") 驅動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(2)----配置濾波器
驅動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(2)----配置濾波器
工作模式
在LSM6DS3TR-C中,加速度計和陀螺儀可以獨立地開啟/關閉,并且可以擁有不同的ODR和功耗模式。 LSM6DS3TR-C有三種可用的操作模式:
● 僅加速度計活動,陀螺儀處于斷電狀態(tài)
● 僅陀螺儀活動,加速度計處于斷電狀態(tài)
● 加速度計和陀螺儀傳感器同時活動,ODR獨立
最近在弄ST和瑞薩RA的課程,需要樣片的可以加群申請:615061293 。

視頻教學
https://www.bilibili.com/video/BV19P411Q7fP/
樣品申請
https://www.wjx.top/vm/OhcKxJk.aspx#
完整代碼下載
https://download.csdn.net/download/qq_24312945/87921267
設置加速度速率
設置加速度速率可以配置CTRL1_XL (10h)寄存器,ODR_XL [3:0]可以設置速率。

參考例程序中對應的設置加速度速率程序函數(shù),如下所示。

設置加速度速率代碼如下所示。
#define LSM6DS3TRC_CTRL1_XL 0x10
//Linear acceleration out data rate
#define LSM6DS3TRC_ACC_RATE_0 0x00
#define LSM6DS3TRC_ACC_RATE_1HZ6 0xB0
#define LSM6DS3TRC_ACC_RATE_12HZ5 0x10
#define LSM6DS3TRC_ACC_RATE_26HZ 0x20
#define LSM6DS3TRC_ACC_RATE_52HZ 0x30
#define LSM6DS3TRC_ACC_RATE_104HZ 0x40
#define LSM6DS3TRC_ACC_RATE_208HZ 0x50
#define LSM6DS3TRC_ACC_RATE_416HZ 0x60
#define LSM6DS3TRC_ACC_RATE_833HZ 0x70
#define LSM6DS3TRC_ACC_RATE_1660HZ 0x80
#define LSM6DS3TRC_ACC_RATE_3330HZ 0x90
#define LSM6DS3TRC_ACC_RATE_6660HZ 0xA0
/***************************************************************************************************************
LSM6DS3TRC Set accelerometer data rate
****************************************************************************************************************/
void LSM6DS3TRC_Set_Accelerometer_Rate(uint8_t rate)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
buf[0] |= rate;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
}
設置速率為12.5Hz的波形如下所示. 
設置角速度速率
設置角速度速率可以配置CTRL2_G (11h))寄存器,ODR_G [3:0]可以設置速率。

參考例程序中對應的設置角速度速率程序函數(shù),如下所示。

設置角速度速率代碼如下所示。
#define LSM6DS3TRC_CTRL2_G 0x11
//Linear gyroscope out data rate
#define LSM6DS3TRC_GYR_RATE_0 0x00
#define LSM6DS3TRC_GYR_RATE_1HZ6 0xB0
#define LSM6DS3TRC_GYR_RATE_12HZ5 0x10
#define LSM6DS3TRC_GYR_RATE_26HZ 0x20
#define LSM6DS3TRC_GYR_RATE_52HZ 0x30
#define LSM6DS3TRC_GYR_RATE_104HZ 0x40
#define LSM6DS3TRC_GYR_RATE_208HZ 0x50
#define LSM6DS3TRC_GYR_RATE_416HZ 0x60
#define LSM6DS3TRC_GYR_RATE_833HZ 0x70
#define LSM6DS3TRC_GYR_RATE_1660HZ 0x80
#define LSM6DS3TRC_GYR_RATE_3330HZ 0x90
#define LSM6DS3TRC_GYR_RATE_6660HZ 0xA0
/***************************************************************************************************************
LSM6DS3TRC Set gyroscope data rate
****************************************************************************************************************/
void LSM6DS3TRC_Set_Gyroscope_Rate(uint8_t rate)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL2_G, buf, 1);
buf[0] |= rate;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL2_G, buf, 1);
}
設置速率為12.5Hz的波形如下所示。

