 RTK、PPP與RTK-PPP?一文帶您認識高精定位及如何進行高精定位GNSS測試!
RTK、PPP與RTK-PPP?一文帶您認識高精定位及如何進行高精定位GNSS測試!
高精度定位與相關技術
隨著全球定位技術的不斷發展,人們對精準定位的需求也逐漸增加,GNSS技術已經成為了自動駕駛等許多關鍵領域的基礎,而伴隨著新興技術的出現與硬需求,GNSS的定位精度要求也越來越高,因此高精定位技術也越發重要。
關于GNSS與定位精度
1.GNSS技術發展
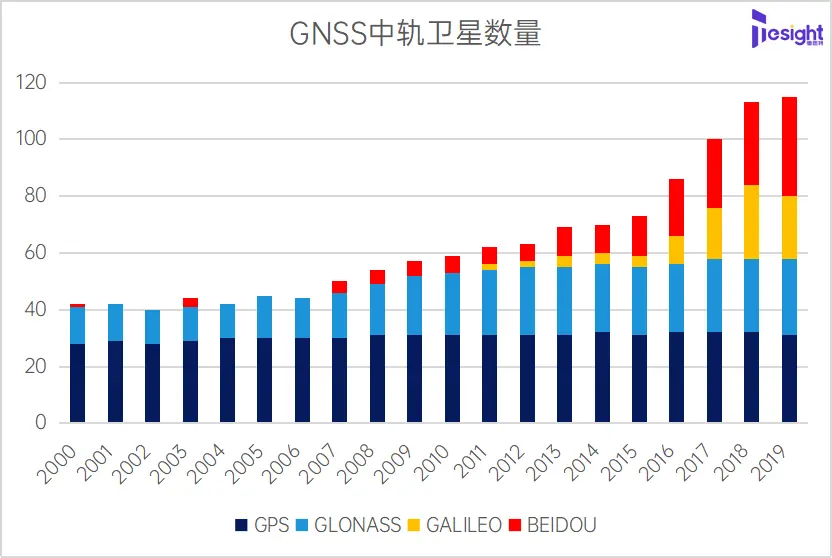
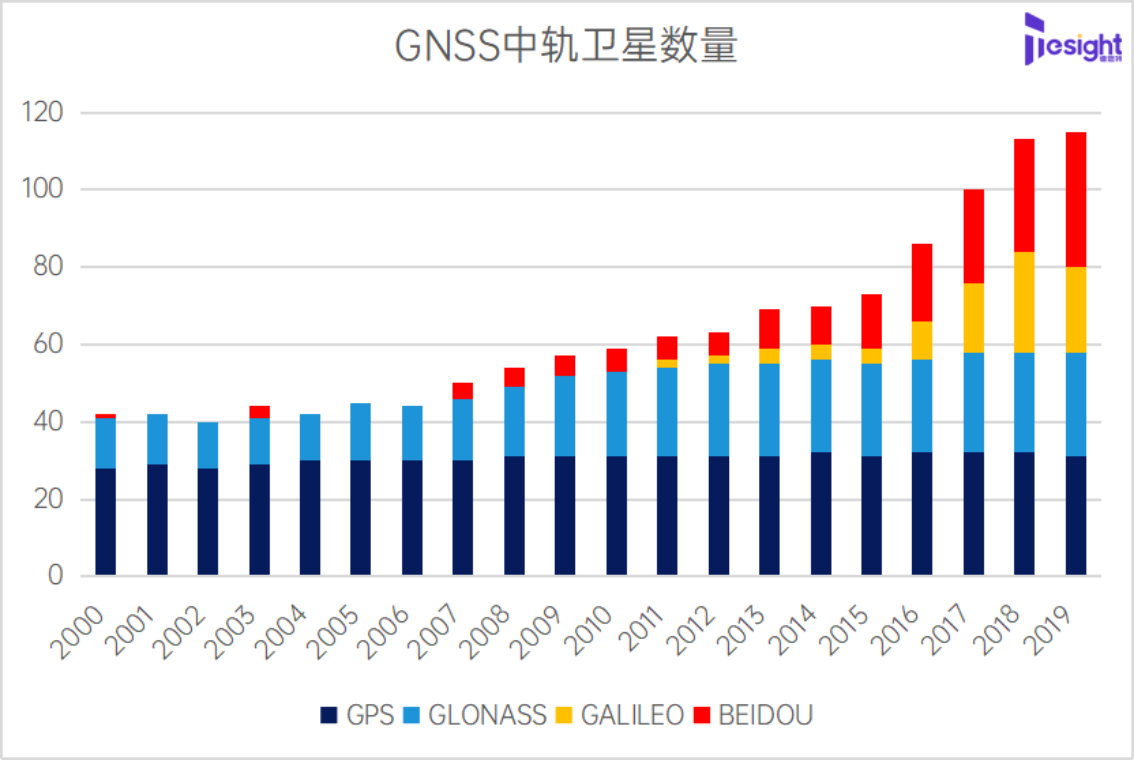
GNSS技術,即全球定位衛星系統,目前有美國的GPS、俄羅斯的GLONASS、歐洲的Galileo和中國的北斗,可以為全球用戶提供高精度的定位、導航和定時服務。GNSS系統的衛星數量在不斷增加,目前已經超過100顆。這意味著更多的衛星可用于提供全球定位服務,從而提高了定位的精確性和覆蓋范圍。
2.不同技術的定位精度
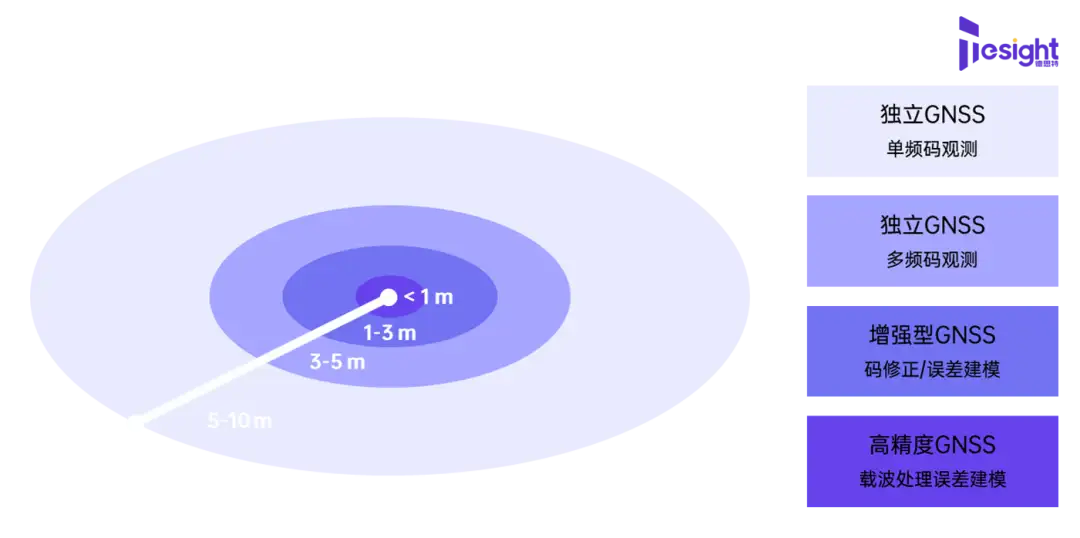
最初的GNSS接收器主要依賴于獨立單頻測量,其定位精度在5-10米左右。這種技術僅使用衛星的偽距數據來計算位置,精度有限。
在技術進步的推動下,多頻接收器開始廣泛使用,接收器能夠同時使用不同頻段的信號。這提高了信號的質量和精度,并有助于減小定位誤差,其定位精度約在3-5m。
隨著GNSS技術進一步發展,來越多的增強方法被應用到GNSS技術中,如基于偽距的距離修正和誤差建模,允許對衛星信號的誤差進行建模和校正,從而提高了定位精度。即通過糾正大氣延遲、鐘差、衛星軌道誤差等因素,可以將位置精度提高到1-3米,可以實現在不同應用領域中的高精度定位,包括民航、農業、測繪等。
