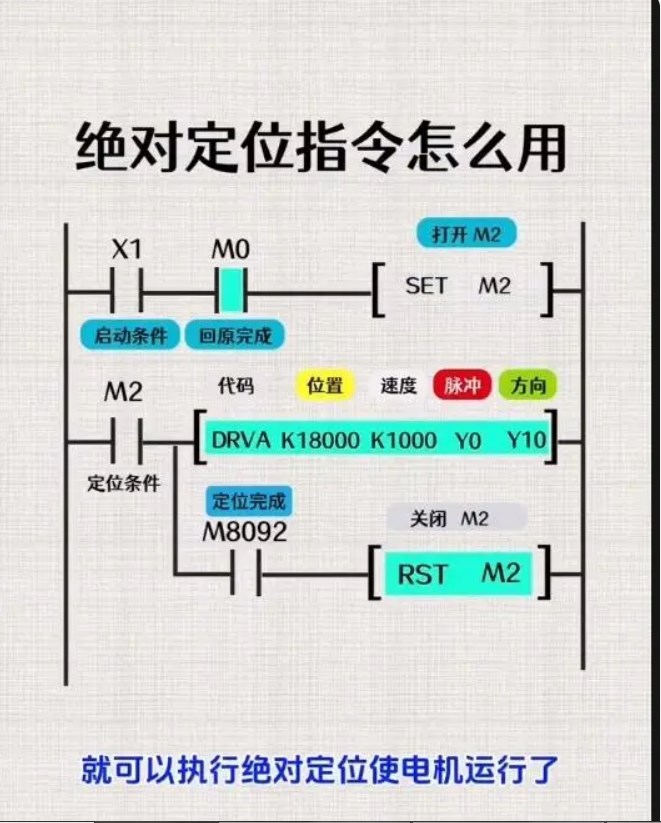
 定位指令中的絕對定位是什么?絕對定位指令怎么用?
定位指令中的絕對定位是什么?絕對定位指令怎么用?
在自動化設備和機器人技術中,定位指令是一種非常重要的控制手段。它可以幫助設備或機器人精確地移動到預定的位置,從而實現各種復雜的操作。在定位指令中,絕對定位是一種常用的定位方式,它是指根據預先設定的目標位置,直接計算出設備或機器人需要移動的距離和方向,從而實現精確定位。本文將詳細介紹絕對定位的概念、原理以及使用方法。
一、絕對定位的概念
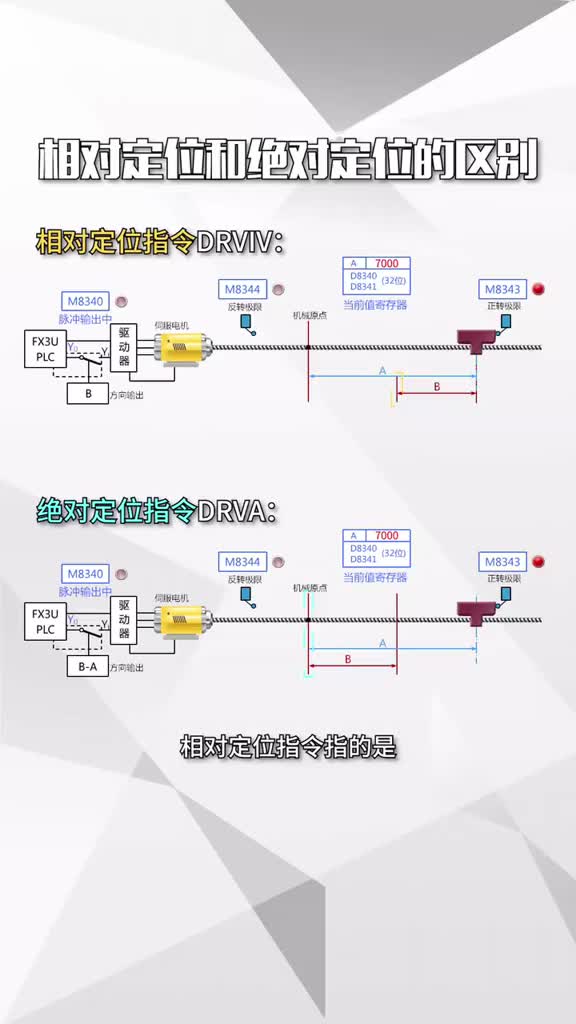
絕對定位是一種基于目標位置的直接定位方法,它不需要依賴設備或機器人當前的位置信息,而是直接根據預先設定的目標位置來計算需要移動的距離和方向。絕對定位的優點是定位精度高,不受環境因素的影響,適用于各種復雜環境下的定位任務。但是,絕對定位的缺點是需要預先知道目標位置,對于未知環境的適應性較差。
二、絕對定位的原理
絕對定位的原理是根據設備或機器人的運動學模型,通過計算目標位置與當前位置之間的距離和方向,來控制設備或機器人的運動。運動學模型通常包括設備的關節角度、長度等參數,以及設備的運動學方程。通過求解運動學方程,可以得到設備或機器人在各個關節上的轉動角度,從而實現精確定位。
