") 如何對機(jī)器人靜態(tài)TF廣播進(jìn)行管理
如何對機(jī)器人靜態(tài)TF廣播進(jìn)行管理
靜態(tài)TF廣播
我們說TF的主要作用是對坐標(biāo)系進(jìn)行管理,那就管理一個(gè)試試唄?
坐標(biāo)變換中最為簡單的應(yīng)該是相對位置不發(fā)生變化的情況,比如你家的房子在哪個(gè)位置,只要房子不拆,這個(gè)坐標(biāo)應(yīng)該就不會(huì)變化。
在機(jī)器人系統(tǒng)中也很常見,比如激光雷達(dá)和機(jī)器人底盤之間的位置關(guān)系,安裝好之后基本不會(huì)變化。
在TF中,這種情況也稱之為靜態(tài)TF變換,我們來看看在程序中該如何實(shí)現(xiàn)?
運(yùn)行效果
啟動(dòng)終端,運(yùn)行如下命令:
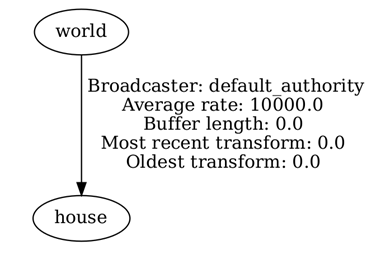
$ ros2 run learning_tf static_tf_broadcaster$ ros2 run tf2_tools view_frames
可以看到當(dāng)前系統(tǒng)中存在兩個(gè)坐標(biāo)系,一個(gè)是world,一個(gè)是house,兩者之間的相對位置不會(huì)發(fā)生改變,通過一個(gè)靜態(tài)的TF對象進(jìn)行維護(hù)。
代碼解析
來看下在代碼中是如何創(chuàng)建坐標(biāo)系并且發(fā)布靜態(tài)變換的。
learning_tf/static_tf_broadcaster.py
#!/usr/bin/env python3# -*- coding: utf-8 -*-"""@作者: 古月居(www.guyuehome.com)@說明: ROS2 TF示例-廣播靜態(tài)的坐標(biāo)變換"""import rclpy # ROS2 Python接口庫from rclpy.node import Node # ROS2 節(jié)點(diǎn)類from geometry_msgs.msg import TransformStamped # 坐標(biāo)變換消息import tf_transformations # TF坐標(biāo)變換庫from tf2_ros.static_transform_broadcaster import StaticTransformBroadcaster # TF靜態(tài)坐標(biāo)系廣播器類class StaticTFBroadcaster(Node): def __init__(self, name): super().__init__(name) # ROS2節(jié)點(diǎn)父類初始化 self.tf_broadcaster = StaticTransformBroadcaster(self) # 創(chuàng)建一個(gè)TF廣播器對象 static_transformStamped = TransformStamped() # 創(chuàng)建一個(gè)坐標(biāo)變換的消息對象 static_transformStamped.header.stamp = self.get_clock().now().to_msg() # 設(shè)置坐標(biāo)變換消息的時(shí)間戳 static_transformStamped.header.frame_id = 'world' # 設(shè)置一個(gè)坐標(biāo)變換的源坐標(biāo)系 static_transformStamped.child_frame_id = 'house' # 設(shè)置一個(gè)坐標(biāo)變換的目標(biāo)坐標(biāo)系 static_transformStamped.transform.translation.x = 10.0 # 設(shè)置坐標(biāo)變換中的X、Y、Z向的平移 static_transformStamped.transform.translation.y = 5.0 static_transformStamped.transform.translation.z = 0.0 quat = tf_transformations.quaternion_from_euler(0.0, 0.0, 0.0) # 將歐拉角轉(zhuǎn)換為四元數(shù)(roll, pitch, yaw) static_transformStamped.transform.rotation.x = quat[0] # 設(shè)置坐標(biāo)變換中的X、Y、Z向的旋轉(zhuǎn)(四元數(shù)) static_transformStamped.transform.rotation.y = quat[1] static_transformStamped.transform.rotation.z = quat[2] static_transformStamped.transform.rotation.w = quat[3] self.tf_broadcaster.sendTransform(static_transformStamped) # 廣播靜態(tài)坐標(biāo)變換,廣播后兩個(gè)坐標(biāo)系的位置關(guān)系保持不變def main(args=None): rclpy.init(args=args) # ROS2 Python接口初始化 node = StaticTFBroadcaster("static_tf_broadcaster") # 創(chuàng)建ROS2節(jié)點(diǎn)對象并進(jìn)行初始化 rclpy.spin(node) # 循環(huán)等待ROS2退出 node.destroy_node() # 銷毀節(jié)點(diǎn)對象 rclpy.shutdown()
完成代碼的編寫后需要設(shè)置功能包的編譯選項(xiàng),讓系統(tǒng)知道Python程序的入口,打開功能包的setup.py文件,加入如下入口點(diǎn)的配置:
entry_points={ 'console_scripts': [ 'static_tf_broadcaster = learning_tf.static_tf_broadcaster:main', ], },
經(jīng)過這段代碼,兩個(gè)坐標(biāo)系的變化是描述清楚了,到了使用的時(shí)候,我們又該如何查詢呢?
