 水下仿生光磁導航技術的發展趨勢探討
水下仿生光磁導航技術的發展趨勢探討
吳新冬1申沖1 曹慧亮1王晨光2唐軍1劉俊1
1.中北大學儀器與電子學院省部共建動態測試技術國家重點實驗室,太原 030051;2.中北大學信息與通信工程學院,太原 030051
【引用格式】吳新冬,申沖,曹慧亮,等.水下仿生光磁導航技術綜述[J].戰術導彈技術,2023(4):13-25.
摘 要針對水下導航資源受限的問題,受動物優異的自主導航能力的啟發,對國內外水下仿生光磁導航技術進行了總結和回顧。從水下偏振光場、生物的地磁導航機理以及生物的光磁復合導航機理入手,介紹了水下仿生偏振光導航、仿生地磁導航以及仿生光磁復合導航的基本原理和研究現狀;通過分析現有仿生導航方法的優勢與限制,主要從提升復雜環境適應性的層面闡述了目前需要解決的關鍵問題;根據目前水下仿生光磁導航的研究現狀,在導航原理、導航精度以及導航范圍三個方面,探討了水下仿生光磁導航技術的發展趨勢,對水下仿生光磁導航技術進行了總結與展望。
關鍵詞磁導航機理;仿生地磁;仿生偏振光;仿生組合導航;光磁復合導航;水下導航;水下偏振光場
1 引 言
近年來,水下導航技術受到了人們的廣泛關注[1-3]。一方面,探測海洋中豐富的資源對導航技術提出了更高的要求;另一方面,水下軍民領域任務如水下搜救、精密測量、環境感知、軍事作戰等,均需依賴于準確可靠的導航技術。當前,已經開發了各種各樣應用于水下任務的導航技術,如水聲定位、全球衛星導航、慣性導航等[4-8]。其中基于水聲定位的導航方式受到海底應答器的制約,只能提供已知區域的導航信息;GPS或北斗等衛星導航技術在水下會受到高電磁損耗的阻礙;而慣性導航的漂移使得在水下航行時不得不利用輔助傳感器定期對其誤差歸零。 在傳統水下導航技術受到限制的條件下,模仿動物的導航能力去實現水下導航為我們提供了全新的思路。由進化篩選出的動物導航系統往往是高效且魯棒的,因為自然界總是傾向于那些能在各類復雜條件下成功存活的個體。 本文從自然界中的光磁信息出發,回顧了仿生偏振光導航、仿生地磁導航和仿生光磁復合導航的發展流程以及當前的研究熱點與關鍵問題,并對未來水下仿生光磁導航的發展趨勢進行了展望。
2 仿生偏振光導航技術
目前普遍認為仿生偏振光導航技術可以追溯到1914年Felix Santschi的螞蟻實驗[9]。他首次發現了生物可以從天空的散射光中獲得指南針信息。在1947年Karl von Frisch的蜜蜂實驗[10]后迎來了偏振導航的研究熱潮。 仿生偏振光導航技術是根據太陽光穿過大氣層時產生的穩定模式而進行導航的技術,具有隱蔽、自主、無累計誤差等優良特性,尤其適用于GPS拒止條件下的導航任務。此外,這種導航技術還有望擴大人類自身的感官知覺,使人類獲得偏振導航感[11]。 當前,仿生偏振光導航傳感器根據信息采集技術的不同,主要可分為基于光電二級管、基于多目相機以及基于焦平面分割等三類[12-16]。導航靈感主要來自于沙蟻、蜜蜂、蜣螂等生物[17-19],并通過模擬生物的正交子眼實現導航信息的獲取,基本流程如圖1所示。導航原理一般基于單散射瑞利模型,需要太陽光在測量之前要經歷一次散射效應,并要求散射粒子小于入射光波長。在這一條件下,光的電矢量方向將垂直于太陽位置、觀測者位置與散射粒子所形成的平面,即電矢量方向 可以利用表示觀測者與太陽位置方向的太陽矢量