在實際應用中,絕對定位通常采用以下步驟:
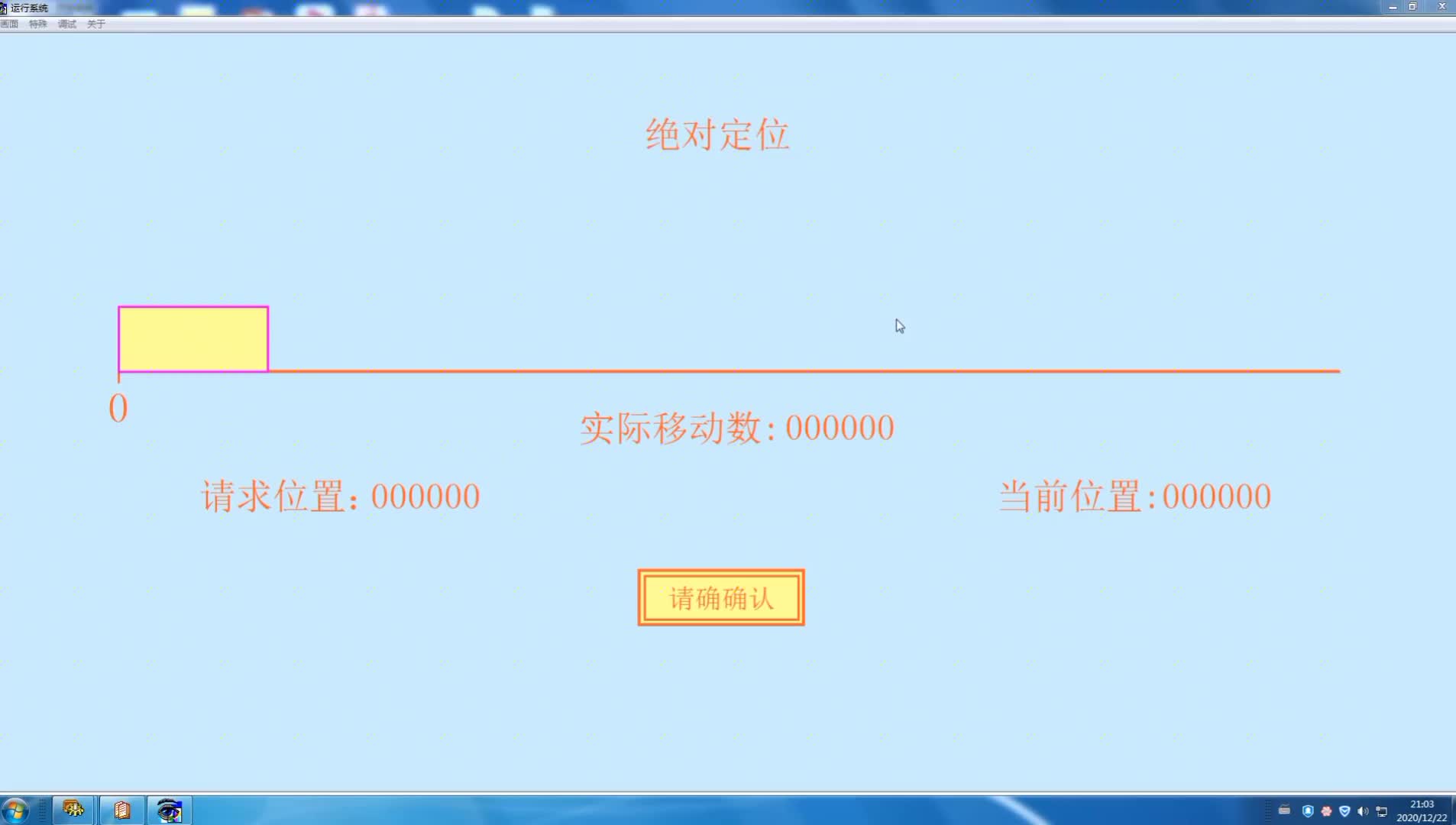
1.確定目標位置:根據實際需求,預先設定設備或機器人需要到達的目標位置。目標位置可以是二維坐標系中的點,也可以是三維空間中的點。
2.獲取當前位置:通過傳感器或其他手段,實時獲取設備或機器人當前的位置信息。當前位置信息可以是二維坐標系中的點,也可以是三維空間中的點。
3.計算距離和方向:根據目標位置和當前位置,計算設備或機器人需要移動的距離和方向。距離可以通過勾股定理或其他數學方法計算得到,方向可以通過向量運算得到。
4.控制設備或機器人運動:根據計算出的距離和方向,控制設備或機器人的運動。運動控制可以通過電機驅動、液壓驅動等方式實現。
5.檢測并調整:在設備或機器人運動過程中,實時檢測其位置信息,并與目標位置進行比較。如果發現偏差,可以根據實際情況調整運動策略,以實現更精確的定位。
三、絕對定位的使用方法
在實際使用絕對定位時,需要注意以下幾點:
