") STM32驅(qū)動(dòng)Rd-03D實(shí)現(xiàn)不同角度點(diǎn)亮不同LED燈
STM32驅(qū)動(dòng)Rd-03D實(shí)現(xiàn)不同角度點(diǎn)亮不同LED燈
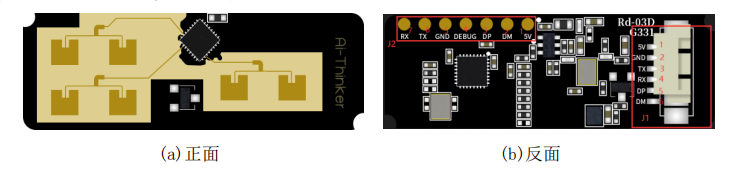
安信可雷達(dá)模組Rd-03D已經(jīng)上市,該雷達(dá)采用一發(fā)兩收的天線,可以實(shí)現(xiàn)目標(biāo)跟蹤,實(shí)現(xiàn)對(duì)區(qū)域內(nèi)目標(biāo)測(cè)距、測(cè)角和測(cè)速。可用于智能控制空調(diào)、風(fēng)扇等家電運(yùn)行、智能馬桶、感應(yīng)燈、臺(tái)燈、鏡子燈、智能調(diào)節(jié)屏幕亮度等各行業(yè)場(chǎng)景中。
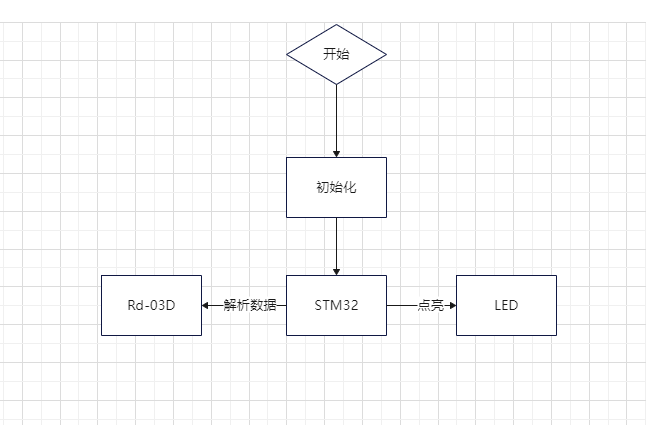
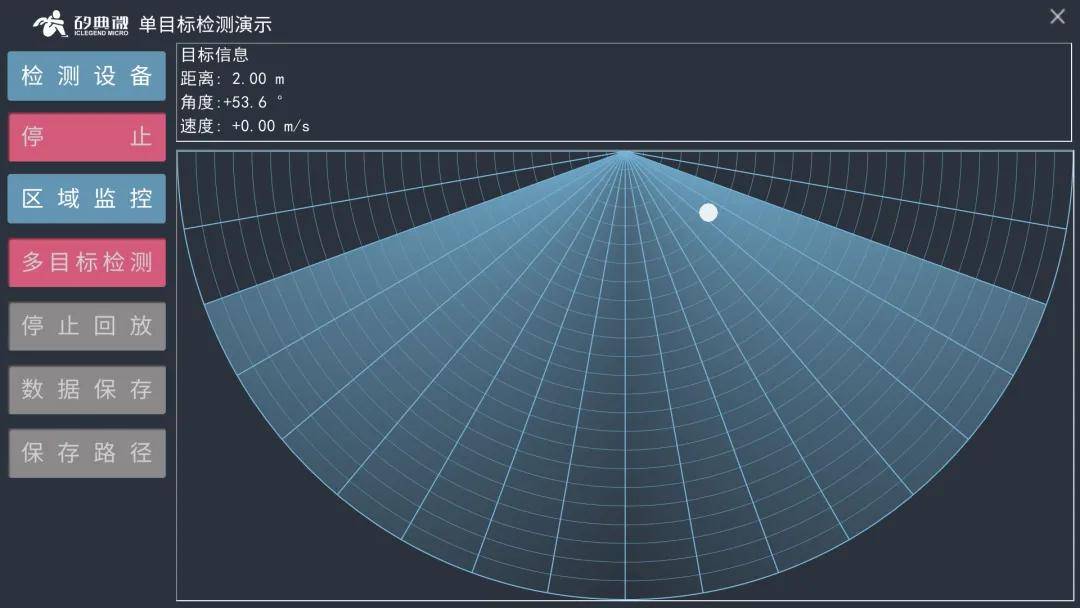
本應(yīng)用示例使用STM32解析Rd-03D的串口數(shù)據(jù),檢測(cè)人體距離雷達(dá)的角度,根據(jù)不同角度點(diǎn)亮不同的燈珠:-60度到-20度點(diǎn)亮 LED1,-20度到20度點(diǎn)亮LED2,20度到60度點(diǎn)亮LED3。
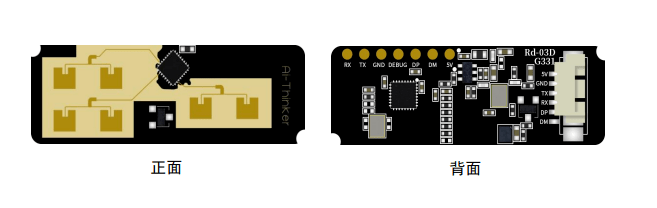