TF監(jiān)聽
我們再來學(xué)習(xí)下如何查詢兩個(gè)坐標(biāo)系之間的位置關(guān)系。
運(yùn)行效果
啟動(dòng)一個(gè)終端,運(yùn)行如下節(jié)點(diǎn),就可以在終端中看到周期顯示的坐標(biāo)關(guān)系了。
$ ros2 run learning_tf tf_listener

代碼解析
這個(gè)節(jié)點(diǎn)中是如何查詢坐標(biāo)關(guān)系的,我們來看下代碼
learning_tf/tf_listener.py
#!/usr/bin/env python3# -*- coding: utf-8 -*-"""@作者: 古月居(www.guyuehome.com)@說明: ROS2 TF示例-監(jiān)聽某兩個(gè)坐標(biāo)系之間的變換"""import rclpy # ROS2 Python接口庫from rclpy.node import Node # ROS2 節(jié)點(diǎn)類import tf_transformations # TF坐標(biāo)變換庫from tf2_ros import TransformException # TF左邊變換的異常類from tf2_ros.buffer import Buffer # 存儲(chǔ)坐標(biāo)變換信息的緩沖類from tf2_ros.transform_listener import TransformListener # 監(jiān)聽坐標(biāo)變換的監(jiān)聽器類class TFListener(Node): def __init__(self, name): super().__init__(name) # ROS2節(jié)點(diǎn)父類初始化 self.declare_parameter('source_frame', 'world') # 創(chuàng)建一個(gè)源坐標(biāo)系名的參數(shù) self.source_frame = self.get_parameter( # 優(yōu)先使用外部設(shè)置的參數(shù)值,否則用默認(rèn)值 'source_frame').get_parameter_value().string_value self.declare_parameter('target_frame', 'house') # 創(chuàng)建一個(gè)目標(biāo)坐標(biāo)系名的參數(shù) self.target_frame = self.get_parameter( # 優(yōu)先使用外部設(shè)置的參數(shù)值,否則用默認(rèn)值 'target_frame').get_parameter_value().string_value self.tf_buffer = Buffer() # 創(chuàng)建保存坐標(biāo)變換信息的緩沖區(qū) self.tf_listener = TransformListener(self.tf_buffer, self) # 創(chuàng)建坐標(biāo)變換的監(jiān)聽器 self.timer = self.create_timer(1.0, self.on_timer) # 創(chuàng)建一個(gè)固定周期的定時(shí)器,處理坐標(biāo)信息 def on_timer(self): try: now = rclpy.time.Time() # 獲取ROS系統(tǒng)的當(dāng)前時(shí)間 trans = self.tf_buffer.lookup_transform( # 監(jiān)聽當(dāng)前時(shí)刻源坐標(biāo)系到目標(biāo)坐標(biāo)系的坐標(biāo)變換 self.target_frame, self.source_frame, now) except TransformException as ex: # 如果坐標(biāo)變換獲取失敗,進(jìn)入異常報(bào)告 self.get_logger().info( f'Could not transform {self.target_frame} to {self.source_frame}: {ex}') return pos = trans.transform.translation # 獲取位置信息 quat = trans.transform.rotation # 獲取姿態(tài)信息(四元數(shù)) euler = tf_transformations.euler_from_quaternion([quat.x, quat.y, quat.z, quat.w]) self.get_logger().info('Get %s -- > %s transform: [%f, %f, %f] [%f, %f, %f]' % (self.source_frame, self.target_frame, pos.x, pos.y, pos.z, euler[0], euler[1], euler[2]))def main(args=None): rclpy.init(args=args) # ROS2 Python接口初始化 node = TFListener("tf_listener") # 創(chuàng)建ROS2節(jié)點(diǎn)對象并進(jìn)行初始化 rclpy.spin(node) # 循環(huán)等待ROS2退出 node.destroy_node() # 銷毀節(jié)點(diǎn)對象 rclpy.shutdown() # 關(guān)閉ROS2 Python接口
完成代碼的編寫后需要設(shè)置功能包的編譯選項(xiàng),讓系統(tǒng)知道Python程序的入口,打開功能包的setup.py文件,加入如下入口點(diǎn)的配置:
entry_points={ 'console_scripts': [ 'static_tf_broadcaster = learning_tf.static_tf_broadcaster:main', 'tf_listener = learning_tf.tf_listener:main', ], },
好啦,大家現(xiàn)在對TF的基本使用有所了解了。我們繼續(xù)挑戰(zhàn)兩只海龜跟隨的案例。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28642瀏覽量
208423 -
坐標(biāo)系
+關(guān)注
關(guān)注
0文章
29瀏覽量
7356 -
程序
+關(guān)注
關(guān)注
117文章
3795瀏覽量
81411 -
ROS
+關(guān)注
關(guān)注
1文章
280瀏覽量
17098
發(fā)布評(píng)論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論