可以利用表示觀測者與太陽位置方向的太陽矢量 以及觀測者與散射粒子方向的觀測矢量
以及觀測者與散射粒子方向的觀測矢量 來表示,即:
來表示,即:
 |
(1) |
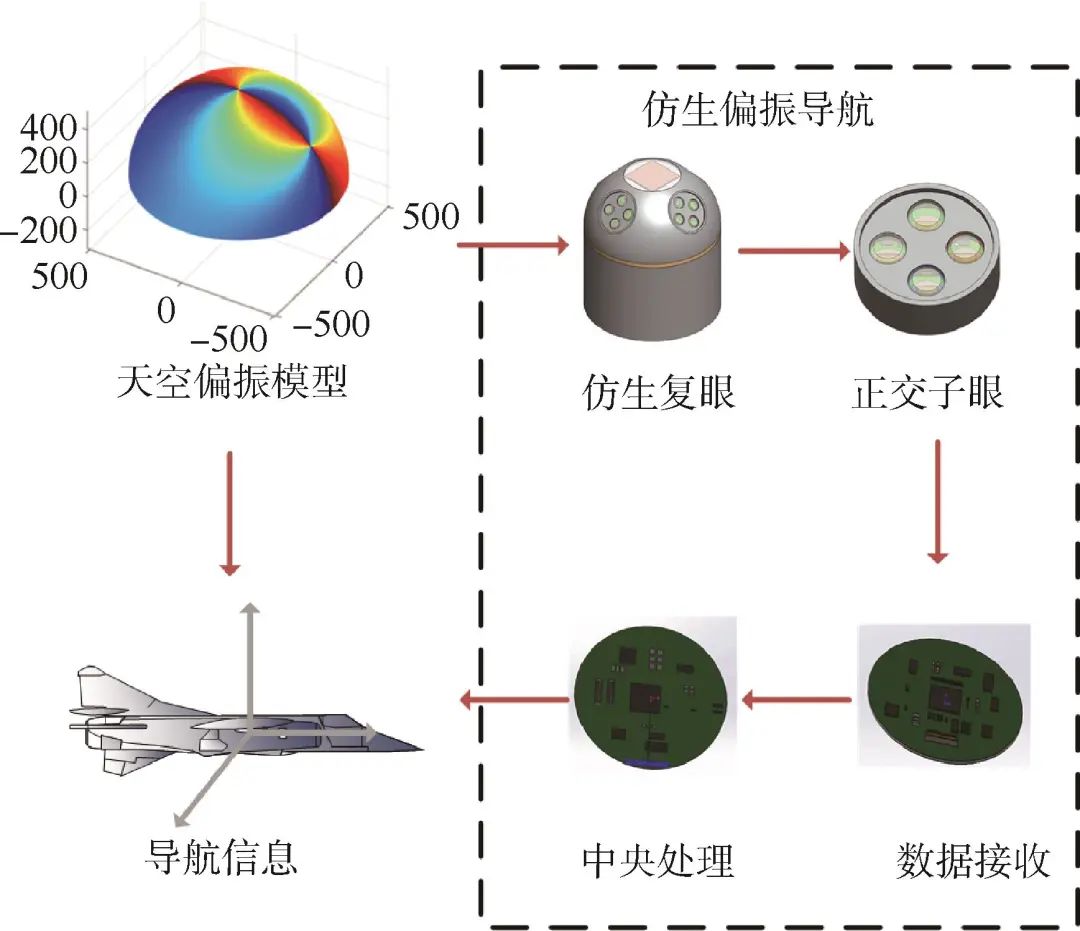
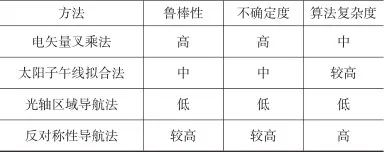
▲圖1仿生偏振導航示意圖▲Fig.1Schematic diagram of biomimetic polarization navigation 目前,各類偏振導航方法基本均在此基礎上展開,并通過測量太陽位置來實現導航,可主要分為電矢量叉乘法、太陽子午線擬合法、光軸(天頂)區域導航法以及反對稱性導航法。 電矢量叉乘法只需要觀測到任意兩個不同觀測位置下的電矢量方向即可實現太陽位置測量,具有最高的魯棒性以及較快的處理速度,但受限于實際散射與單瑞利散射的區別,測量不確定度也會較高。 太陽子午線擬合法需要保證太陽方向區域的可觀測性,在觀測條件理想的情況下,即使只利用最小二乘法進行處理也可以得到較低的測量不確定度。但受限于其對觀測條件的要求,魯棒性較差;處理速度也會隨著擬合方法的不同而發生變化,總體而言,算法復雜度略高于電矢量叉乘法。
光軸區域導航法只利用光軸附近的觀測點,擁有最快的處理速度,但十分容易受到干擾。通常,這類導航方法主要用于高機動且天空無遮擋的環境。 反對稱性導航法通過太陽子午線將偏振角劃分為具有反對稱特性的兩部分,要求其中任意一部分未被完全遮擋,相較于太陽子午線擁有更高的魯棒性,但受限于偏振角圖像并非嚴格滿足反對稱特征,測量不確定度較高。 此外,仿生偏振光導航精度與天氣、空氣質量有關,天空越晴朗、空氣質量越好,導航精度越高。當前的研究認為,在測試條件理想的情況下,航向角測量的極限精度可達角分級。蘇黎世大學[13]構建了一個偏振光羅盤,并應用于移動機器人上;德國航空航天中心(DLR)[20]研制了輕量級偏振導航傳感器,可實現對太陽位置的估計;美國Polaris Sensor Technologies公司[21]推出了Skypass系列產品,通過多幀圖像合并處理,在理想條件下定向精度可達0.1°。國內對仿生偏振光導航的研究主要集中于清華大學[22]、北京理工大學[23]、北京航空航天大學[24]、北方工業大學[25]、哈爾濱工業大學[26]、西北工業大學[27]、海軍艦艇學院[28]、中國科學技術大學[29]、南京理工大學[30]、蘇州大學[31]、國防科技大學[32]、合肥工業大學[33]、大連理工大學[34]以及中北大學[35]等。
▼表 1不同偏振導航方法比較▼Table 1Comparison of different polarization navigation methods
下面將從水下偏振光場出發,介紹水下仿生偏振光導航技術的發展現狀。
2.1水下偏振光場
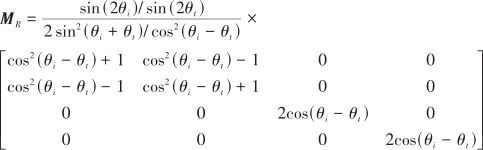
水下光場的偏振性質由于可以應用于導航、探測等各個領域而備受關注。19世紀,Fresnel 描述了光入射不同介質面的偏振特性,提出了菲涅爾公式。當折射面為空氣-水面、入射光為大氣散射光時,若以 、