目前,GNSS技術已經演進到了能夠實現高精度定位的階段,包括使用載波處理技術來處理衛星信號,實施更精確的誤差建模,以及采用RTK(實時差分定位)和PPP(精密點對點)技術。使用這些方法,定位精度可以進一步提高到小于1米,滿足了對精準定位的高要求,如測繪、自動駕駛汽車、無人機和精密農業等領域的需求。
3.定位誤差與消除方法
(1)誤差來源
然而由于設備、環境、衛星位置等各種原因,GNSS定位不是完全準確的,會受到多種誤差的影響,導致最終的定位有所偏差。常見的誤差來源有:
● 電離層誤差(lonospheric errors)
● 對流層誤差(Tropospheric errors)
● 衛星軌道誤差(Satellite orbit errors)
● 衛星時鐘誤差(Satellite clock errors)
● 傳輸噪聲與多徑(RX noise and multipath)
● 接收機時鐘誤差(Receiver clock errors)
● 用戶等效測距誤差(UERE,user equivalent ranging error)
● 水平精度因子(HDOP,horizontal dilution of precision)
(2)如何消除誤差
對于電離層誤差,其影響因素主要是仰角、頻率、正上方電子總量TEC,我們可以通過嵌入klobuchar電離層模型參數進入導航信息,降低近50%的誤差。此外,也可以通過多頻方法,獲取電離層自由偽距參數,采用距離校正計算,幾乎可以消除電離層誤差。
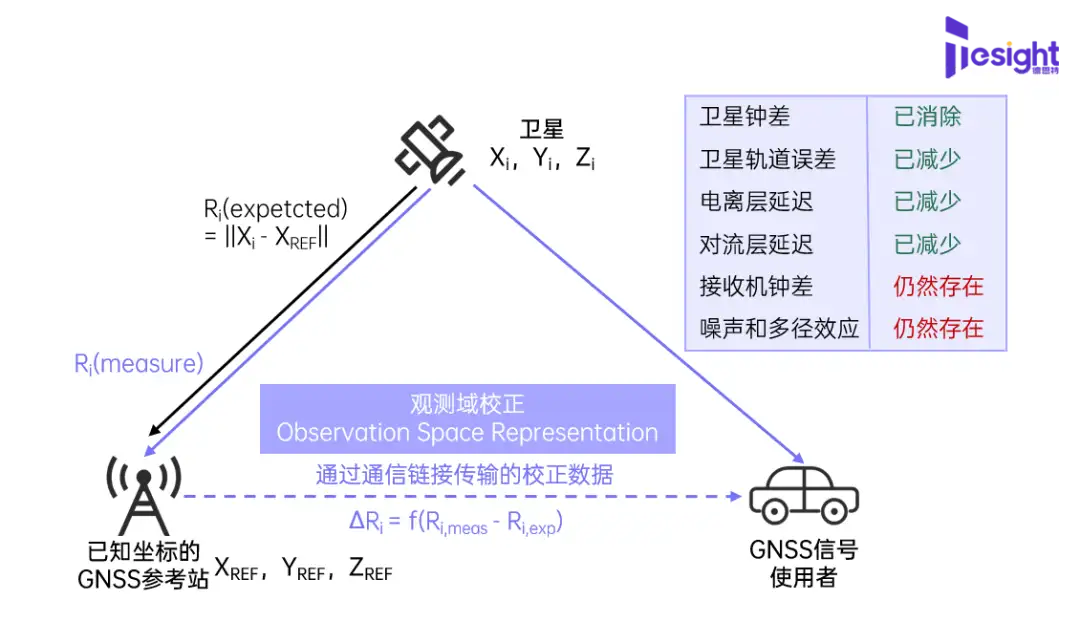
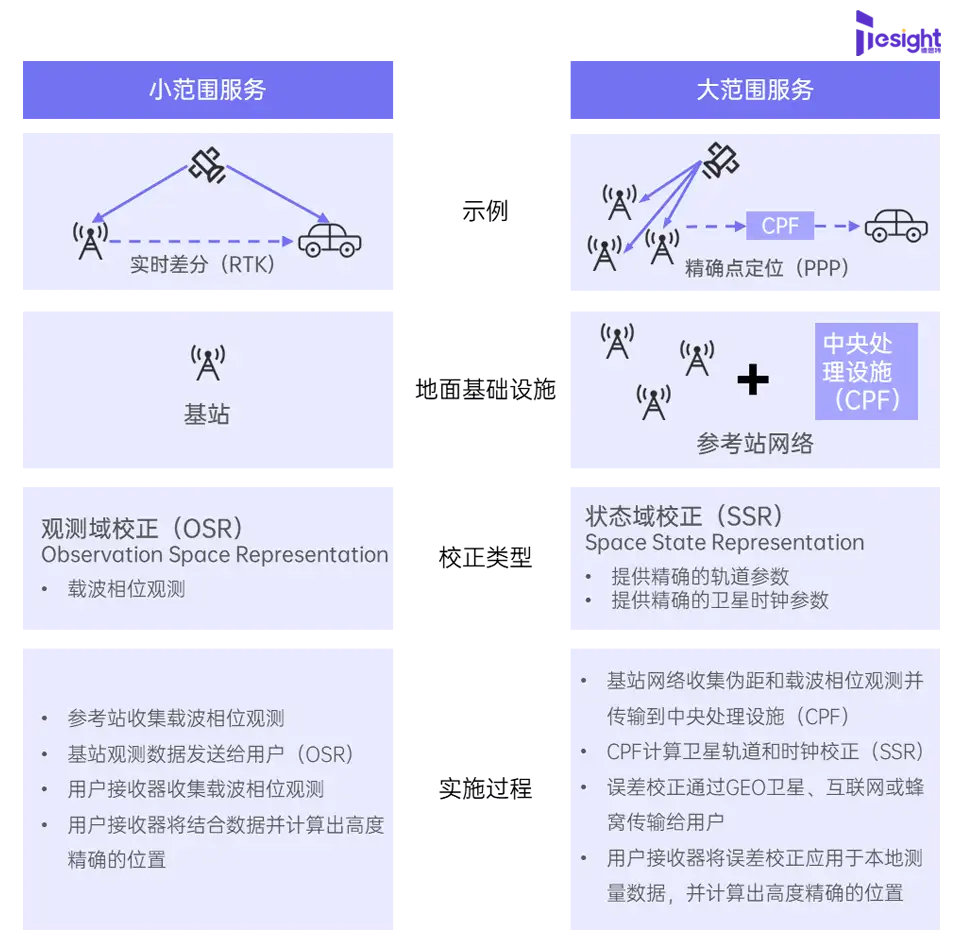
