") 4D毫米波成像雷達(dá)的測試要求都有哪些嗯?
4D毫米波成像雷達(dá)的測試要求都有哪些嗯?
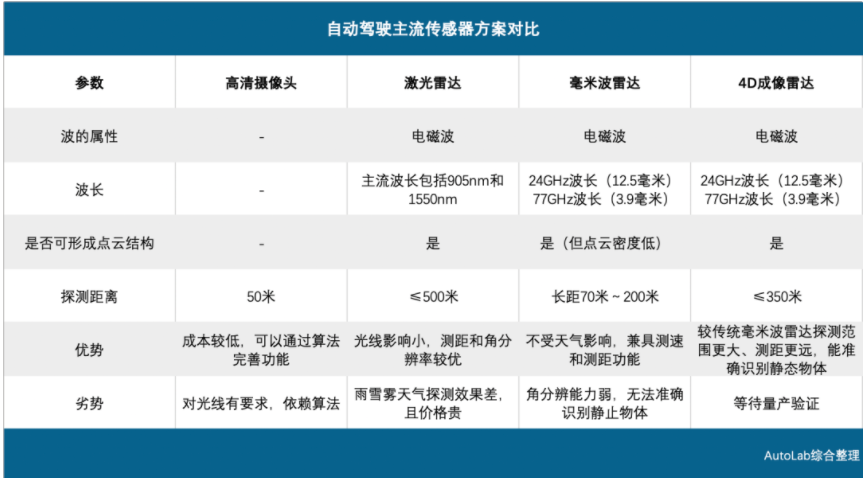
毫米波雷達(dá)在智能駕駛起到什么作用,這個(gè)在純視覺的方案的替代下,引發(fā)了我們的思考。4D毫米波成像雷達(dá),可以說在原有的毫米波雷達(dá)技術(shù),有了更好的可能性,更好地實(shí)現(xiàn)智能駕駛功能,本文還是圍繞一些測試的要求來跟大家分享一下。
01
毫米波雷達(dá)的布置、測試和思考
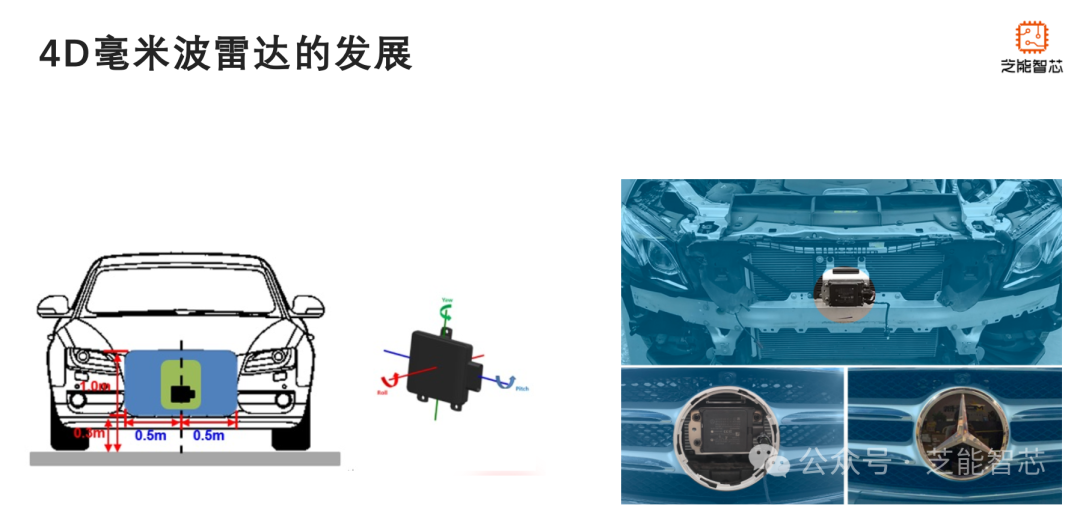
為了智能駕駛功能的準(zhǔn)確性和可靠性,毫米波雷達(dá)的視場(FOV)需要覆蓋盡量大的范圍。一個(gè)最完備的五雷達(dá)布置方案包括一個(gè)前向雷達(dá)和四個(gè)角雷達(dá)。這種布局確保了車輛在不同方向上都能獲得準(zhǔn)確的環(huán)境信息,從而更好地應(yīng)對復(fù)雜的交通場景。
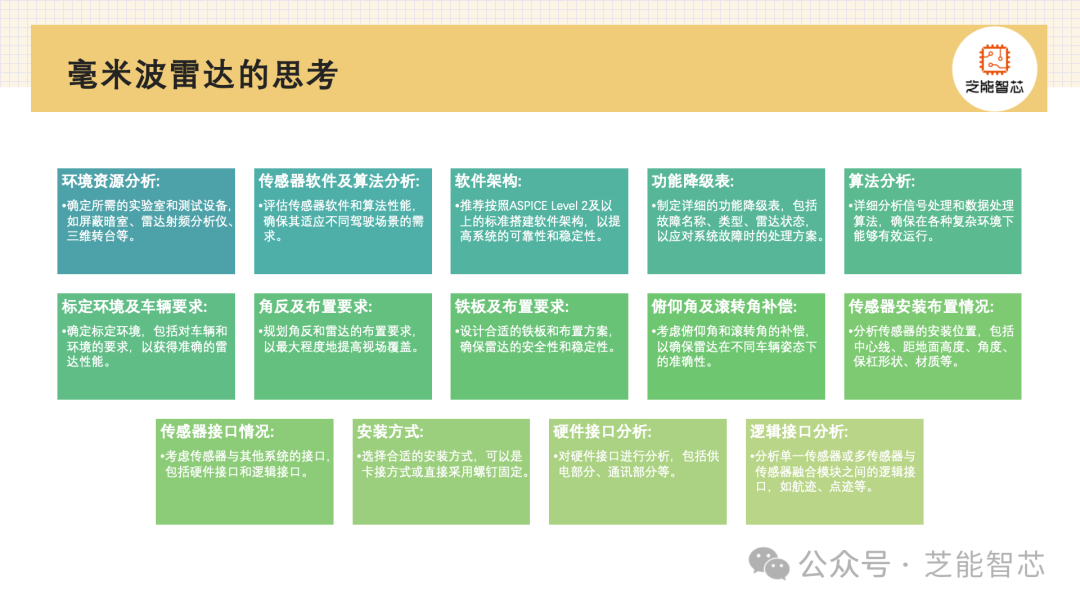
在毫米波雷達(dá)的設(shè)計(jì)中,需要對環(huán)境資源進(jìn)行充分分析,包括傳感器軟件及算法分析。采用ASPICE Level 2及以上的軟件架構(gòu)有助于提高系統(tǒng)的可靠性和穩(wěn)定性。功能降級表則是在出現(xiàn)故障時(shí)對雷達(dá)狀態(tài)進(jìn)行分類和處理的重要依據(jù)。傳感器的安裝位置分析包括中心線、距地面高度、角度、保杠形狀和材質(zhì)等因素。安裝方式可以選擇卡接方式或者螺釘固定。硬件接口分析涵蓋供電部分和通訊部分,邏輯接口分析則關(guān)注傳感器與其他模塊之間的信息傳遞。