、 分別表示入射光天頂角與折射光天頂角,則折射過程可描述為
分別表示入射光天頂角與折射光天頂角,則折射過程可描述為
 |
(2) |
式中, 為折射光的斯托克斯矢量;
為折射光的斯托克斯矢量; 為入射光的斯托克斯矢量;
為入射光的斯托克斯矢量; 為穆勒矩陣。
為穆勒矩陣。
此后,受Karl von Frisch研究的啟發,人們開始對海洋環境以及200 m海底的電矢量進行測量,并得到了水下偏振光場的基本特征[36-39]。1974年, Timofeeva V A [40]在渾濁水域中探測到了40%以上的偏振強度。1989年,Kattawar G W等人[41]對水下偏振特性進行了數值模擬。1995年Horva ?th等人對水下折射偏振模式進行了詳細分析[42]。2001年,Cronin T W等人[43]證實了在水下15 m處沿著任意視線方向,偏振角與太陽位置表現出簡單的函數關系。2006年,Sabbah S等人[44]的試驗證明由瑞利模型計算的偏振場與水下實際光場具有相關性。 若將空氣與水的折射率用1與1.335表示,由折射定律,最大折射光天頂角近似等于48.5°。
 |
(4) |
圖2展示了空氣水面折射示意圖。當太陽到達天頂或天空均勻地被厚云層覆蓋時,電矢量方向在除去正對天頂的水底外均是水平的[45]。在晴朗天空條件下,水下電矢量方向隨著太陽位置的改變而發生改變。
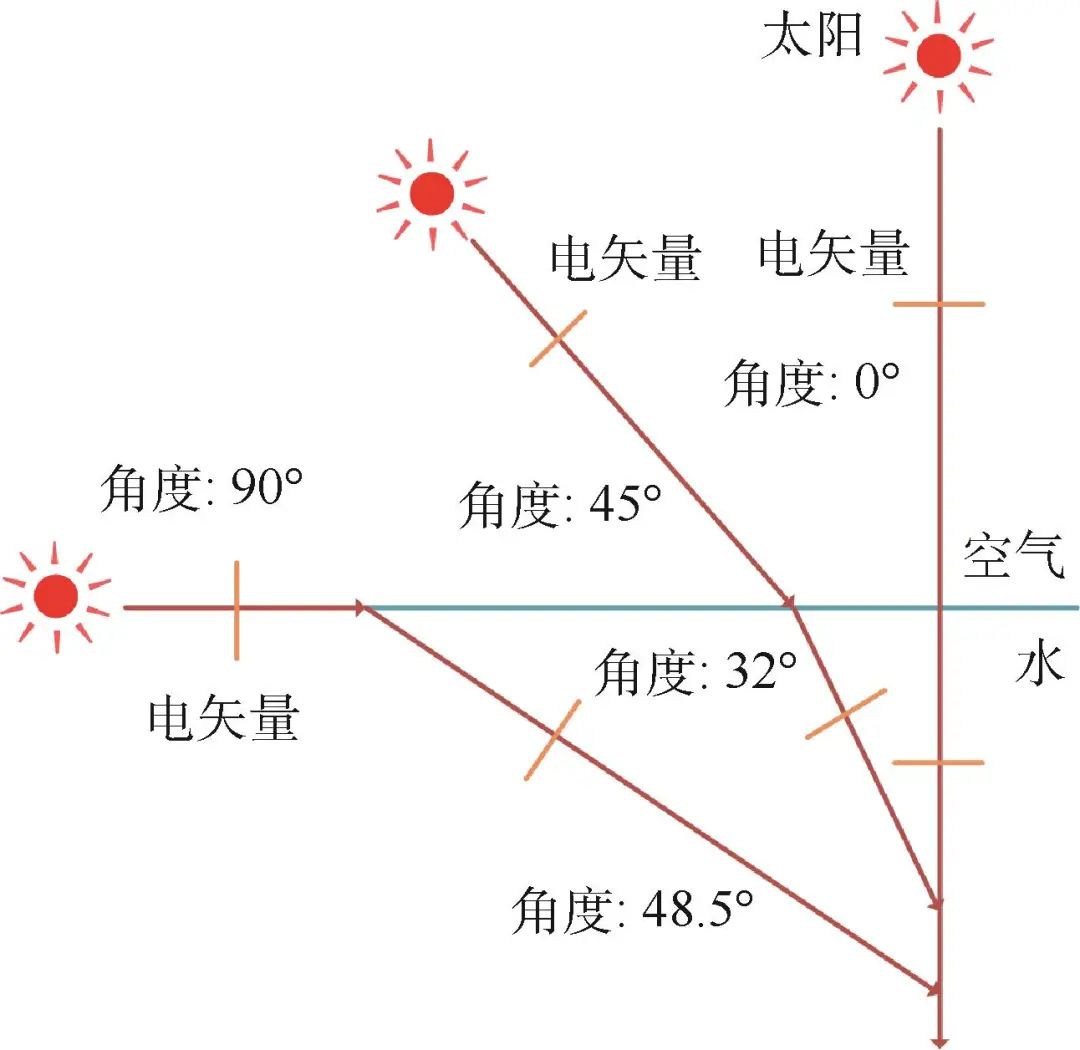
▲圖2空氣水面折射示意圖▲Fig.2Schematic diagram of air water refraction 需要指出的是,上述研究結果主要適用于非常清澈的海洋或是湖泊的前50 m,對于渾濁或是更深的區域,電矢量方向將逐漸接近水平。
2.2仿生水下偏振光導航
盡管早在1954年Waterman就發現海洋中的光線大多都是線偏振的,但受限于實驗設備等原因,利用水下偏振光進行導航的研究,于近年才逐漸開始。 2011年,Lerner A等人[46]證明了晴朗天空條件下水下偏振導航的可能性。同時,Voss等人[47-48]利用魚眼鏡頭,精確測量了水下偏振模式,推動了水下光羅盤的理論研究與應用。同年,You Y等人[49]討論了動態海洋表面下的偏振光場,建立了高動態水下偏振輻射模型。2018年,來自昆士蘭大學的Powell S B等人[50]提出了基于水下偏振信息的定位方法,其精度達到了6 m/1 km,為遠距離水下導航提供了新的可能性。2019年,Dupeyroux J等人[51]提出了紫外單像素點定向方法,并在清澈淺水區進行了偏振定向實驗,實驗結果同地面測量相仿。2020年,螳螂蝦被證明利用頭頂的偏振模式進行定向[52]。 在國內,大連理工大學于2019年[53]建立了水下單次瑞利散射偏振模型,2021年[54]研究了波長、水濁度、水成分等因素對水下大氣偏振模式的影響,證明了大氣偏振導航在不同水質條件下完成導航的可能性。2022年,北京航空航天大學[55]提出了一種基于斯內爾窗口的水下光羅盤太陽位置跟蹤算法,太陽方位與天頂角的誤差分別小于1.3°與0.3°,表明了水下光羅盤導航的巨大潛力。水下仿生偏振光導航研究進展情況如表2所示。
▼表 2水下仿生偏振光導航研究進展▼Table 2Research progress of underwater polarized light navigation