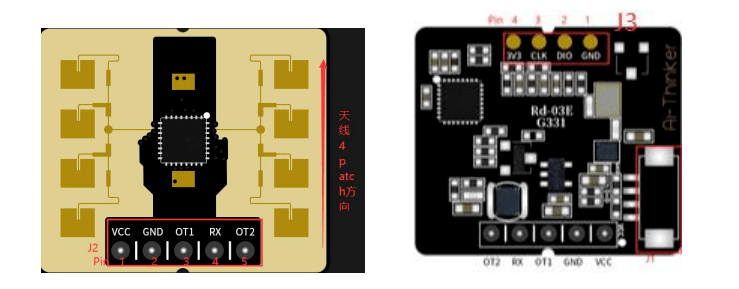
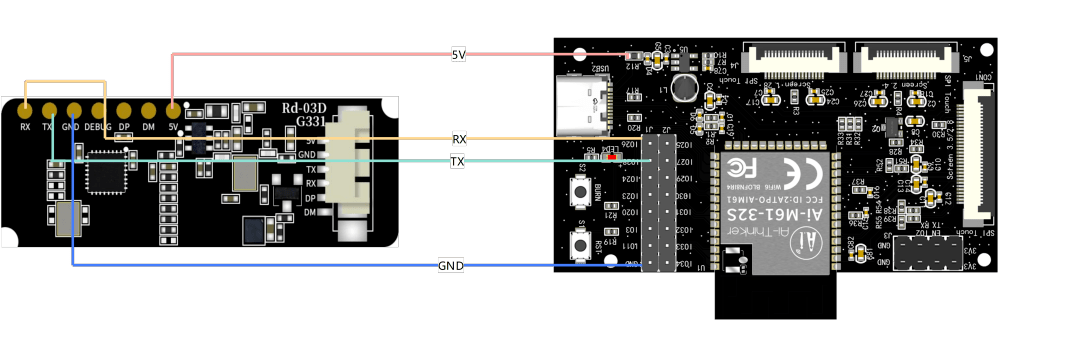
一、Rd-03D引腳說(shuō)明
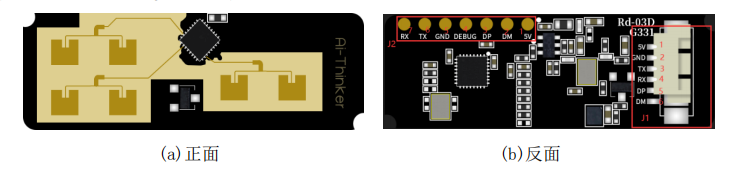
J1引腳說(shuō)明:
| J#PIN# | 名稱 | 功能 | 說(shuō)明 |
| J1PIN1 | 5V | 電源輸入 | 連接串口轉(zhuǎn)接板5V |
| J1PIN2 | GND | 接地 | 連接串口轉(zhuǎn)接板GND |
| J1PIN3 | TX | UART_TX | 連接串口轉(zhuǎn)接板RXD |
| J1PIN4 | RX | UART_RX | 連接串口轉(zhuǎn)接板TXD |
| J1PIN5 | DP | 燒錄數(shù)據(jù)正信號(hào) | 若使用4Pin的連接器,則該引腳未使用 |
| J1PIN6 | DM | 燒錄數(shù)據(jù)負(fù)信號(hào) | 若使用4Pin的連接器,則該引腳未使用 |
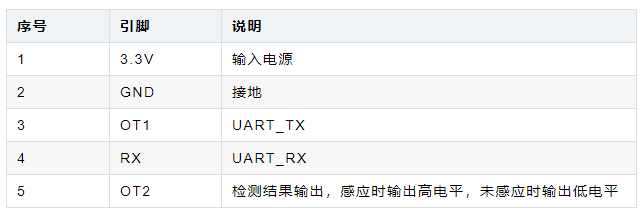
J2引腳說(shuō)明:
| J#PIN# | 名稱 | 功能 | 說(shuō)明 |
| J2PIN1 | 5V | 電源輸入 | 5V |
| J2PIN2 | DM | 燒錄數(shù)據(jù)負(fù)信號(hào) | - |