4D毫米波成像雷達(dá)的性能評估是關(guān)鍵的一環(huán)。測試實(shí)驗(yàn)室通常包括屏蔽暗室、雷達(dá)射頻分析儀和三維轉(zhuǎn)臺(tái)等設(shè)備,以進(jìn)行測距、測速、測方位角和測俯仰角等功能的測試。通過實(shí)驗(yàn)室測試,可以快速驗(yàn)證毫米波雷達(dá)的性能,降低實(shí)車測試與驗(yàn)證的成本。第三方檢測機(jī)構(gòu)根據(jù)相關(guān)標(biāo)準(zhǔn)進(jìn)行產(chǎn)品評估。雖然2022年全國汽車標(biāo)準(zhǔn)化技術(shù)委員會(huì)頒布了《車載毫米波雷達(dá)性能要求及試驗(yàn)方法》等標(biāo)準(zhǔn),但尚未專門為4D毫米波成像雷達(dá)形成標(biāo)準(zhǔn),因此仍參照現(xiàn)有標(biāo)準(zhǔn)進(jìn)行測試。
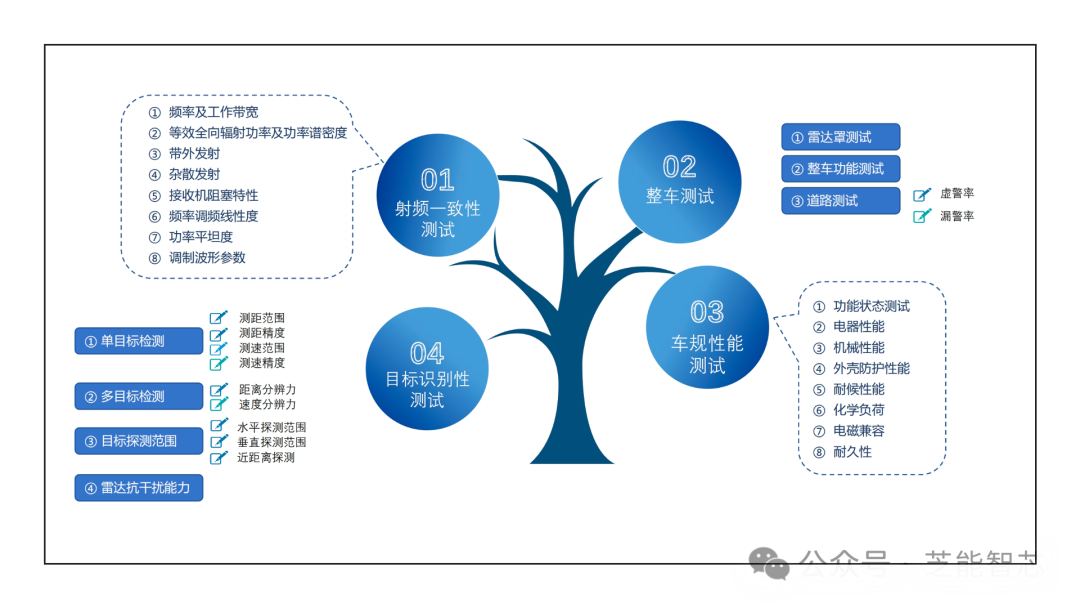
對雷達(dá)零部件進(jìn)行測試驗(yàn)證是確保整個(gè)系統(tǒng)正常運(yùn)行的關(guān)鍵。包括天線性能測試、射頻性能測試、目標(biāo)識別性能測試、抗干擾性能測試、車規(guī)環(huán)境適應(yīng)性測試以及雷達(dá)罩性能測試等多個(gè)方面,都是評估雷達(dá)質(zhì)量的重要指標(biāo)。
通過以上的各項(xiàng)測試,車企和技術(shù)開發(fā)團(tuán)隊(duì)可以全面評估4D毫米波成像雷達(dá)的性能,確保其在各種復(fù)雜道路和氣候條件下能夠穩(wěn)定可靠地工作,為未來的智能汽車提供更安全、更高效的駕駛體驗(yàn)。
02
4D毫米波雷達(dá)整車端測試驗(yàn)證
4D毫米波雷達(dá)的整車端測試驗(yàn)證至關(guān)重要,這既包括實(shí)車場地測試,也包括公開道路測試。以下是對這兩種測試內(nèi)容、方法和一些測試案例的詳細(xì)討論。
1)實(shí)車場地測試
●測試內(nèi)容:
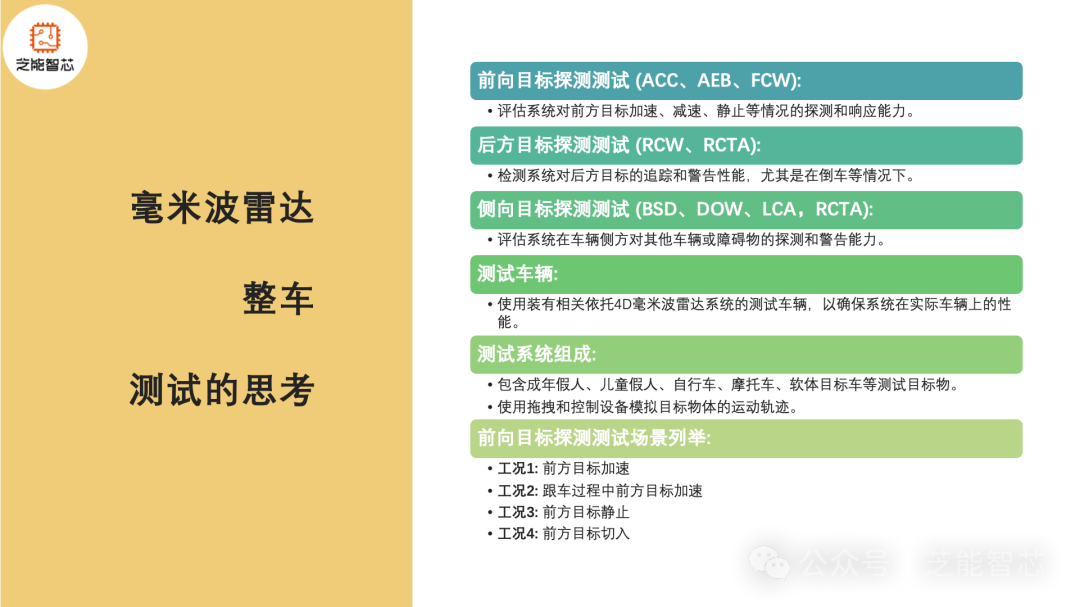
◎前向目標(biāo)探測測試 (ACC、AEB、FCW): 測試系統(tǒng)對前方目標(biāo)的加速、減速、靜止等情況的檢測性能。
◎后方目標(biāo)探測測試 (RCW、RCTA): 對后方目標(biāo)的檢測和追蹤性能。