綜上可以發現,一方面,隨著精密儀器技術的發展,當前的研究現狀已經從水下偏振導航的可行性探索,逐漸轉向了水下偏振導航測試。水下偏振導航的影響因素以及水下偏振導航方法正在蓬勃發展。另一方面,從水生生物導航技術的角度看,對水下生物偏振導航的機理研究也取得了一定的突破,為仿生水下偏振光導航提供了生物學上的參考。其發展趨勢正逐漸向著深度結合水生生物的偏振導航機理的方向靠近,以期進一步提升水下偏振導航的魯棒性與適用范圍。
2.3關鍵問題
總體而言,雖然對水下仿生偏振光導航技術的研究仍處于起步階段,但這種導航方式已經在水下定位、定向以及太陽追蹤等方面展現出巨大的潛力,它不受磁干擾、沒有累計誤差且計算量小,為水下導航提供了有趣的解決方案。因此開展面向水下應用的仿生偏振光導航技術研究是十分必要的。 值得注意的是,目前水下仿生偏振光導航只是試圖將偏振模式作為指南針或定位裝置。對于水下姿態測量的研究較為匱乏。此外,仍然存在著一些水下復雜環境適應性難題急需解決,主要包括: (1)受限于水下天窗偏振信息受水濁度與深度等因素的影響,現有的導航方式難以實現高濁度深水導航; (2)水下天窗偏振信息在水花的影響下會受到破壞等問題。
3 仿生地磁導航技術
生物的遷徙與覓食在很大程度上依賴于對地磁場的精確感知。磁場強度、磁傾角、磁偏角等信息能夠幫助動物確定自身所在的位置并幫助動物完成導航[56-57]。 受生物地磁導航能力的啟發,近些年仿生地磁導航作為一類新的導航方法被提出。這種導航方式可以被視為一種多目標實時搜索的問題[58-60]。簡言之,仿生地磁導航區別于傳統地磁導航技術,它并不需要先驗地磁數據庫。在已知目標位置的地磁參量值時,通過比較目標位置與當前位置的地磁參量來得到運動參數,如圖3所示。
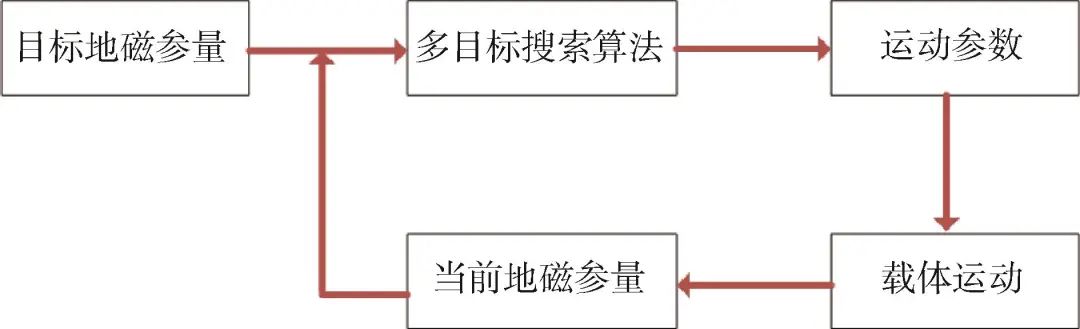
▲圖3仿生地磁導航示意圖▲Fig.3Schematic diagram of biomimetic geomagnetic navigation 本節將以磁感知機理假說模型入手,對水下仿生地磁導航的研究現狀進行分析。
3.1磁感知機理
除了來自天空的自然線索外,地磁場也在許多遷徙動物的導航中起到了至關重要的作用。通常認為,夜間遷徙的鳴禽在遠距離導航階段依賴于磁場線索[61]。20世紀,利用地磁場進行導航的能力在候鳥身上得到了證實。此后,人們對生物的磁感知機理進行了大量的研究并提出了地磁感知假說模型,其中以電磁感應、磁鐵礦受體以及自由基對假說模型為主要代表[62-66]。電磁感應假說模型認為電感與磁感之間具有密切聯系,并在鰩魚與鯊魚的研究中得到了印證[67-69],但并不確定這些生物是否利用電導體,通過靜態磁場時產生的電壓作為磁感受器[70]。此外,對于陸生生物來講,目前尚無關于此類假說的報道。這意味著生物,尤其對于陸生生物而言,似乎還存在另外的磁感知機理[71]。鳥類喙區的磁鐵礦受體被認為也許能夠感知磁場強度,而磁場的方向似乎可以利用眼睛中的自由基對來進行感知[72-73]。
