 淺談智能車的直流調速系統
淺談智能車的直流調速系統
直流電動機的穩態轉速方程可以表示為:
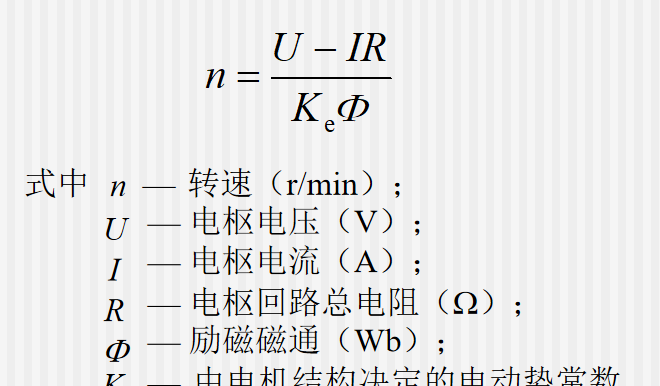
根據上式,從數學的角度可以得知,直流電機有三種調節轉速的方法:
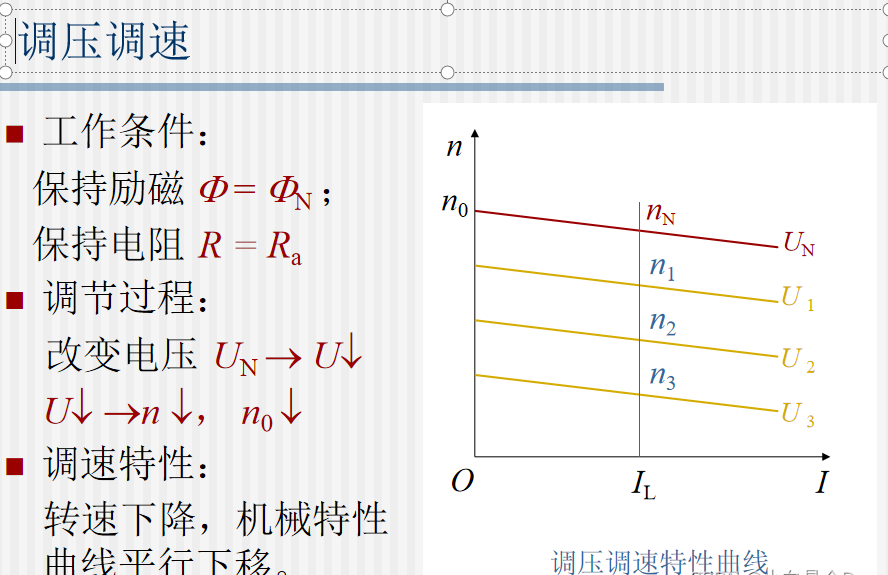
(1)調節電樞供電電壓 U。
(2)減弱勵磁磁通 φ。
(3)改變電樞回路電阻 R。
由于智能車比賽中的電機已經指定了,那么方法2,3顯然不可取,剩下的就是方法1了,所以智能車的速度控制都是采取的變壓調速。
橋式可逆PWM變換器
這個直流調速系統知識點很多,因為智能車中幾乎都是運用的PWM加全橋,因此此處僅解析橋式可逆PWM變換器。
可逆PWM變換器主電路有多種形式,最常用的是橋式(亦稱H形)電路如下圖所示:
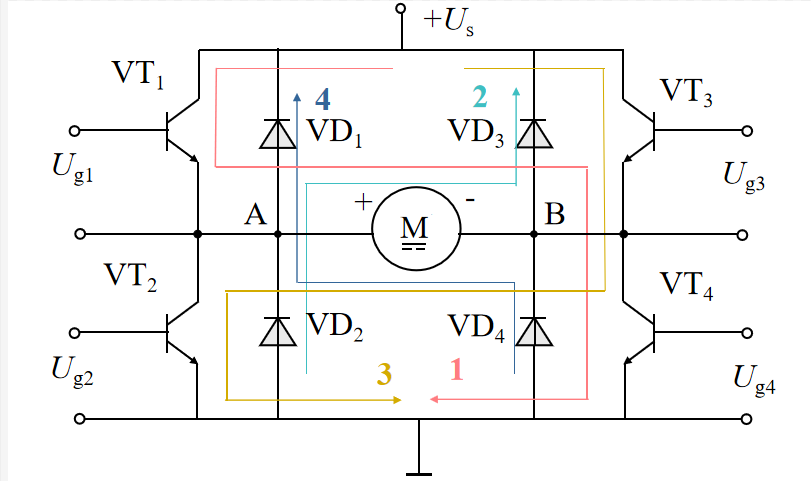
電動機M兩端電壓的極性隨開關器件柵極驅動電壓極性的變化而改變,其控制方式有雙極式、單極式、受限單極式等多種,這里分析雙極式控制的可逆PWM變換器,需要注意的是智能車中多使用的是單極性控制,大致過程與雙極性相似。
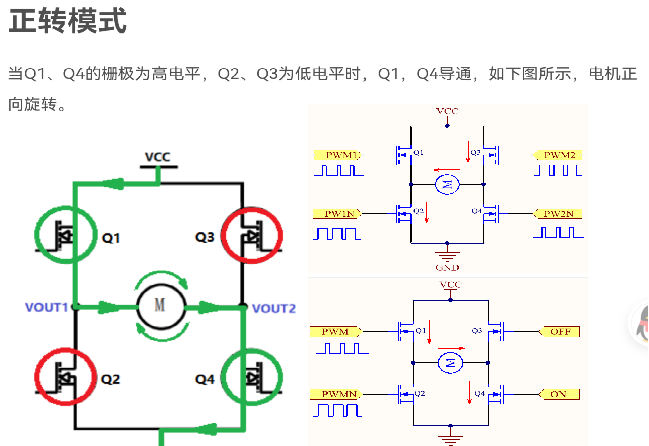
(1)正向運行
第1階段,在 0 ≤ t ≤ ton 期間, Ug1 、 Ug4為正, VT1 、 VT4導通, Ug2 、 Ug3為負,VT2 、 VT3截止,電流id 沿回路1流通,電動機M兩端電壓UAB = +Us ;