◎側(cè)向目標(biāo)探測測試 (BSD、DOW、LCA,RCTA): 測試系統(tǒng)在側(cè)方對車輛的探測和跟蹤能力。
●測試方法:
◎測試車輛: 裝有4D毫米波雷達(dá)系統(tǒng)以實(shí)現(xiàn)ADAS功能的測試車輛。
◎測試系統(tǒng)組成: 包含成年假人、兒童假人、自行車、摩托車、軟體目標(biāo)車等測試目標(biāo)物以及拖拽和控制設(shè)備。
●測試案例:
前向目標(biāo)探測測試場景列舉:
◎前方目標(biāo)加速
◎跟車過程中前方目標(biāo)加速
◎前方目標(biāo)靜止
◎前方目標(biāo)切入
2)公開道路測試
●測試內(nèi)容:
◎4D毫米波雷達(dá)在車輛實(shí)際行駛道路、不同天氣狀況下對真實(shí)道路目標(biāo)物的檢測能力: 包括測距、測速、測角等探測性能,目標(biāo)分辨能力、目標(biāo)分類能力、誤報(bào)率、漏檢率、產(chǎn)品耐久性等。
●測試路線及環(huán)境:
◎根據(jù)企業(yè)產(chǎn)品開發(fā)需求、OEM客戶要求等進(jìn)行定義。
◎測試路線設(shè)計(jì)要考慮基本的道路形態(tài)組成,應(yīng)覆蓋高速公路、城市快速、城市道路、城郊道路、國道、省道、停車場、山區(qū)等各類型道路。
◎要求考慮不同天氣、光照條件及地理區(qū)域的覆蓋度,以真實(shí)測試?yán)走_(dá)實(shí)際應(yīng)用的效果。
●測試方法:
◎按照規(guī)劃的測試路線行駛。
◎車輛行駛過程中要在左/中/右三個(gè)車道直行。
◎在左/中/右三個(gè)車道直行后要有向左向右相互變道操作要求。
◎行駛過程中要有加速/減速操作。
小結(jié):涉及安全和功能性來看,車企能夠全面驗(yàn)證4D毫米波雷達(dá)在各種場景下的性能,確保其在實(shí)際駕駛中的可靠性和安全性。這些測試不僅是產(chǎn)品開發(fā)過程中的重要一環(huán),也是對新技術(shù)在真實(shí)環(huán)境中應(yīng)用的有力保證。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2553文章