此外通過引入地面觀測站的方式可以實現對衛星鐘差、衛星軌道誤差、電離層誤差、對流層誤差的減少或消除。根據覆蓋區域和實現方式不同實現機制主要有兩種:
● Observation Space Representation,觀測域校正——小范圍校正,直接利用基站進行校正信息傳輸,例如RTK。
● State Space Representation,狀態域校正—— 大范圍乃至全球覆蓋,利用中心處理站解算與處理校正信息,并利用互聯網,衛星網絡等傳輸,例如PPP。
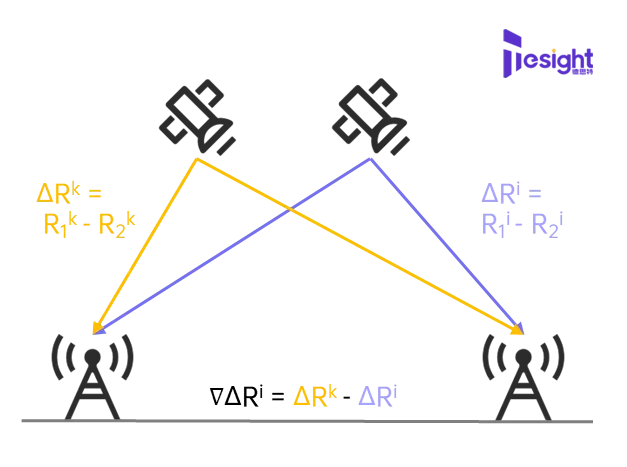
(3)通過雙差分方式消除接收機誤差
雙差分(Double-Difference)是全球導航衛星系統(GNSS)定位中的一種差分定位方法,旨在減小或消除定位中的一些誤差來源。與單差分定位不同,雙差分同時考慮了兩個接收器之間的相對位置差異以及兩個衛星之間的相對位置差異。這個方法在相對定位和高精度定位應用中非常有用。通過該方式可以有效減小或消除衛星鐘差、衛星軌道誤差、電離層誤差、對流層誤差,此外還可以消除接收機鐘差。
(4)其他辦法
此外,可以配之其他復雜方法,削弱或消除多徑與噪聲影響,如載波模糊度解算與基線處理。
RTK、PPP與RTK-PPP技術
1.RTK技術
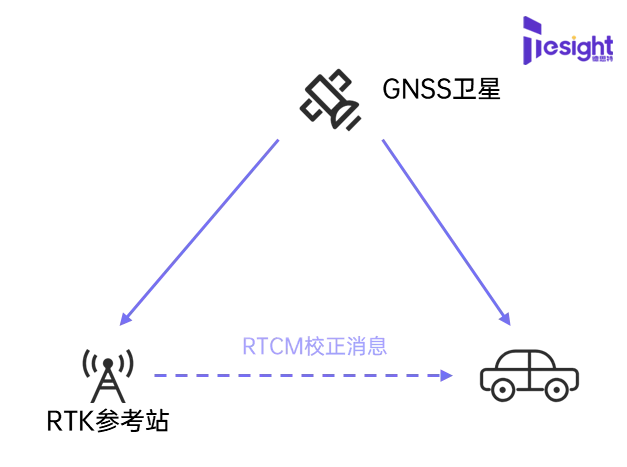
RTK(Real-Time Kinematic)技術基于兩個GNSS接收器,其中一個充當基準站,另一個作為流動站。基準站精確定位并連續跟蹤衛星信號,同時記錄數據,而流動站接收衛星信號以定位自身,并從基準站獲取包含校正數據的RTCM信息來通過差分運算校正誤差。這一過程實現了毫米級的高精度三維實時定位,依賴于實時傳輸的校正數據,適用于測繪、建筑、農業、無人機導航等多個應用領域。
