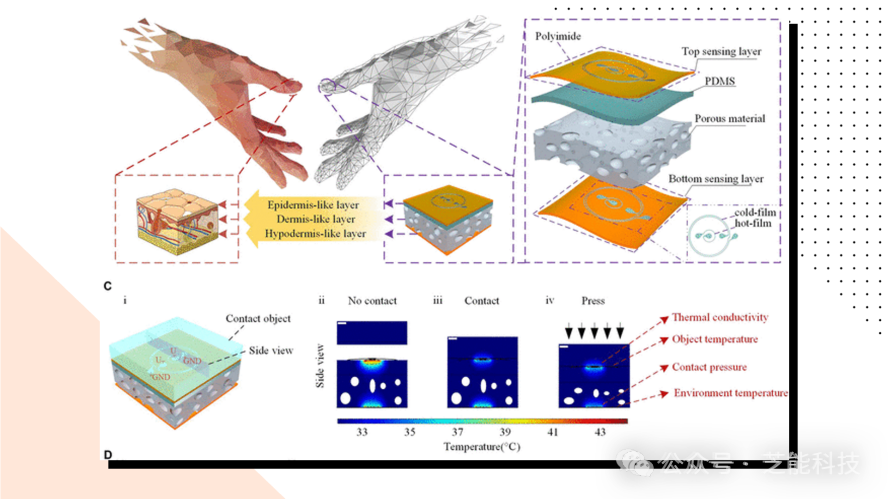
觸覺傳感器的傳導原理可以參考人體皮膚的壓力感應特性:
●靈敏度:是觸覺傳感器的關鍵參數之一,與檢測極限和施加壓力之間的微小差異有關。提高靈敏度的策略包括微結構工程和傳感材料接觸的顯著變化。
●探測范圍和線性度:觸覺傳感器的探測范圍依賴于應用需求,需要在大范圍的壓力下實現高靈敏度。線性度表示信號相對于施加的刺激的比例,高線性度有利于信號處理和校準。
●響應時間與遲滯:響應時間決定了傳感器響應外部刺激獲得穩定輸出信號的時間,而遲滯則決定了施加和釋放壓力時輸出信號的一致性。這兩者在實時動態應用中至關重要。
●空間分辨率與串擾:觸覺傳感器陣列的空間分辨率決定了是否能夠識別或操縱復雜觸覺信息。挑戰之一是減少來自相鄰單元的信號干擾,即串擾。
Part 2技術路線:多種技術的演變
機器人觸覺傳感器的技術路線已經衍生出多種類型,其中電阻式、電容式、壓電式、光學式、流體式等成為主流。這些傳感器在原理上各有千秋,但都致力于將外部施加的力轉化為電阻或電容的變化,實現對力和剪切力的測量。光學式傳感器具有較高的空間分辨率和較寬的動態響應范圍,而流體式方案如BioTac通過柔性橡膠皮和離子導電流體實現對法向力和剪切力的測量。
Part 3 發展趨勢:多模式和新型傳感器的涌現
近年來,學界和業界開始探索多模式和新型觸覺傳感器,以提升感知性能并降低生產難度。多模式觸覺傳感器融合多種傳感技術,集成電氣接口并優化制造流程,以實現多陣列單芯片。同時,新型傳感器如量子隧道效應傳感器、有機場效應晶體管傳感器、結構聲觸覺傳感器和納米觸覺傳感器等不斷涌現,為觸覺傳感技術的發展帶來新的可能性。
觸覺傳感器主要應用于以下四個方面:
●讓假肢獲得接近真實的觸覺:觸覺傳感器通過模擬皮膚中的神經元傳導信號,實現了假肢對觸覺的模擬,創造出“電子皮膚”。
●力傳感器賦予工業機器人手腕觸覺:可感知機器人和機臺的所有力,為制造業引入工業機器人提供了重要的支持。
●觸覺傳感器應用于仿生機器人:可在嚴苛的工作環境下進行操作,替代人類進行危險或高強度的工作,同時獲取相應的感知數據。
●柔性觸覺傳感器的崛起:近年來,柔性觸覺傳感技術的發展為穿戴設備和可穿戴技術提供了新的可能性,擴大了觸覺傳感器的應用范圍,涉及人機交互系統、智能機器人、移動醫療等領域。
小結
觸覺傳感器技術的進步在機器人領域催生了更靈活、智能的機械手,為特定任務的執行提供了新的可能性。特斯拉的GEN2機器人展示了令人矚目的靈敏動作,為觸覺傳感技術的未來發展提供了新的方向。隨著技術的不斷發展,觸覺傳感器有望成為更多智能系統的重要組成部分,為人機交互提供更為自然和智能的體驗。
-
信號處理
+關注
關注
48文章
1042瀏覽量
103401 -
人形機器人
+關注
關注
3文章
496瀏覽量
16801 -
觸覺傳感器
+關注
關注
4文章
86瀏覽量
9396
原文標題:人形機器人之關鍵觸覺傳感器:剛性到柔性
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設計】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

為什么人形機器人更討人喜歡?
觸覺傳感器為機器人提供了新功能
廈門大學:給機器人穿上靈敏“皮膚”!柔性觸覺傳感器研究有了重要進展
柔性觸覺傳感器或將在人形機器人時代大放異彩
人形機器人柔性觸覺傳感器的關鍵技術分析
全面分析:人形機器人快速發展,哪些國產傳感器將受益?(深度報告)

柔性機器人與剛性機器人區別與聯系







 工商網監
工商網監
評論