設置加速度量程選擇
設置加速度量程可以配置CTRL1_XL (10h)寄存器的FS_XL,F(xiàn)S_XL [1:0]可以設置量程。

參考例程序中對應的設置加速度量程程序函數(shù),如下所示。

#define LSM6DS3TRC_CTRL1_XL 0x10
//Accelerometer full-scale.
#define LSM6DS3TRC_ACC_FSXL_2G 0x00
#define LSM6DS3TRC_ACC_FSXL_16G 0x04
#define LSM6DS3TRC_ACC_FSXL_4G 0x08
#define LSM6DS3TRC_ACC_FSXL_8G 0x0C
/***************************************************************************************************************
LSM6DS3TRC Set accelerometer full-scale selection.
****************************************************************************************************************/
void LSM6DS3TRC_Set_Accelerometer_Fullscale(uint8_t value)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
buf[0] |= value;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
}
設置速率為2g的波形如下所示。

設置角速度量程選擇
設置角速度量程可以配置CTRL2_G (11h)寄存器的FS_G,F(xiàn)S_G [1:0]可以設置量程。

參考例程序中對應的設置角速度量程程序函數(shù),如下所示。

#define LSM6DS3TRC_CTRL2_G 0x11
//Gyroscope full-scale.
#define LSM6DS3TRC_GYR_FSG_245 0x00
#define LSM6DS3TRC_GYR_FSG_500 0x04
#define LSM6DS3TRC_GYR_FSG_1000 0x08
#define LSM6DS3TRC_GYR_FSG_2000 0x0C
/***************************************************************************************************************
LSM6DS3TRC Set gyroscope full-scale selection.
****************************************************************************************************************/
void LSM6DS3TRC_Set_Gyroscope_Fullscale(uint8_t value)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL2_G, buf, 1);
buf[0] |= value;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL2_G, buf, 1);
}
設置陀螺儀量程為2000的波形如下所示。

設置加速度參數(shù)
加速度帶寬這個設置是用來確定加速度計數(shù)據(jù)的更新速度的。更高的帶寬允許更高的頻率信號通過,這意味著加速度計可以更快地響應運動的變化。
這個設置特別適用于加速度計的輸出數(shù)據(jù)速率(ODR)大于或等于1.67kHz的情況。這是因為在這種高數(shù)據(jù)速率下,可能需要更寬的帶寬來確保加速度計能夠準確地測量快速變化的運動。例如,在高速運動的跟蹤或者高精度的導航應用中,這個設置可能會很有用。

參考例程序中對應的設置加速度帶寬選擇程序函數(shù),如下所示。


使用的函數(shù)如下。
#define LSM6DS3TR_C_XL_ANA_BW_400Hz 1
#define LSM6DS3TR_C_XL_LOW_NOISE_LP_ODR_DIV_100 0x11
/* Configure filtering chain(No aux interface) */
/* Accelerometer - analog filter */
lsm6ds3tr_c_xl_filter_analog_set(&dev_ctx,
LSM6DS3TR_C_XL_ANA_BW_400Hz);
/* Accelerometer - LPF1 path ( LPF2 not used )*/
//lsm6ds3tr_c_xl_lp1_bandwidth_set(&dev_ctx, LSM6DS3TR_C_XL_LP1_ODR_DIV_4);
/* Accelerometer - LPF1 + LPF2 path */
lsm6ds3tr_c_xl_lp2_bandwidth_set(&dev_ctx,
LSM6DS3TR_C_XL_LOW_NOISE_LP_ODR_DIV_100);
對于CTRL1_XL (10h)配置,主要有如下1個函數(shù)。 bw0_xl寫入1,通過在CTRL1_XL寄存器中將BW0_XL位設置為1來將模擬濾波器的帶寬設置為400 Hz。
ctrl1_xl.bw0_xl = (uint8_t) val;
對于CTRL8_XL(17h)配置,主要有如下4個函數(shù)。
((uint8_t) val & 0x10U) >> 4為(0x11 & 0x10)>> 4即ctrl8_xl.input_composite寫入1;
ctrl8_xl.hpcf_xl = (uint8_t) val & 0x03U為(0x11 & 0x03)即ctrl8_xl.hpcf_xl寫入1;
ctrl8_xl.lpf2_xl_en = 1即lpf2_xl_en寫入1; ctrl8_xl.hp_slope_xl_en = 0即hp_slope_xl_en寫入0;
ctrl8_xl.input_composite = ((uint8_t) val & 0x10U) > > 4;
ctrl8_xl.hpcf_xl = (uint8_t) val & 0x03U;
ctrl8_xl.lpf2_xl_en = 1;
ctrl8_xl.hp_slope_xl_en = 0;
線性加速度濾波器寄存器在CTRL8_XL (17h)中,這些參數(shù)在CTRL8_XL寄存器中定義了加速度計的一些濾波器設置。以下是這些參數(shù)的區(qū)別:
LPF2_XL_EN - 加速度計低通濾波器LPF2的選擇。
HPCF_XL[1:0] - 加速度計LPF2和高通濾波器的配置和截止設置。
HP_REF_MODE - 啟用高通濾波器參考模式。默認值:0(0:禁用;1:啟用(1))。啟用后,必須丟棄第一個輸出數(shù)據(jù)。
INPUT_COMPOSITE - 復合濾波器輸入選擇。默認值:0(0:將ODR/2低通濾波器輸出發(fā)送到復合濾波器(默認);1:將ODR/4低通濾波器輸出發(fā)送到復合濾波器)。
HP_SLOPE_XL_EN - 加速度計斜率濾波器/高通濾波器選擇。
LOW_PASS_ON_6D - 6D功能上的LPF2選擇。
降低采樣率可以減少傳感器生成的數(shù)據(jù)量,從而降低功耗和數(shù)據(jù)處理要求。這在某些應用場景中可能是有用的,特別是對于要求較低的數(shù)據(jù)更新率或對存儲和傳輸資源有限的情況下。