RTK技術的主要特點是在實時中提供毫米級別的定位精度。RTK是基準站與流動站之間的直接校正信息傳輸,因此可以解決衛星、傳輸軌跡以及接收機本身的誤差問題,但覆蓋區域小,并且精度隨著兩者之間的距離增加而降低。
2.PPP技術
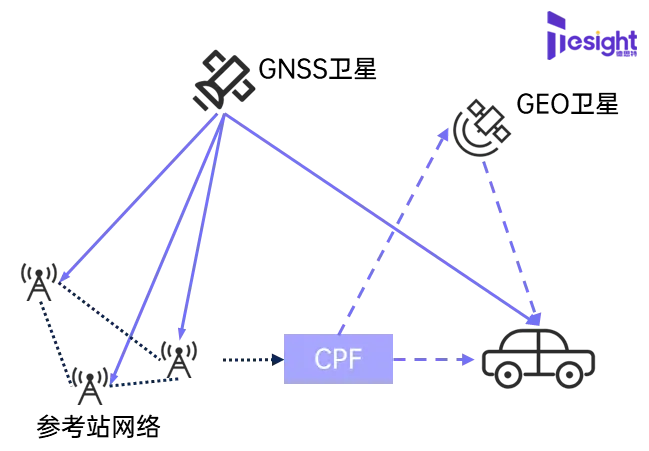
PPP(Precise Point Positioning)技術是一種高精度的全球導航衛星系統(GNSS)定位技術,它是一種廣域的部署方案,通過CPF解算衛星誤差并傳輸給接收機做校正,允許用戶實現毫米級的三維位置精度,而無需依賴差分基站。與差分定位技術不同,PPP技術不需要在接收器和差分基站之間建立通信鏈接。用戶只需單獨的GNSS接收器和訪問PPP校正數據的互聯網連接,即可進行高精度定位。PPP技術適用于全球范圍,因為它不依賴于特定地理區域內的差分基站,只需有足夠的衛星可見性即可進行定位。但通常需要更長收斂時間的衛星信號觀測來實現高精度,因此對于需要長時間持續定位的應用更為適用。
3.二者的對比
本質上來講,這兩種技術都是在傳統GNSS定位的基礎上,使用增強技術來提高GNSS定位精度的,是在不同校正域上的延伸與實現。
4.PPP-RTK技術
在上述的介紹中可以發現,RTK技術與PPT技術各有優劣——RTK定位時間快,但是覆蓋距離小;PPP定位精度高,全球覆蓋,但是收斂時間慢,且部署成本較高。隨著需求和技術的發展,將PPP與RTK結合的技術(PPP-RTK)也出現了。
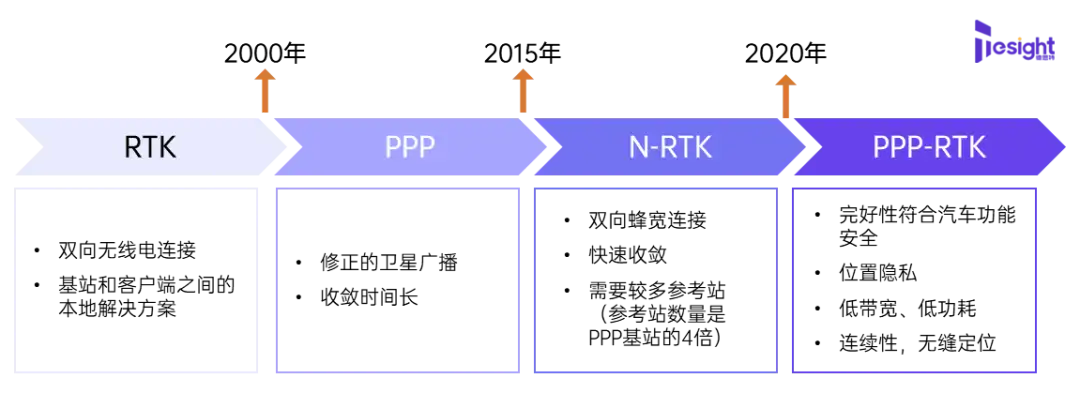
PPP-RTK是未來的主流與趨勢,PPP-RTK狀態域具備完好的服務優勢,可以實現全覆蓋、高精度、收斂快的高精度GNSS定位技術。