| J2PIN3 | DP | 燒錄數(shù)據(jù)正信號(hào) | - |
| J2PIN4 | DEBUG | 調(diào)試串口TXD | 用于調(diào)試固件 |
| J2PIN5 | GND | 接地 | - |
| J2PIN6 | TX | UART_TXD | 連接串口轉(zhuǎn)接板RXD |
| J2PIN7 | RX | UART_RXD | 連接串口轉(zhuǎn)接板TXD |
二、軟件設(shè)計(jì)框架
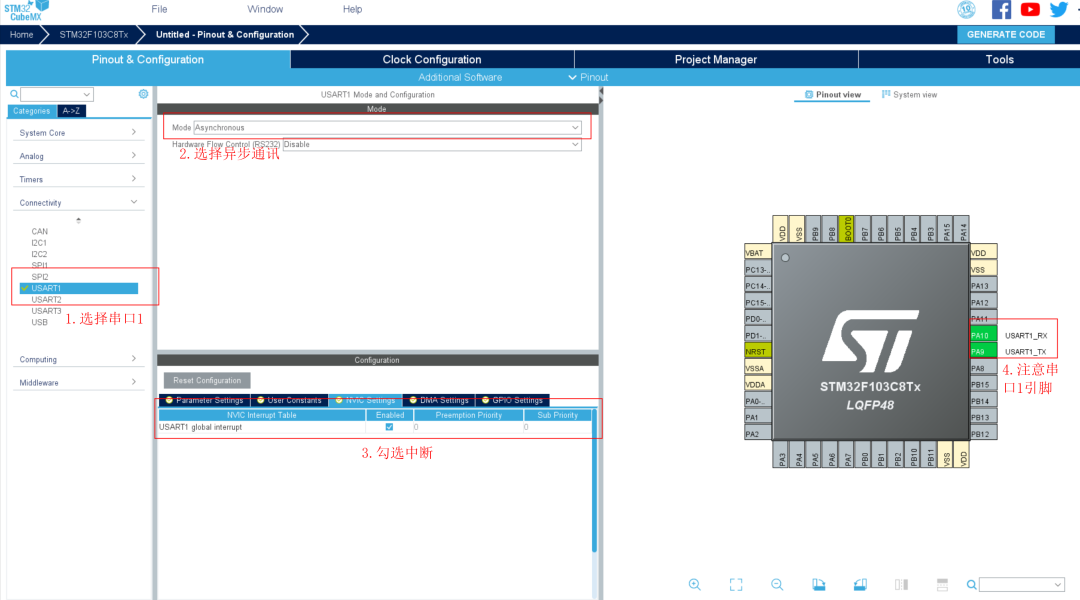
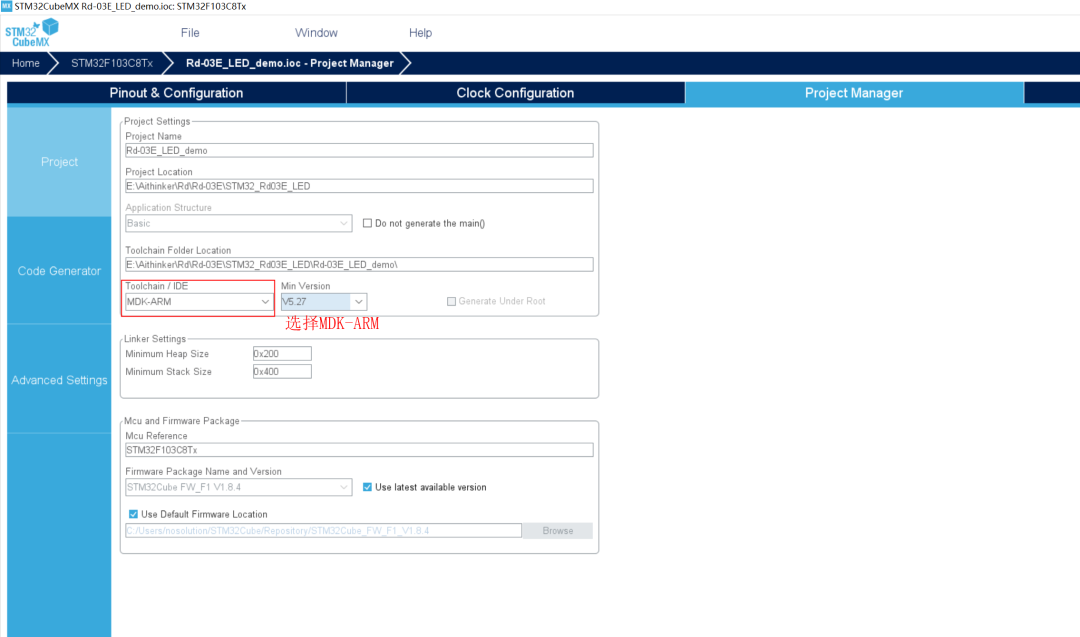
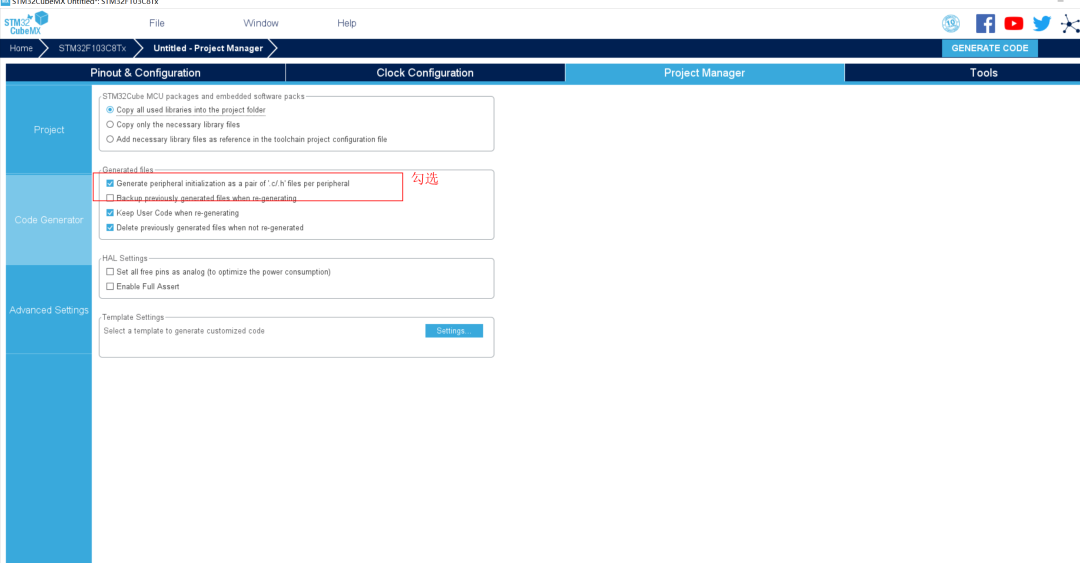
三、STM32F103C8T6使用CubeMX搭配HAL庫(kù)配置
打開(kāi)CubeMX,選擇STM32F103C8T6。
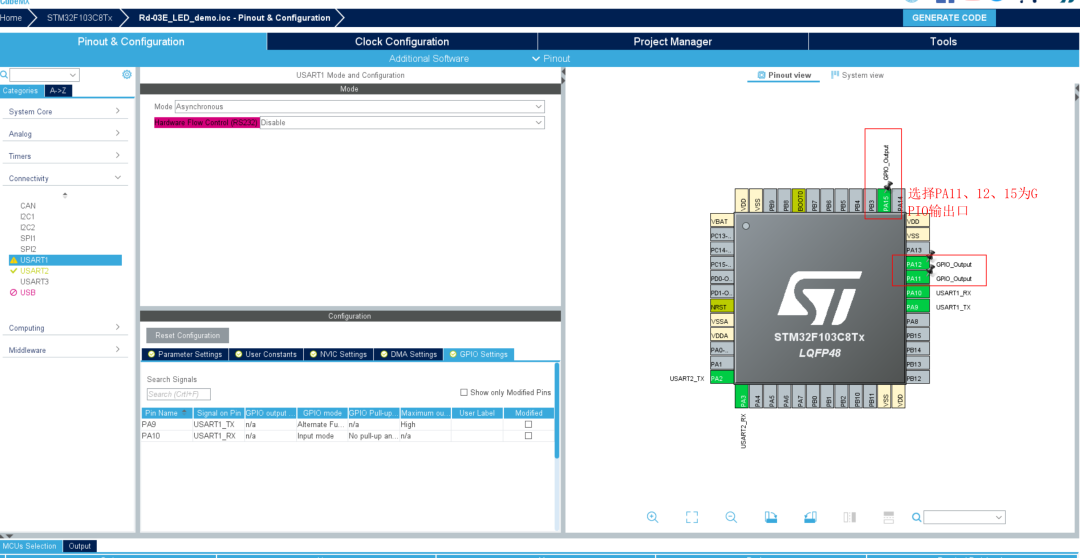
選擇兩個(gè)串口,分別是串口1和串口2,PA9為USART1_TX,PA10為USART1_RX,PA2為USART2_TX,PA3為USART_RX。
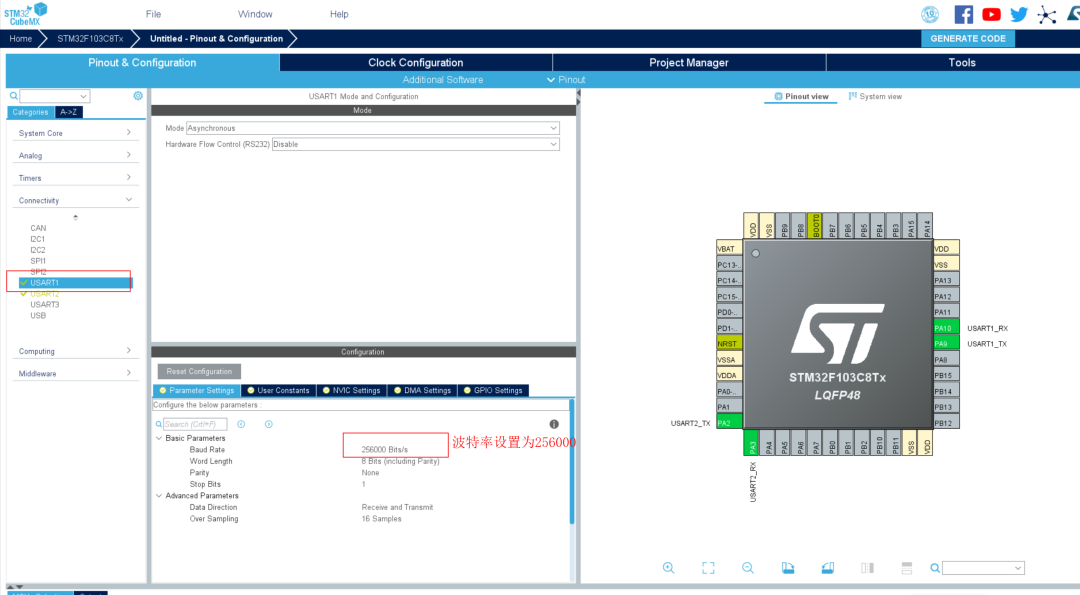
選擇異步通訊,勾選中斷,注意:串口1的波特率為256000,串口2波特率為115200。
設(shè)置GPIO口
四、STM32與Rd-03D和LED燈的接線