需要指出的是,目前的主流觀點認為,上述三種磁感知假說似乎并不是相互排斥的,自由基對與磁受體機制可能在幾種生物中同時存在,并分別提供羅盤信息與地圖信息[74-75]。 總體來看,盡管生物如何利用地磁場的信息進行導航沒有定論,且仍不清楚生物如何在存在大量噪聲源的情況下精確感知地磁場信息,但已經形成了部分被認為在物理上可行的假說,以及支持這些假說的相關證據。這為仿生地磁導航提供了生物上的理論模型參考。
3.2水下仿生地磁導航
作為一種新興的導航方式,水下仿生地磁導航越來越受到關注。通常認為部分生物能夠利用磁羅盤與磁地圖來確定方向與位置。并通過對磁場強度或磁場線傾角的感知,這類生物能夠建立起一個基于地球磁場的生物版全球定位系統[76]。 2003年,多刺龍蝦[77]被證明可以利用磁地圖感知進行導航。2009年,Kato N 等人[78]受水生動物地磁輔助導航的啟發,仿真驗證了利用地磁信息進行導航的性能;2011年,Putman N F等人[58]發現海龜可以從地磁場中提取位置信息。2015年,Brothers J R等人[79]發現海洋生物如海龜等利用地磁線索定位筑巢海灘,并于2018年[80]從遺傳學的角度為海龜的地磁導航提供了佐證,進一步推動了水下仿生地磁導航的研究。2019年,Lohmann K J等人[81]在鮭魚中也發現了同海龜相似的地磁導航機制。
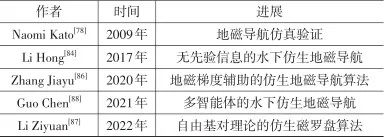
在國內,2014年,浙江大學[82-83]模擬了動物的長距離運動,此后于2016年提出了遠距離仿生地磁導航方法,并進行了仿真驗證。2017年,西北工業大學[84-85]提出了一種不使用任何先驗信息的水下仿生地磁自主導航方法,仿真結果驗證了算法的優越性。2019年,河海大學[59]發展了一種多智能體的水下仿生地磁導航算法,在磁異常干擾下獲得了良好性能。2020年,東南大學[86]提出了一種地磁梯度輔助的水下仿生地磁導航算法,仿真結果表明,即使在部分磁異常區域該仿生導航算法也可以實現有效應用。2022年,哈爾濱工程大學[87]提出了一種基于自由基對理論的仿生磁羅盤算法,相較于傳統的橢圓擬合算法,精度提升了30%以上。 水下仿生地磁導航研究進展情況如表3所示。可以看出,隨著磁感知假說模型以及對水生生物地磁導航研究的不斷深入,當前的水下仿生地磁導航技術已經可以通過結合磁感知假說模型來實現性能的提升,并且已經完成了仿真驗證。近年來,該技術已經向著水下導航試驗推進,并將為水下導航任務,特別是遠距離導航任務,提供具有高度自主性、隱蔽性以及不產生累計誤差的導航參數。
▼表 3水下仿生地磁導航研究進展▼Table 3Research progress of underwater biomimetic geomagnetic navigation
3.3關鍵問題
總的來說,國內外關于仿生地磁導航方法的研究目前主要處于生物導航機理探索以及仿真驗證階段,整體上研究還不夠深入,距離真實水下環境中的應用仍有一段距離。 需要指出的是,除了要研究高磁敏感性的材料外,目前仿生地磁導航方法還有一些難題急需解決: (1)對于水生生物地磁導航的機理認識不足,現有方法無法準確構建水下生物地磁導航的模型; (2)水下地磁導航時容易受到磁異常干擾,現有方法在磁異常干擾下難以實現準確的位置測量。
4 仿生光磁復合導航技術