第2階段,在ton ≤ t ≤ T期間, Ug1 、 Ug4為負, VT1 、 VT4截止, VD2 、 VD3續流, 并鉗位使VT2 、VT3保持截止,電流 id 沿回路2流通,電動機M兩端電壓UAB = –Us ;
(2)反向運行
第1階段,在 0 ≤ t ≤ ton 期間, Ug2 、 Ug3為負,VT2 、 VT3截止, VD1 、 VD4 續流,并鉗位使 VT1 、VT4截止,電流 –id 沿回路4流通,電動機M兩端電壓UAB = +Us ;
第2階段,在ton ≤ t ≤ T 期間, Ug2 、 Ug3 為正, VT2 、 VT3導通, Ug1 、 Ug4為負,使VT1 、VT4保持截止,電流 – id 沿回路3流通,電動機M兩端電壓UAB = – Us ;
-
電機控制
+關注
關注
3540文章
1897瀏覽量
269264 -
直流電機
+關注
關注
36文章
1710瀏覽量
70413 -
PWM
+關注
關注
114文章
5198瀏覽量
214889 -
智能車
+關注
關注
21文章
404瀏覽量
77066
發布評論請先 登錄
相關推薦
智能車設計基礎
樹莓派智能車AlphaBot系列教程
智能車系統解決方案總體設計
基于光電管路徑識別的智能車系統設計
智能車直流電機的設計及多種方案比較(電路圖、調速源代碼)
第十五屆智能車入門淺談 精選資料分享
基于單片機的智能車設計
智能車競賽淺談——圖像篇
基于光電管路徑識別的智能車系統設計

飛思卡爾智能車控制系統設計






 工商網監
工商網監
評論