1.選擇合適的運動學模型:根據設備或機器人的結構特點和運動特性,選擇合適的運動學模型。不同的運動學模型可能會影響到定位精度和穩定性。
2.準確獲取當前位置信息:當前位置信息的獲取對絕對定位的精度至關重要。因此,需要選擇合適的傳感器或其他手段,確保能夠準確、實時地獲取當前位置信息。
3.考慮環境因素:在實際應用中,可能會受到環境因素的影響,如溫度、濕度、磁場等。這些因素可能會導致傳感器的測量誤差,從而影響到定位精度。因此,在使用絕對定位時,需要考慮這些環境因素,并進行相應的補償處理。
-
傳感器
+關注
關注
2553文章
51390瀏覽量
756582 -
機器人
+關注
關注
211文章
28641瀏覽量
208409
發布評論請先 登錄
相關推薦

怎樣去解決KEIL arm C51中變量和函數的絕對地址定位問題呢
51單片機C語言編程中的絕對定位問題
定位程序參數設定指令

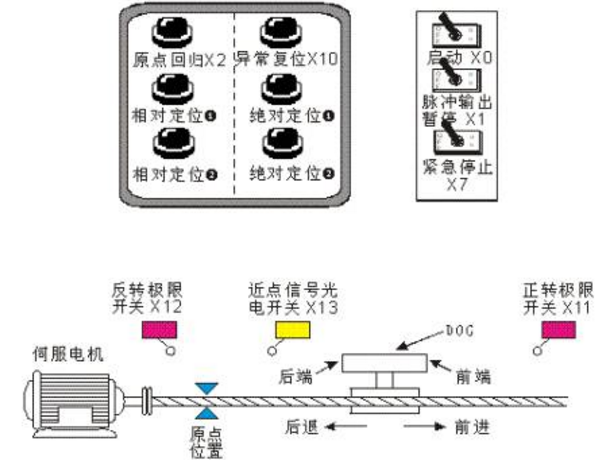
PLC控制步進電機實例,實現機構原點回歸、相對定位和絕對定位
日本富士伺服電機的絕對定位和相對定位
計算絕對值指令(ABS)?類型

西門子S7-1200 PLC定位控制教程







 工商網監
工商網監
評論