模擬濾波器帶寬的設置:
當加速度計的采樣率(ODR)大于等于1666 Hz時,可以通過在CTRL1_XL寄存器中將BW0_XL位設置為1來將模擬濾波器的帶寬設置為400 Hz。
數(shù)字低通濾波器LPF1的選擇:
LPF1數(shù)字低通濾波器提供兩個輸出,它們具有不同的截止頻率。可以通過在CTRL1_XL寄存器的LPF1_BW_SEL位和CTRL8_XL寄存器的INPUT_COMPOSITE位來選擇所需的LPF1輸出。這些位的設置將確定LPF1輸出的截止頻率。

配置CTRL8_XL (17h)為LSM6DS3TRC_ACC_LOW_PASS_ODR_100 0xA8(1010 1000),流程圖如下所示。

#define LSM6DS3TRC_CTRL1_XL 0x10
#define LSM6DS3TRC_CTRL8_XL 0x17
//Accelerometer analog chain bandwidth
#define LSM6DS3TRC_ACC_BW0XL_1500HZ 0x00
#define LSM6DS3TRC_ACC_BW0XL_400HZ 0x01
//Accelerometer bandwidth selection
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_50 0x88
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_100 0xA8
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_9 0xC8
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_400 0xE8
/***************************************************************************************************************
LSM6DS3TRC Set accelerometer analog chain bandwidth.
****************************************************************************************************************/
void LSM6DS3TRC_Set_Accelerometer_Bandwidth(uint8_t BW0XL, uint8_t ODR)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
buf[0] |= BW0XL;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL8_XL, buf, 1);
buf[0] |= ODR;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL8_XL, buf, 1);
}
設置加速度的刷新速度為400Hz和高通濾波器的截止頻率被設置為加速度計的輸出數(shù)據(jù)速率的百分之一的波形如下所示。

陀螺儀帶寬配置
陀螺儀的帶寬 在LSM6DS3TR-C器件中,陀螺儀濾波鏈取決于所使用的連接方式。
陀螺儀濾波鏈配置如下圖所示。陀螺儀數(shù)字鏈)。這是一個三級的級聯(lián)濾波器:一個可選數(shù)字高通濾波器(HPF),一個可選數(shù)字低通濾波器(LPF1)和一個數(shù)字低通 過濾器(LPF2)。