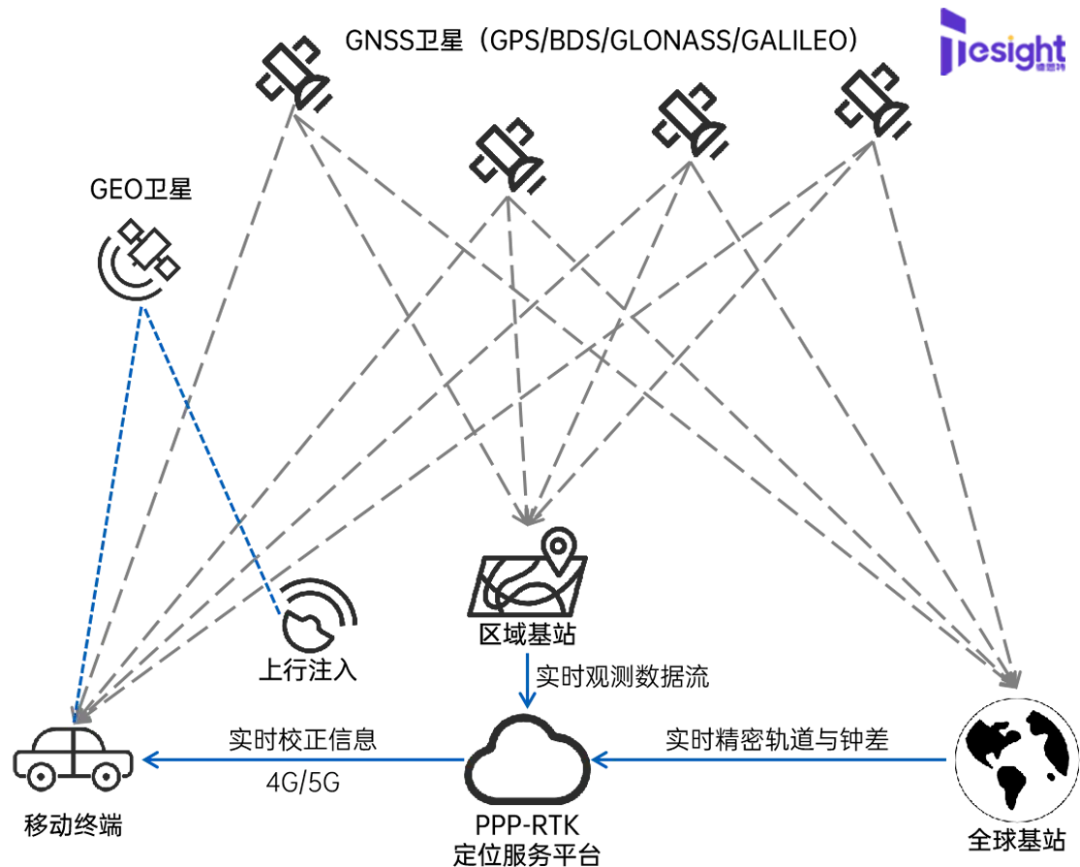
其主要原理為使用全球基站確定衛星鐘差、衛星軌道誤差;使用區域基準站對電離層誤差、對流層誤差等區域性誤差進行了分析,建立整網的電離層延遲、對流層延遲等誤差模型;并將全球和區域的誤差產品發送給移動終端進行定位。總的來看,具有以下優勢:
● 全國覆蓋
PPP-RTK僅需不超過1000基站即可實現全國覆蓋,極大減少基站建設的成本投入,提高服務覆蓋范圍。
● 單向播發
PPP-RTK采用單向廣播模式,更易實現海量用戶并發。同時,單向播發的服務模式能有效的保護用戶隱私。
● 連續性
PPP-RTK對各項誤差采用廣域統一建模,提供全國范圍內的無縫連續定位服務。
● 完好性
PPP-RTK通過將GNSS各類誤差分別建模并提供給用戶,各類誤差相互獨立,可分別進行完好性監測并生成相應的完好性產品,實現功能安全。

如何進行高精度GNSS測試
可以看到近些年依托于GNSS的高精定位技術發展迅猛,大量的新技術,新應用,新方向層出不窮。如何在項目前期進行相關算法、環境、項目與技術的測試與檢驗,成為了一個重要的話題。
1.怎么樣的GNSS測試方法是好的測試?
(1)可重復性,可控性
進行高精度的GNSS測試需要在可重現和可控的環境中對GNSS接收器進行測試,特別是在項目的初期,當有很多參數和特性還不清楚時。通過高效且準確地控制測試場景和環境,可以實現精確的一致重復性測試,這對于項目的快速推進和問題的解決至關重要。
(2)可操作性
進行GNSS測試需要能支持對于設備與系統的實時操作,例如按照特定需求來設置制定的時間、地點信息,注入特定的“錯誤”和相應的校正數據等,用于對設備進行確定性驗證與可預期的功能測試。
(3)HIL能力:
伴隨著GNSS與定位導航產品的集成度越來越高,GNSS測試需要能夠接入現有系統進行實時在環仿真,允許工程師近乎真實的模擬與測試應用場景,以驗證其性能和功能,減少潛在風險,加快產品開發,并提高系統質量,因此要求測試能夠支持在組件或整車級別將系統作為“黑匣子”進行測試。
(4)實時性:
在測試GNSS時,尤其是應用HIL仿真方式時,需要能夠使用來自實時GNSS的實時網絡校正數據進行測試。系統的延遲越低,實施性越好,在自動駕駛與高精定位行業的應用是十分重要的,一方面有助于真實模擬極限情況下的決策與響應能力,另一方面如果延遲太高,就會導致測試系統的實際響應與實際硬件的響應之間存在差異,從而影響測試的準確性。高延遲可能導致測試結果不可靠,甚至誤導性,因此需要盡量降低延遲以獲得可靠的HIL測試結果。
(5)性價比:
由于高精GNSS測試需要對現有的測試方案做改進,在面向新興應用時都希望測試系統足夠高效,減少所需的時間和資源;此外,在面對測試標準與方式有改變時,現有測試方案可以快速迭代、改變并無需花費大量的成本。
2.測試方法
GNSS模擬器是GNSS高精測試的關鍵產品,是基于軟件定義架構的GNSS模擬器,是依托“依托軟件引擎,開放硬件平臺,高效開放地完成GNSS仿真”的自有Skydel GNSS仿真引擎的全面解決方案。
GNSS模擬器可以模擬接收機的接收口徑上的GNSS信號,模擬不同衛星的信號(包括位置、速度、時間信息),模擬誤差和干擾,如多徑效應、大氣延遲等,實現近乎真實的場景模擬。
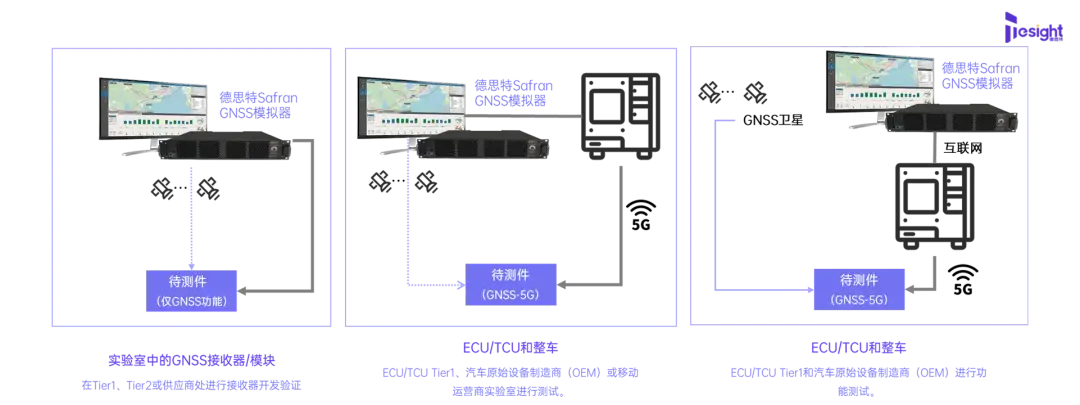
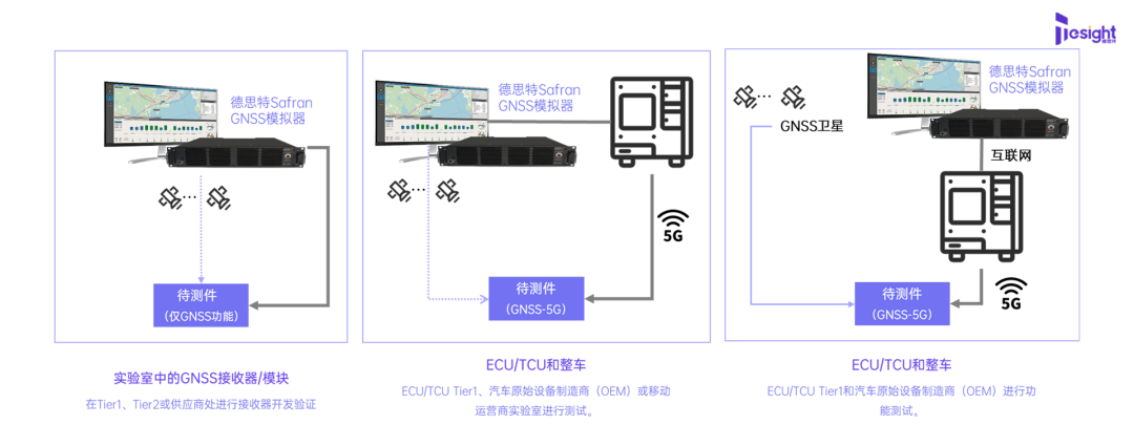
可以幫助用戶最大程度上高效快速的完成各階段測試:
① 在Tier1、Tier2或供應商處進行接收器開發驗證,通過輻射或傳導方式對待測件的GNSS功能做實驗室級別測試。