| Rd-03D | STM32 | LED | ||
| 5V | — — | 5V | — — | |
| GND | — — | GND | — — | LED123 負(fù)極 |
| TX | — — | PA10 | ||
| RX | — — | PA9 | ||
| PA11 | — — | LED1正極 | ||
| PA12 | — — | LED2正極 | ||
| PA15 | — — | LED2正極 |
五、串口數(shù)據(jù)處理
Rd-03D的串口數(shù)據(jù)
Rd-03D模組通過(guò)串口(TTL電平)與外界通信,雷達(dá)串口默認(rèn)波特率為256000,1停止位,無(wú)奇偶校驗(yàn)位。雷達(dá)輸出檢測(cè)到的目標(biāo)信息,包括在區(qū)域中的x坐標(biāo),y坐標(biāo),以及目標(biāo)的速度值(小端模式)。
上報(bào)是數(shù)據(jù)幀格式:
| 幀頭部 | 幀內(nèi)數(shù)據(jù) | 幀尾部 |
| AA FF 03 00 | 目標(biāo)1信息 目標(biāo)2信息 目標(biāo)3信息 | 55 CC |
數(shù)據(jù)示例:AA FF 03 00 0E 03 B1 86 10 00 68 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 55 CC
紅色部分表示目標(biāo)1的信息,藍(lán)色表示目標(biāo)2的信息,綠色表示目標(biāo)3的信息。