參考程序配置陀螺儀帶寬代碼如下所示。

使用的函數(shù)如下。
#define LSM6DS3TR_C_HP_260mHz_LP1_STRONG 0xA8
/* Gyroscope - filtering chain */
lsm6ds3tr_c_gy_band_pass_set(&dev_ctx,
LSM6DS3TR_C_HP_260mHz_LP1_STRONG);
對于CTRL7_G (16h)配置,主要有如下2個函數(shù)。
((uint8_t)val & 0x30U) >> 4為(0xA8 & 0x30)>> 4即ctrl7_g.hpm_g寫入10;
((uint8_t)val & 0x80U) >> 7為(0xA8 & 0x80)>> 7即ctrl7_g.hp_en_g寫入1;
ctrl7_g.hpm_g = ((uint8_t)val & 0x30U) > > 4;
ctrl7_g.hp_en_g = ((uint8_t)val & 0x80U) > > 7;
對于CTRL6_G (15h)配置,主要有如下1個函數(shù)。
(uint8_t)val & 0x03U為(0xA8 & 0x03)即ctrl6_c.ftype寫入00。
ctrl6_c.ftype = (uint8_t)val & 0x03U;
對于CTRL4_G (13h)配置,主要有如下1個函數(shù)。
((uint8_t)val & 0x08U) >> 3為(0xA8 & 0x08)>> 3即ctrl4_c.lpf1_sel_g寫入1。
ctrl4_c.lpf1_sel_g = ((uint8_t)val & 0x08U) > > 3;
設置角速度控制寄存器可以配置CTRL7_G (16h),通過將CTRL7_G寄存器的HP_EN_G位設置為1,可以使能數(shù)字HP濾波器。同時G_HM_MODE默認情況下為0,即開啟高性能模式。
數(shù)字高壓濾波器截止頻率可以通過CTRL7_G寄存器的HPM_G[1:0]字段來選擇,如下表所示,這里選擇配置為10,即260mHz。

//CTRL7_G register
#define LSM6DS3TRC_CTRL7_G_HM_MODE_ENABLE 0x00
#define LSM6DS3TRC_CTRL7_G_HM_MODE_DISABLE 0x80
#define LSM6DS3TRC_CTRL7_G_HP_EN_DISABLE 0x00
#define LSM6DS3TRC_CTRL7_G_HP_EN_ENABLE 0x40
#define LSM6DS3TRC_CTRL7_G_HPM_16MHZ 0x00
#define LSM6DS3TRC_CTRL7_G_HPM_65MHZ 0x10
#define LSM6DS3TRC_CTRL7_G_HPM_260MHZ 0x20
#define LSM6DS3TRC_CTRL7_G_HPM_1HZ04 0x30
#define LSM6DS3TRC_CTRL7_G_ROUNDING_STATUS_DISABLE 0x04
#define LSM6DS3TRC_CTRL7_G_ROUNDING_STATUS_ENABLE 0x00
/***************************************************************************************************************
LSM6DS3TRC Set register 7
****************************************************************************************************************/
void LSM6DS3TRC_Set_Register7(uint8_t reg7)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL7_G, buf, 1);
buf[0] |= reg7;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL7_G, buf, 1);
}
這里關閉高性能操作模式以及打開陀螺儀數(shù)字HP濾波器,截止頻率選擇260 mHz的波形如下所示。
#define LSM6DS3TRC_CTRL7_G_HP_EN_ENABLE 0x40
#define LSM6DS3TRC_CTRL7_G_HPM_260MHZ 0x20
LSM6DS3TRC_Set_Register7(LSM6DS3TRC_CTRL7_G_HP_EN_ENABLE | LSM6DS3TRC_CTRL7_G_HPM_260MHZ);

CTRL6_C寄存器主要用于配置陀螺儀的低通濾波器(LPF1)的帶寬選擇。通過修改FTYPE[1:0]的值,您可以選擇不同的陀螺儀低通濾波器帶寬。
FTYPE[1:0] - 陀螺儀的低通濾波器 (LPF1) 帶寬選擇。表68顯示了可選的帶寬值。