② ECU/TCU Tier1、汽車原始設備制造商(OEM)或移動運營商實驗室進行前期的ECU/TCU和整車的GNSS功能測試,結合基站模擬器完成對GNSS+5G的融合測試。
③ ECU/TCU Tier1和汽車原始設備制造商(OEM)進行完全迫真的GNSS全面功能測試,完成結合5G,GEO網絡,RTK/PPP基站等的全面高精度GNSS定位測試,對RTK,PPP,RTK-PPP設備的功能與性能進行完整的驗證與測試。
GNSS仿真測試在未來自動駕駛等新興領域中扮演著至關重要的角色,用于提前確保定位導航功能的可靠性。GNSS模擬器是實現GNSS高精度測試的關鍵工具,為用戶提供了可控和可重復的測試方案,同時允許用戶實時編輯和定義自己的GNSS仿真測試場景。利用GNSS模擬器,用戶可以實現小于5 ms延遲的HIL閉環仿真,使測試盡可能接近真實情況。該模擬器基于軟件定義架構,為用戶提供了靈活性和可擴展性,使其能夠適應未來測試需求的變化;而這樣的架構,不僅保證了整體成本的合理性,還提供了出色的性價比。
自動駕駛與高精度定位的其他技術
1.什么是POS?
高精度POS(positioning and orientation system)即定位定姿系統,是指一種精確測量和確定物體在地球表面或三維空間中的準確位置的技術。高精度POS通常倚賴衛星導航系統(如全球定位系統,GPS)的精確測量,以及其他傳感器(如慣性測量單元,IMU)和校準技術,以提供高精度的位置信息。
在自動駕駛領域里,隨著自動駕駛技術的成熟和自動駕駛行業的逐漸發展,對數據精度的要求越來越高,其中高精度POS將逐步取代GNSS定位與IMU作為源數據的來源,提供更高精度、形式更豐富的自動駕駛數據。

2.什么是DGNSS?