本示例展示解析單目標(biāo)模式下對(duì)角度信息進(jìn)行解析,所以需對(duì)單個(gè)目標(biāo)內(nèi)的數(shù)據(jù)進(jìn)行解析(即目標(biāo)1),其中單個(gè)目標(biāo)具體包含內(nèi)容如下:
| 目標(biāo) x 坐標(biāo) | 目標(biāo) y 坐標(biāo) | 目標(biāo)速度 | 像素距離值 |
| signed int16類型;最高位1對(duì)應(yīng)正坐標(biāo),0對(duì)應(yīng)負(fù)坐標(biāo);其余15位代表x坐標(biāo)絕對(duì)值,單位mm | signed int16類型;最高位1對(duì)應(yīng)正坐標(biāo),0對(duì)應(yīng)負(fù)坐標(biāo);其余15位代表y坐標(biāo)絕對(duì)值,單位mm | signed int16類型;最高位1對(duì)應(yīng)正向速度,0對(duì)應(yīng)負(fù)向速度;其余15位代表速度絕對(duì)值,單位cm/s | Uint16類型;單個(gè)像素距離值,單位mm。 |
根據(jù)目標(biāo)X,Y坐標(biāo)數(shù)據(jù)幀說(shuō)明可知,若像上述數(shù)據(jù)示例,模組將目標(biāo)1的角度數(shù)據(jù)轉(zhuǎn)換為相關(guān)坐標(biāo)信息的過(guò)程展示如下:
目標(biāo)1x坐標(biāo):OxOE+Ox03*256= 782
0-782= -782 mm
目標(biāo)1y坐標(biāo):OxB1+Ox86*256 = 34481
34481-2^15= 1713 mm
六、STM32數(shù)據(jù)處理
角度計(jì)算過(guò)程運(yùn)用到了三角函數(shù)知識(shí),求對(duì)邊比鄰邊(即x/y)tan(θ)角度,如圖:
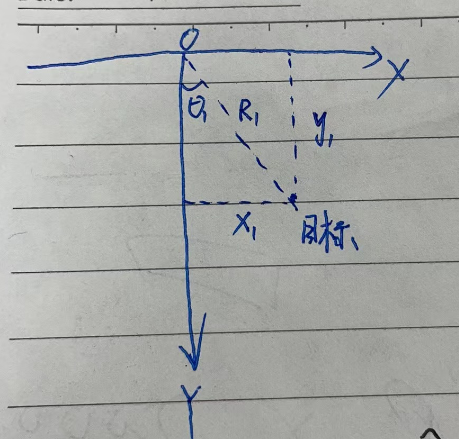
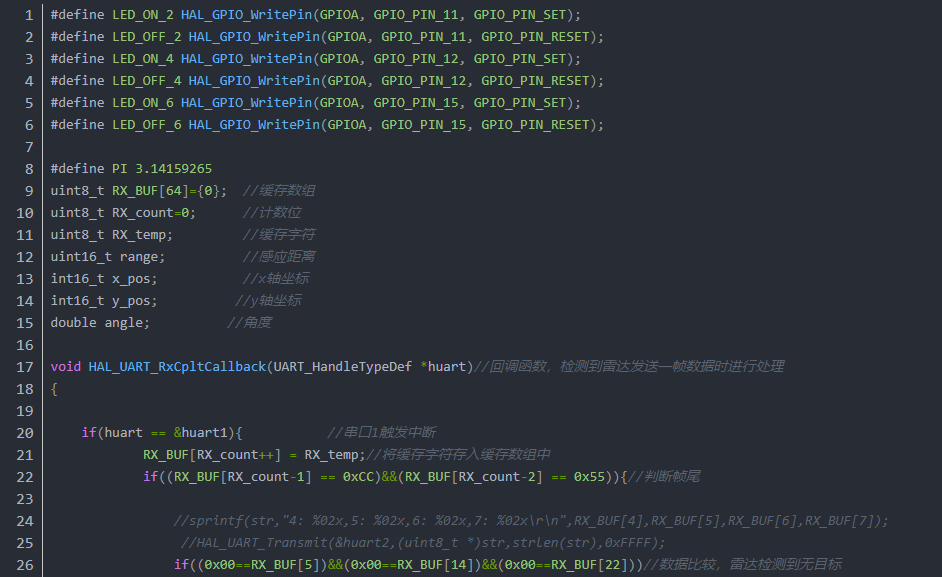
具體實(shí)現(xiàn)代碼(部分截圖,詳情請(qǐng)點(diǎn)擊“閱讀原文”查看原貼)
審核編輯:湯梓紅
-
led燈
+關(guān)注
關(guān)注
22文章
1592瀏覽量
108407 -
STM32
+關(guān)注
關(guān)注
2272文章
10923瀏覽量
357554 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
2966瀏覽量
118011 -
安信可
+關(guān)注
關(guān)注
0文章
159瀏覽量
4046
原文標(biāo)題:STM32驅(qū)動(dòng)Rd-03D,實(shí)現(xiàn)不同角度點(diǎn)亮不同LED燈