51390瀏覽量
756586 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2589瀏覽量
48920 -
ADAS系統(tǒng)
+關(guān)注
關(guān)注
4文章
226瀏覽量
25777 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
107文章
1053瀏覽量
64540
原文標(biāo)題:4D毫米波成像雷達(dá)的測試要求
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設(shè)計(jì)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
擁抱自動(dòng)駕駛,4D成像毫米波雷達(dá)已悄然崛起!
4D成像雷達(dá)能否替代毫米波雷達(dá)?
4D成像雷達(dá)專欄 | 4D高分辨毫米波雷達(dá)概述

剖析如何做好一款4D高分辨毫米波雷達(dá)

傲酷雷達(dá)推出商用4D成像毫米波雷達(dá) ST推出汽車衛(wèi)星導(dǎo)航芯片
什么是4D毫米波雷達(dá)?
4D毫米波雷達(dá)加速了4D成像系統(tǒng)的可能性
什么是4D毫米波雷達(dá)?4D毫米波雷達(dá)與傳統(tǒng)雷達(dá)有何區(qū)別?
什么是4D成像毫米波雷達(dá)?4D成像毫米波雷達(dá)作用解析
4D毫米波雷達(dá)市場技術(shù)盤點(diǎn)
經(jīng)緯恒潤新產(chǎn)品系列 | 4D成像毫米波雷達(dá)

對比ZF和特斯拉的4D毫米波雷達(dá)設(shè)計(jì),國產(chǎn)4D毫米波雷達(dá)迅速崛起
國內(nèi)4D毫米波雷達(dá)廠商名錄
經(jīng)緯恒潤4D成像毫米波雷達(dá)亮相 CES 2024





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論