差分全球導航衛星系統(DGNSS),是對GNSS的增強,旨在糾正GNSS系統中的部分錯誤和不準確性,從而提供更準確的定位信息。通常,訪問校正信息可使差分GNSS接收器比其他接收器更準確;消除這些誤差后,GNSS接收器有可能達到高達10厘米的精度。
該系統所基于的假設是,彼此非常接近(例如,在幾百公里內)的任何兩個接收器都將經歷相同的大氣誤差。因此,差分GNSS使用至少兩個GNSS接收器。一個接收器必須位于一個精確的已知位置;這個接收器用作基站或參考站,另一個稱為流動接收器。基站接收器計算其由GNSS衛星計算出的位置與其實際已知位置之間的差異。差異是糾錯因子,然后將其傳輸到流動接收器(或多個流動接收器)以校正其測量結果。可以使用無線電信號在現場實時應用更正后的信息。
差分GNSS可以使用固定的地面參考站網絡來發送GNSS衛星廣播的位置與已知固定位置之間的差異。DGNSS可以指任何類型的地基增強系統(GBAS),全世界有許多正在使用的地面系統。
從軌道衛星而不是地面發射器傳輸校正的類似系統稱為WAAS(廣域增強系統)或WADGPS(廣域差分全球定位系統)。有時作為同義詞使用,基于衛星的增強系統 (SBAS) 可以包括軌道衛星系統,它已在世界其他地區實施,例如EGNOS、MSAS、QZSS和GAGAN。如今,大多數商業GNSS接收器都支持一種帶有SBAS的差分校正形式。
RTK就是在DGNSS的基礎上,進一步利用衛星信號的載波相位對這種情況進行了修正,因此可以使定位精度進一步達到厘米級。
3.什么是A-GNSS?
A-GNSS(Assisting-GNSS,輔助GNSS,又稱網絡增強衛星定位系統 )是一種GNSS增強系統,通常可以顯著提高全球導航衛星系統(GNSS)的啟動性能,即首次定位時間(TTFF)。利用普通的移動通信網絡,傳送增強校正數據,加強或者加快衛星導航信號的搜索跟蹤性能與速度,可以明顯縮短接收機的首次定位時間,同時可以在受到一定遮擋的情況下(或者半開闊區域),也能實現衛星導航定位。
所提供的輔助信息,包括導航衛星的歷書、星歷、頻率范圍、標準時間和近似位置等。通過提供輔助信息,使GNSS接收機在捕獲之前就知道應該捕獲的頻率范圍,然后輔助數據再提供用來計算GNSS用戶位置的衛星所在位置。一旦捕獲衛星信號后,剩下的工作就是偽距的測量(僅僅需要幾毫秒,而不是幾分鐘),然后A-GNSS接收機開始計算用戶的位置。首次定位時間從1分鐘或者幾分鐘量級縮短到1秒量級。此外,由于A-GNSS接收機被設計為預先知道需要搜索哪個頻率,接收機的信號搜索跟蹤過程就變得較為簡單,有針對性地壓縮接收機搜索頻帶,降低噪聲帶寬,增加信號能量的累計時間,從而增加了A-GNSS接收機的靈敏度,并允許它捕獲更弱的信號。
-
PPP
+關注
關注
0文章
19瀏覽量
10551 -
GNSS
+關注
關注
9文章
789瀏覽量
48140 -
RTK
+關注
關注
8文章
132瀏覽量
37613
發布評論請先 登錄
相關推薦
GNSS 多星定位原理及校正方式對比
TAU1312 多系統多頻 RTK 定位模塊
TAU1308 多系統 RTK 定位模塊
百度Apollo高精定位方案分析
PPP已成為RTK,瞬時實現厘米級GNSS全球定位
如何對RTK高精度定位算法進行驗證
自動駕駛高精定位的PPP-RTK可行的系統架構設計方案
自動駕駛定位方式:RTK定位與激光融合定位


u-blox攜手合作伙伴共同開發新一代PointPerfect PPP-RTK增強型智能天線
RTK、PPP與RTK-PPP?一文帶您認識高精定位及如何進行高精定位GNSS測試!(一)
RTK、PPP與RTK-PPP?一文帶您認識高精定位及如何進行高精定位GNSS測試!(二)
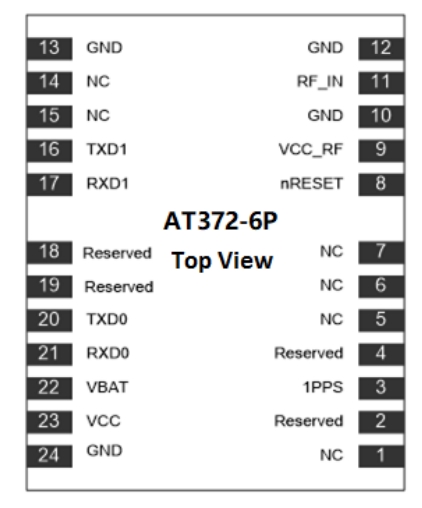
AT372-6P杭州中科微GNSS單頻RTK高精度定位模塊datasheet





 工商網監
工商網監
評論