文章出處:【微信號(hào):安信可科技,微信公眾號(hào):安信可科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
點(diǎn)亮STM32、FPGA和Liunx板子的LED燈
安信可新品雷達(dá)模組Rd-03搭配STM32制作簡(jiǎn)易人體感應(yīng)雷達(dá)燈教程
使用STM32解析Rd-03D的串口數(shù)據(jù)

STM32 Keil下編程實(shí)現(xiàn)LED燈點(diǎn)亮與閃爍

STM32F03寄存器方式點(diǎn)亮LED流水燈
RD8Tx 51單片機(jī)驅(qū)動(dòng)LED燈

基于安信可Rd-03+STM32制作人體檢測(cè)雷達(dá)燈

關(guān)于Rd-03D雷達(dá)模組產(chǎn)品概述

多人軌跡怎么識(shí)別?安信可Rd-03D雷達(dá)模組能做到!
安信可新款雷達(dá)模組Rd-03E精準(zhǔn)測(cè)距效果
使用小安派-DSL-3.5寸開(kāi)發(fā)的Rd-03D雷達(dá)檢測(cè)站

AiPi-Radar-Monitor 雷達(dá)檢測(cè)站(Rd-03D)
STM32驅(qū)動(dòng)安信可Rd-03D,實(shí)現(xiàn)不同角度點(diǎn)亮不同LED燈
基于STM32+Rd-03D做個(gè)智能人體跟隨旋轉(zhuǎn)臺(tái)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論