") LQR橫向控制算法的求解
LQR橫向控制算法的求解
LQR 橫向控制算法的求解
期望的響應(yīng)特性就是 跟蹤偏差能夠快速、穩(wěn)定地趨近于零,并保持平衡,同時前輪轉(zhuǎn)角控制輸入又盡可能小,這就是一個典型的多目標(biāo)優(yōu)化最優(yōu)控制問題。
且優(yōu)化的目標(biāo)函數(shù)可以表示為跟蹤過程累計的跟蹤偏差與累計的控制輸入的加權(quán)和。
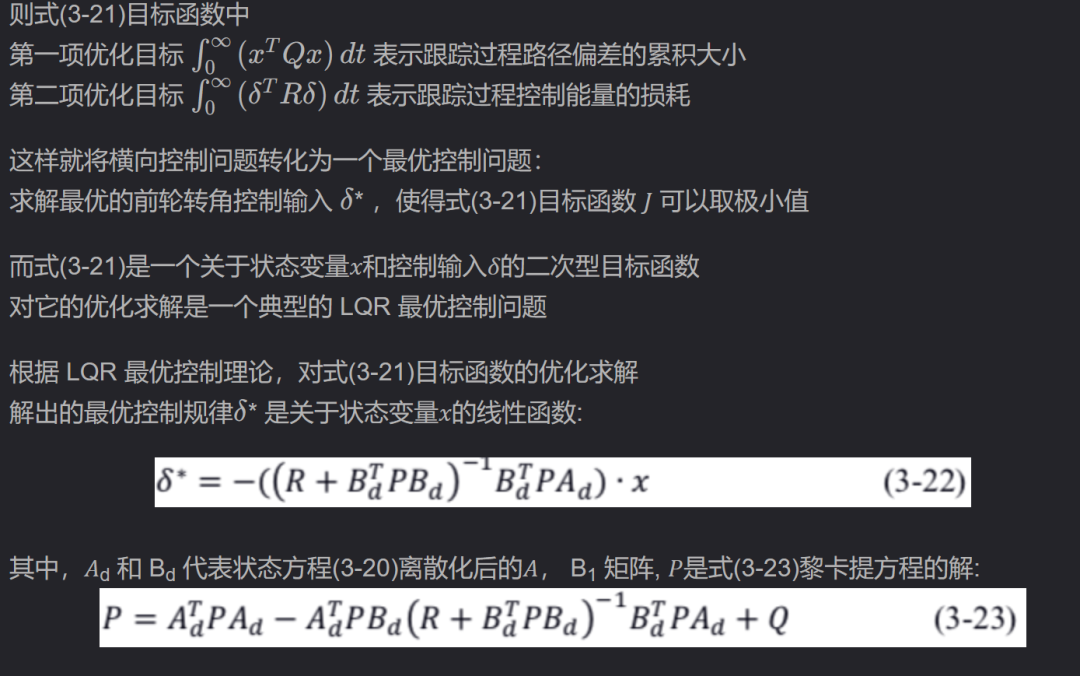
如式(3-21)所示:

其中, Q為半正定的狀態(tài)加權(quán)矩陣, R為正定的控制加權(quán)矩陣,且 Q,R通常取為對角陣
Q矩陣元素變大意味著希望跟蹤偏差能夠快速趨近于零,R矩陣元素變大意味著希望控制輸入能夠盡可能小
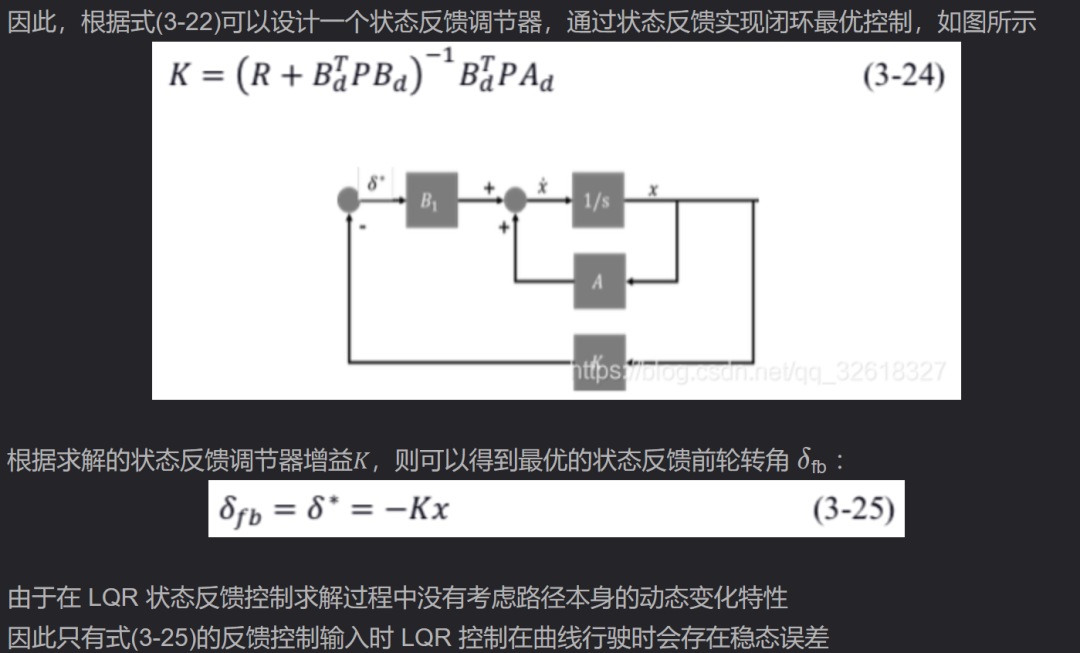
由于在 LQR 狀態(tài)反饋控制求解過程中沒有考慮路徑本身的動態(tài)變化特性,因此只有式(3-25)的反饋控制輸入時 LQR控制在曲線行駛時會存在穩(wěn)態(tài)誤差。
穩(wěn)態(tài)誤差是系統(tǒng)從一個穩(wěn)態(tài)過渡到新的穩(wěn)態(tài),或系統(tǒng)受擾動作用又重新平衡后,系統(tǒng)出現(xiàn)的偏差。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
反饋控制
+關(guān)注
關(guān)注
0文章
61瀏覽量
20979 -
無人駕駛
+關(guān)注
關(guān)注
98文章
4090瀏覽量
121014 -
LQR
+關(guān)注
關(guān)注
1文章
6瀏覽量
3159
發(fā)布評論請先 登錄
相關(guān)推薦
誰有歐***的結(jié)構(gòu)振動控制書怎么考慮時滯的lqr算法程序
誰有歐***的結(jié)構(gòu)振動控制書怎么考慮時滯的lqr(matlab)算法程序?跪求。。。
發(fā)表于 07-09 22:48
LQR線性二次調(diào)制系統(tǒng)的記錄
LQR 控制本blog主要記錄LQR 線性二次調(diào)制系統(tǒng)的,學(xué)習(xí)教程為兩個B站的教學(xué)視頻。狀態(tài)空間4-LQR控制 MATLAB官方教程視頻鏈接
發(fā)表于 08-30 08:00
一種求解關(guān)鍵路徑的新算法
通過定義節(jié)點編碼圖概念,提出一種不需要拓?fù)渑判虻?b class='flag-5'>求解關(guān)鍵路徑的新算法。該算法擴充圖的鄰接表的存儲結(jié)構(gòu),使圖的存儲與算法求解過程共享同一存儲空
發(fā)表于 04-23 10:29
?7次下載
基于LQR 的直升機最優(yōu)控制系統(tǒng)的設(shè)計Design on a
設(shè)計了直升機LQR 最優(yōu)控制系統(tǒng),并針對LQR 控制中加權(quán)矩陣Q和R 難以確定的問題,進行了試驗分析,從實際控制效果出發(fā),找出了系統(tǒng)響應(yīng)與Q
發(fā)表于 06-06 16:00
?19次下載
基于FPGA的橫向LMS算法的實現(xiàn)
橫向LMS算法是實現(xiàn)自適應(yīng)數(shù)字波束形成的基本方法之一。提出了一種用Matab/Simulink中DSP Builder模塊庫設(shè)計算法模型,然后應(yīng)用FPGA設(shè)計軟件Modelsim 、QuartusII
發(fā)表于 12-07 14:03
?23次下載
一級倒立擺的LQR控制與遺傳算法下的LQR控制算法
將LQR的算法與遺傳算法下的LQR算法相結(jié)合,得到最優(yōu)化下的轉(zhuǎn)態(tài)空間反饋矩陣
發(fā)表于 10-28 11:41
?2次下載
基于故障樹最小割集求解算法
故障樹分析廣泛應(yīng)用于核工業(yè)、航空航天和交通控制等安全攸關(guān)領(lǐng)域的安全性分析。求解故障樹的最小割集是故障樹分析的關(guān)鍵步驟。目前,對于大規(guī)模故障樹的最小割集的求解方法主要是將故障樹轉(zhuǎn)化為二元決策圖之后
發(fā)表于 11-21 16:05
?10次下載
一種求解RTVKP問題的精確算法
隨機時變背包問題(randomized time-varying knapsack problem,簡稱RTVKP)是一種動態(tài)背包問題,也是一種動態(tài)組合優(yōu)化問題,目前其求解算法主要是動態(tài)規(guī)劃的精確
發(fā)表于 01-03 10:27
?0次下載
求解#SMT問題的局部搜索算法
規(guī)模#SMT實例的求解器亟待解決.基于以上原因,設(shè)計了一種求解較大規(guī)模#SMT實例的近似求解器一一VolComputeWithLocalSearch.它在現(xiàn)有的#SMT精確求解
發(fā)表于 01-09 14:38
?0次下載
Apollo代碼學(xué)習(xí)—MPC與LQR比較
MPC(Model Predictive Control,模型預(yù)測控制)和LQR(Linear–Quadratic Regulator,線性二次調(diào)解器) 在狀態(tài)方程、控制實現(xiàn)等方面,有很多

基于車輛動力學(xué)模型的橫向控制
線性二自由度動力學(xué)模型的構(gòu)建 車輛路徑跟蹤偏差狀態(tài)方程的構(gòu)建 LQR 橫向控制算法的求解 車輛線性二自由度動力學(xué)模型 對于基于車輛動力學(xué)模型

基于車輛運動學(xué)和動力學(xué)模型的橫向控制算法
無模型的 PID 橫向控制算法參數(shù)少,簡單易用,但是由于沒有考慮車輛系統(tǒng)動力學(xué)特性及路徑本身的動態(tài)變化特性,對外界干擾的魯棒性較差。 在高速或曲率較大的彎道場景時,會出現(xiàn)較大的跟蹤誤差和“畫龍”現(xiàn)象





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論