按照距離目的地的遠近,生物的遠距離遷徙可以被劃分為遠距離導航、歸航以及最終目的地確定三個階段。在不同的遷徙階段,生物采用的導航手段并不完全相同,大腦的處理策略與行為有很大的差異。因此,在一段完整的遠距離遷徙中,往往需要考慮多種導航線索。 單一的仿生偏振光導航或仿生地磁導航均難以同時獲取準確魯棒的全導航信息來完成導航任務。而應用多源信息的生物導航策略為我們提供了參考。模仿生物將多源信息進行復合處理,能夠有效提升導航性能,圖4展示了結合捷聯慣導的仿生光磁復合導航示意圖。
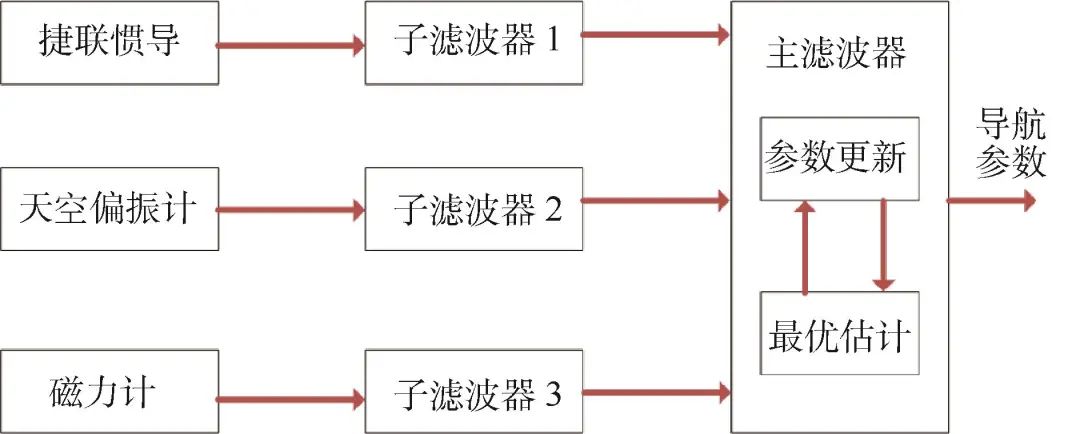
▲圖4仿生組合導航示意圖▲Fig.4Schematic diagram of biomimetic integrated navigation 本節將從生物的光磁復合導航機理入手,重點關注仿生光磁復合導航技術,簡述研究現狀與未來發展方向。
4.1光磁復合導航機理
地圖信息與羅盤信息構成了生物導航的必備要素。對羅盤信息而言,當前對來自天空的信息與磁信息的優先級別仍然存在一定的爭議。部分研究認為天空信息優先,地磁作為最后的導航手段[89]。另一些測試證明,在遷徙中,磁場作為鳥類的主要方向線索[90-92]。根據生物行為測試中的矛盾點,部分研究認為,天空線索與磁線索在生物的遷徙前與遷徙中似乎表現出不同的顯著性,即遷徙前天空線索為主要參考,而在遷徙中磁線索會被優先考慮。同時,兩者之間的反復校準可能取決于鳥類是否有一個完整的天空視野以及是否能在日落時分對天空進行觀測[93]。 另一方面,已經證明磁場的傾角與強度可以被生物利用并作為地圖線索來判斷位置[94-95]。然而,天空信息,如太陽高度等,似乎并不被動物用來確定位置。盡管太陽高度角也可以提供位置信息,但鳥類和昆蟲往往會忽略這些信息[96]。此外,鳥類及蠑螈等生物的偏振光接收與光依賴磁接收之間似乎具有一個共同的受體系統[97-98],這進一步為光磁復合導航提供了生物學上的證據。最近自由基對假說模型在視覺調制模式中對隱花色素 與
與 方向的研究,似乎展現出了與大氣偏振模型中偏振角以及偏振度相似的特征[99]。 總之,當前研究表明,在鳥類的羅盤系統中,有必要在光磁信息之間進行校準。并且在校準時環繞天頂至少95°的天空信息需能夠被生物觀測,而非僅利用天頂區域附近的偏振光線索。對于地圖系統而言,生物可以利用地磁信息來確定位置。
方向的研究,似乎展現出了與大氣偏振模型中偏振角以及偏振度相似的特征[99]。 總之,當前研究表明,在鳥類的羅盤系統中,有必要在光磁信息之間進行校準。并且在校準時環繞天頂至少95°的天空信息需能夠被生物觀測,而非僅利用天頂區域附近的偏振光線索。對于地圖系統而言,生物可以利用地磁信息來確定位置。
4.2光磁復合導航
目前,普遍認為動物的長距離遷移往往依賴于多尺度和多感官的線索整合[100]。如候鳥被證明可以利用太陽及其相關的偏振光模式、恒星、地球磁場,以及空間線索記憶等方法來進行導航。仿生偏振光導航方法與地磁導航方法均有各自的優勢以及劣勢,將不同的導航方法進行組合并實現一體化的設計可以實現互補,并可有效增強仿生導航的精度與魯棒性。 1993年,Able K P等人[101]發現候鳥利用偏振光信息矯正自身的磁羅盤。1996年,Frier H J等人[102]的實驗證明,蜜蜂除利用天空線索外,還可以利用磁線索與視覺線索進行導航。2010年,Holland R A等人[103]發現夜行性哺乳動物鼠耳蝠同樣可以利用偏振模式校準磁羅盤。2011年,Merlin C等人[104]初步揭示了昆蟲使用時間補償的偏振羅盤、地磁或夜空進行遷徙的策略。