#define LSM6DS3TRC_CTRL6_C 0x15
//CTRL6_C register
#define LSM6DS3TRC_CTRL6_C_EDGE_TRIGGER 0x80
#define LSM6DS3TRC_CTRL6_C_LEVEL_TRIGGER 0x40
#define LSM6DS3TRC_CTRL6_C_LEVEL_LATCHED 0x60
#define LSM6DS3TRC_CTRL6_C_LEVEL_FIFO 0xC0
#define LSM6DS3TRC_CTRL6_C_XL_HM_MODE_ENABLE 0x00
#define LSM6DS3TRC_CTRL6_C_XL_HM_MODE_DISABLE 0x10
#define LSM6DS3TRC_CTRL6_C_FTYPE_1 0x00
#define LSM6DS3TRC_CTRL6_C_FTYPE_2 0x01
#define LSM6DS3TRC_CTRL6_C_FTYPE_3 0x02
#define LSM6DS3TRC_CTRL6_C_FTYPE_4 0x03
/***************************************************************************************************************
LSM6DS3TRC Set register 6
****************************************************************************************************************/
void LSM6DS3TRC_Set_Register6(uint8_t reg6)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL6_C, buf, 1);
buf[0] |= reg6;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL6_C, buf, 1);
}
設置FTYPE[1:0]為00波形如下所示。
LSM6DS3TRC_Set_Register6(LSM6DS3TRC_CTRL6_C_FTYPE_1);

"LPF1_SEL_G"參數(shù)用于啟用或禁用陀螺儀的數(shù)字低通濾波器1(LPF1)。如果設為1,則該濾波器啟用;如果設為0,則該濾波器禁用,這里需要對LPF1_SEL_G 配置為1打開。

#define LSM6DS3TRC_CTRL4_C 0x13
//CTRL4_C register
#define LSM6DS3TRC_CTRL4_DEN_XL_EN_DISABLE 0x00
#define LSM6DS3TRC_CTRL4_DEN_XL_EN_ENABLE 0x80
#define LSM6DS3TRC_CTRL4_SLEEP_ENABLE 0x40
#define LSM6DS3TRC_CTRL4_SLEEP_DISABLE 0x00
#define LSM6DS3TRC_CTRL4_DEN_DRDY_INT1_DISBALE 0x00
#define LSM6DS3TRC_CTRL4_DEN_DRDY_INT1_ENABLE 0x20
#define LSM6DS3TRC_CTRL4_DRDY_MASK_DISABLE 0x00
#define LSM6DS3TRC_CTRL4_DRDY_MASK_ENABLE 0x08
#define LSM6DS3TRC_CTRL4_I2C_DISABLE 0x04
#define LSM6DS3TRC_CTRL4_I2C_ENABLE 0x00
#define LSM6DS3TRC_CTRL4_LPF1_SELG_ENABLE 0x02
#define LSM6DS3TRC_CTRL4_LPF1_SELG_DISABLE 0x00
/***************************************************************************************************************
LSM6DS3TRC Set register 6
****************************************************************************************************************/
void LSM6DS3TRC_Set_Register4(uint8_t reg4)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL4_C, buf, 1);
buf[0] |= reg4;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL4_C, buf, 1);
}
使能低通濾波器波形如下所示。
LSM6DS3TRC_Set_Register4(LSM6DS3TRC_CTRL4_LPF1_SELG_ENABLE);
 總的配置流程如下所示。
總的配置流程如下所示。