2013年,Dacke M等人[105]發現非洲滾球蜣螂整合太陽、月亮、天空偏振模式以及地磁等信息進行導航。2018年,Fleischmann P N等人[106]發現沙蟻不僅利用偏振光、路徑積分、地標導航,還可以利用地磁場作為指南針線索。2019年,Lindecke O等人[107]首次證明遷徙蝙蝠利用日落時的偏振羅盤矯正指南針系統。2020年,Wehner R等人[108]發現沙蟻將偏振、視覺、地磁、嗅覺、觸覺等信息結合進行導航。
2022年,Giuseppe B等人[109]發現遷徙的鳴禽可能采用身體對準的方式整合來自天體和磁場的方向線索。2023年,Tonelli B A等人[110]提供了宏觀生態學證據,表明了鳥類普遍依賴有利的太陽和磁場條件來準確遷移。 國內,2009年,合肥工業大學[111]設計了一種偏振光、地磁與GPS組合導航的實驗平臺。2015年,大連理工大學[112]提出了一種融合偏振光以及地磁場的定位方法,驗證了光磁復合的可行性。2018年,西北工業大學[113]提出了一種利用偏振光與地磁確定近地軌道微衛星姿態的方法。2019年,國防科技大學[114]提出了一種偏振光、地磁、慣性的組合導航方法,提高了導航系統的環境適用能力。
2021年,北京航空航天大學[115]提出了一種基于觀測度的自適應聯邦濾波算法,提高了慣性、偏振光、地磁組合導航的可靠性;并于2022年[116]提出了一種應用于遠洋航行的捷聯慣導、仿生偏振光、地磁的組合導航方法;2022年,揚州大學[117]討論了捷聯慣導、GPS、偏振光以及地磁組合導航系統的飛行對準問題,有效提升了組合導航性能。同年,北方工業大學[118]提出了一種基于深度Q學習網絡的陀螺儀、加速度計、偏振光以及磁力計的組合導航方法,提高了姿態估計精度。之后,中北大學[119]建立了一種基于優化三軸姿態算法的偏振光地磁導航組合定姿模型。仿生光磁復合導航方法對比如表4所示。
▼表 4仿生光磁復合導航方法對比▼Table 4Comparison of biomimetic polarization and geomagnetic composite navigation methods
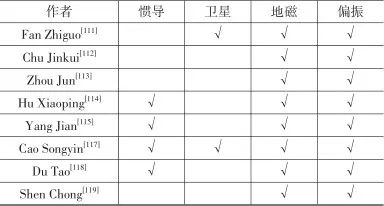
總的來講,當前的研究集中于生物的多源導航策略以及仿生多源導航信息策略的初步驗證階段。導航范圍已經從地面或近地面導航拓展至航天[113]與航海[116]。目前生物如何整合多種導航信息的機理仍不清楚,這些線索的相互作用以及重要性關系仍然是研究的熱點。未來,對于僅使用光磁復合的導航方法而言,利用偏振光信息矯正磁羅盤信息為主要的研究方向。而在多傳感器融合的導航方法中,主要以慣性導航為核心展開研究,其研究熱點為如何利用仿生光磁信息提升組合導航性能。
4.3關鍵問題