陀螺儀初始化配置
/***************************************************************************************************************
LSM6DS3TRC Init
****************************************************************************************************************/
bool LSM6DS3TRC_Init(uint8_t mode)
{
lsm6ds3trc_mode = mode;
if (LSM6DS3TRC_GetChipID() == false)
return false;
//reboot and reset register
LSM6DS3TRC_Reset();
//enable Block Data Update
LSM6DS3TRC_Set_BDU(true);
//Set Data Rate
LSM6DS3TRC_Set_Accelerometer_Rate(LSM6DS3TRC_ACC_RATE_12HZ5);
LSM6DS3TRC_Set_Gyroscope_Rate(LSM6DS3TRC_GYR_RATE_12HZ5);
//Set full-scale selection.
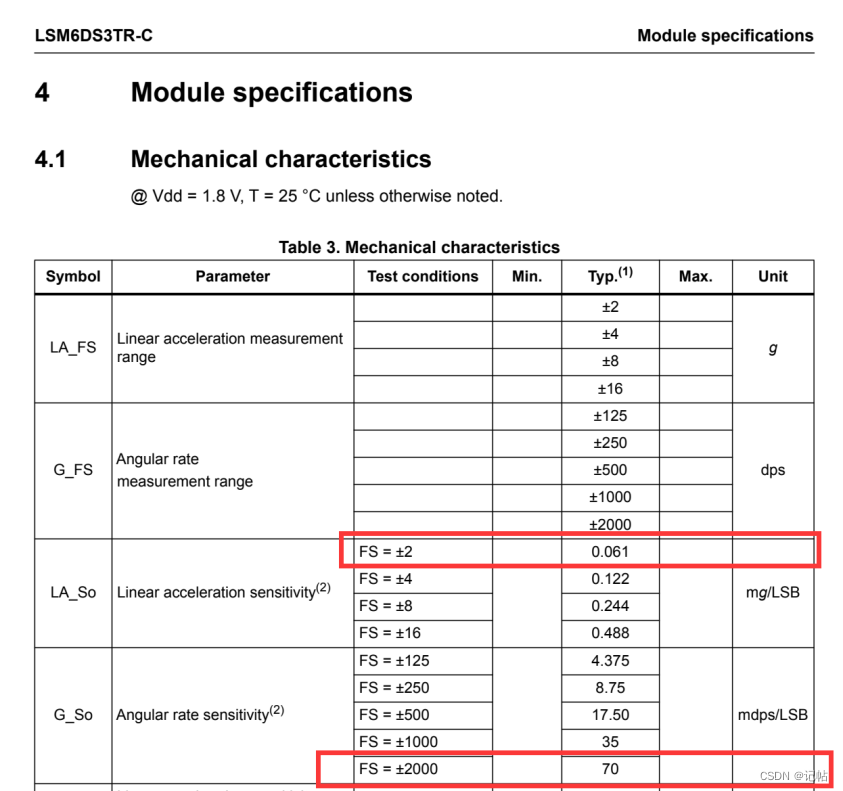
LSM6DS3TRC_Set_Accelerometer_Fullscale(LSM6DS3TRC_ACC_FSXL_2G);
LSM6DS3TRC_Set_Gyroscope_Fullscale(LSM6DS3TRC_GYR_FSG_2000);
//set accelerometer analog chain bandwidth.
LSM6DS3TRC_Set_Accelerometer_Bandwidth(LSM6DS3TRC_ACC_BW0XL_400HZ, LSM6DS3TRC_ACC_LOW_PASS_ODR_100);
LSM6DS3TRC_Set_Register7(LSM6DS3TRC_CTRL7_G_HP_EN_ENABLE | LSM6DS3TRC_CTRL7_G_HPM_260MHZ);
LSM6DS3TRC_Set_Register6(LSM6DS3TRC_CTRL6_C_FTYPE_1);
LSM6DS3TRC_Set_Register4(LSM6DS3TRC_CTRL4_LPF1_SELG_ENABLE);
if (LSM6DS3TRC_GetChipID() == false)
return false;
return true;
}
審核編輯 黃宇
-
濾波器
+關注
關注
161文章
7862瀏覽量
178936 -
mems
+關注
關注
129文章
3958瀏覽量
191107 -
陀螺儀
+關注
關注
44文章
793瀏覽量
98981 -
數(shù)據(jù)采集
+關注
關注
39文章
6255瀏覽量
114053 -
運動檢測
+關注
關注
0文章
34瀏覽量
12636
發(fā)布評論請先 登錄
相關推薦
驅動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(1)----獲取ID

驅動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(6)----FIFO數(shù)據(jù)讀取與配置

lsm6ds3tr-c傳感器集合模式無法使用的原因?
LSM6DS3TR-C使用時工作電流比datasheet上大很多是什么原因?
請問LSM6DS3TR和LSM6DS3TR-C兩個型號能否完全兼容?
LSM6DS3TR-C數(shù)據(jù)讀取異常是安利的問題?怎么處理?
LSM6DS3TR-C的FIFO讀取數(shù)據(jù)出錯是什么原因造成的?怎么解決?
供應LSM6DSLTR LSM6DSL 傳感器 LSM6DSMTR LSM6DSM
LSM6DS3TR-C的低功耗模式和高性能模式有什么區(qū)別
驅動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(3)----獲取傳感器數(shù)據(jù)
驅動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(4)----上報匿名上位機實現(xiàn)可視化
驅動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(5)----姿態(tài)解算






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論