綜上,國內外對于光磁等導航線索相互作用的導航機理研究較淺,仍然存在許多爭論,在導航方法上處于初探階段,同樣有待進一步深入研究。 此外,受限于水下仿生偏振光導航與水下仿生地磁導航技術的研究現狀,當前水下仿生多源導航信息處理技術還未進行系統研究。關于水下仿生光磁復合導航的研究開展得較少,主要存在的難點與問題為:水下環境惡劣,光磁復合導航受干擾嚴重,現有地面或近地面的仿生光磁復合導航方法難以直接應用于水下導航之中等。 但毋庸置疑的是,根據生物的導航技術特點,水下仿生光磁復合導航必將成為未來水下仿生導航的一大熱點方向。
5 發展趨勢
(1)渾濁水域/深水的偏振探測與仿生導航。當前,水下偏振導航的研究局限于淺水或清澈水域,當AUV航行至深水或渾濁水域時,仿生偏振導航將失效,導航結果會變得不再可信。因此,突破水下能見度限制,實現渾濁水域/深水的仿生偏振探測與導航解算,將能夠有效擴展仿生偏振導航的應用范圍。 (2)水花/波浪等復雜環境下的高魯棒、高精度水下偏振導航。水下導航資源受限,天空偏振信息會耦合來自水花/波浪等復雜環境帶來的量測噪聲。現有的方法存在算法復雜度高、補償效果不理想等問題,因此,水下復雜環境中的高魯棒、高精度偏振導航方法急需深入研究。 (3)水生生物的磁感機制與導航原理。當前的研究表明,水生生物同陸生生物的磁感機制似乎存在不同,并且這一磁感知機制可能并不單一。
探明水生生物如何完成磁信息感知與導航將為仿生磁導航技術提供進一步的生物學參考,并有望實現水下仿生磁導航的技術突破。 (4)水下磁異常干擾的仿生地磁導航。水下環境復雜,地殼中磁性物質的分布不規律、強度不均勻引起的地磁異常可能導致仿生地磁導航方法的失效。盡管當前對水下磁異常下的仿生導航方法進行了一定的研究,但仍然存在算法復雜度較高等問題。因此,對磁異常干擾下的仿生地磁導航技術的研究將有望提升仿生地磁導航技術的魯棒性。
(5)水下仿生偏振光羅盤與磁羅盤的信息矯正策略。生物的光磁羅盤信息矯正為水下仿生光磁復合導航提供了新的研究思路,并將實現信息互補,有望提升水下仿生導航的定向精度。 (6)水下仿生光磁復合導航方法。水下環境復雜,單一導航手段容易受到干擾。模仿生物的復合導航策略,研究融合多種感知手段的仿生光磁復合導航技術至關重要,將能夠有效提升水下航行的自主性,并拓寬水下航行范圍。
6 結 論
受生物讓人驚嘆的導航能力的啟發,仿生導航技術在近些年受到了廣泛的關注與研究,并從地面或近地面的研究轉向了更加復雜的水下環境。本文對仿生光磁導航技術進行了回顧,重點關注了水下仿生偏振光導航、水下仿生地磁導航以及光磁復合導航技術的研究現狀與關鍵問題,并對未來的發展趨勢進行了展望。水生生物簡潔高效的導航技術,使得當前的水下仿生導航技術被寄予厚望,以期補償現有導航手段的不足,并完成全自主、高魯棒的水下導航任務。
審核編輯:黃飛
-
gps
+關注
關注
22文章
2903瀏覽量
166745 -
定位系統
+關注
關注
10文章
588瀏覽量
36541 -
衛星導航
+關注
關注
3文章
228瀏覽量
27086 -
導航技術
+關注
關注
0文章
34瀏覽量
9627
原文標題:【推薦閱讀】水下仿生光磁導航技術綜述
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
TPMS技術與發展趨勢
磁傳感器未來發展趨勢特點分析
磁耦數字隔離技術的應用及發展趨勢
通過最終顯示背板技術探討LED發展趨勢
未來隧道定位導航技術有哪些發展趨勢






 工商網監
工商網監
評論