") AUTOSAR中CAN信號(hào)是如何觸發(fā)COM回調(diào)的呢?
AUTOSAR中CAN信號(hào)是如何觸發(fā)COM回調(diào)的呢?
在A(yíng)UTOSAR中,COM模塊提供了兩種機(jī)制來(lái)處理接收到的PDU:ComRxPduCallout和ComNotification
在CAN驅(qū)動(dòng)中,回調(diào)函數(shù)通常是通過(guò)中斷或輪詢(xún)的方式觸發(fā)的。當(dāng)CAN控制器接收或發(fā)送CAN數(shù)據(jù)幀時(shí),CAN控制器會(huì)產(chǎn)生相應(yīng)的中斷或狀態(tài)變化,在中斷服務(wù)例程(ISR)中或輪詢(xún)循環(huán)中,CAN驅(qū)動(dòng)會(huì)調(diào)用相應(yīng)的回調(diào)函數(shù)來(lái)處理這些CAN事件。
第一種回調(diào),可以按照收到信號(hào)的順序觸發(fā)COM層的回調(diào),因?yàn)槭盏降男盘?hào)會(huì)存在fifo里,這就可以按照順序觸發(fā)。
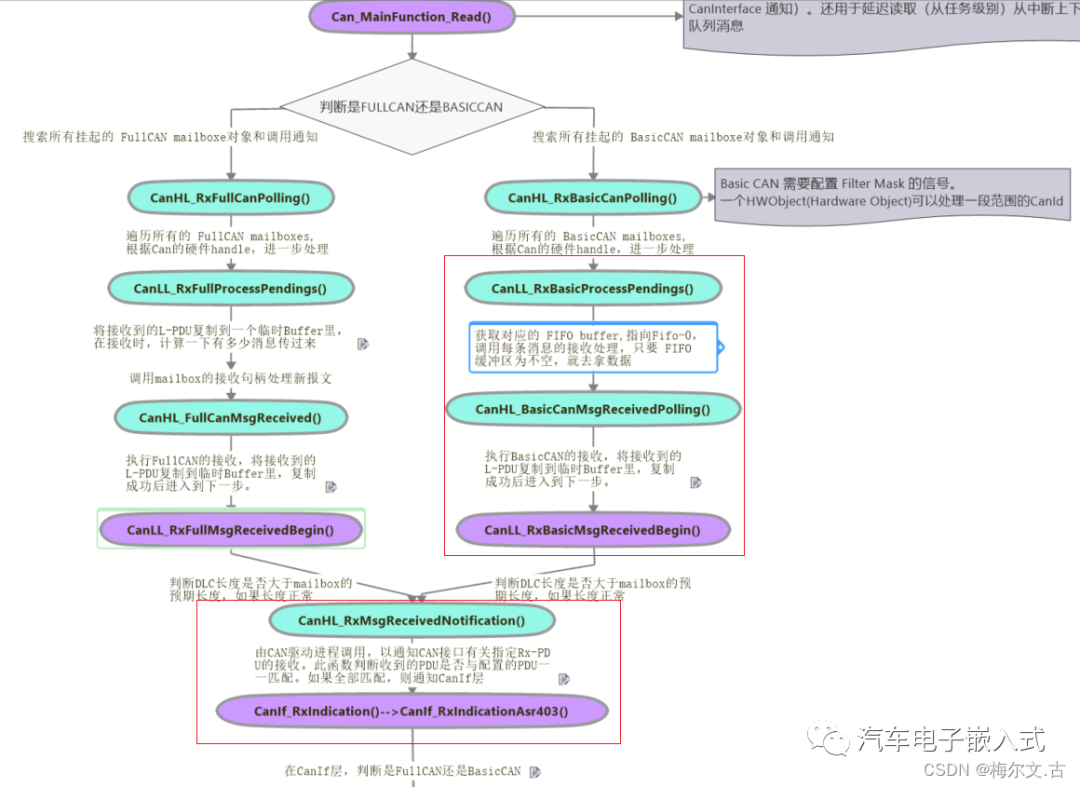
先說(shuō)結(jié)論:當(dāng)Can_MainFunction_Read 處理接收到的消息時(shí),CanIf層將調(diào)用PduR層的PduR_CanIfRxIndication 函數(shù)。然后,PduR層將該消息路由到COM層,并調(diào)用Com_RxIndication 函數(shù)。最后,當(dāng)COM層處理接收到的消息時(shí),它將觸發(fā)配置的回調(diào)函數(shù)。
為了在接收到CAN消息時(shí)觸發(fā)COM層的回調(diào),需要遵循以下步驟:
配置CanIf層:確保在CanIf層為接收到的CAN消息配置了相應(yīng)的CanIfRxPdu。這包括為其指定一個(gè)PduId,并將其與期望的CAN ID 和數(shù)據(jù)長(zhǎng)度相關(guān)聯(lián)。
配置PduR層:在PduR層,創(chuàng)建一個(gè)路由從CanIf層到Com層。這可以通過(guò)在PduR中定義PduRRoutingPath并關(guān)聯(lián)CanIf的PduId 和Com層的PduId 來(lái)實(shí)現(xiàn)。
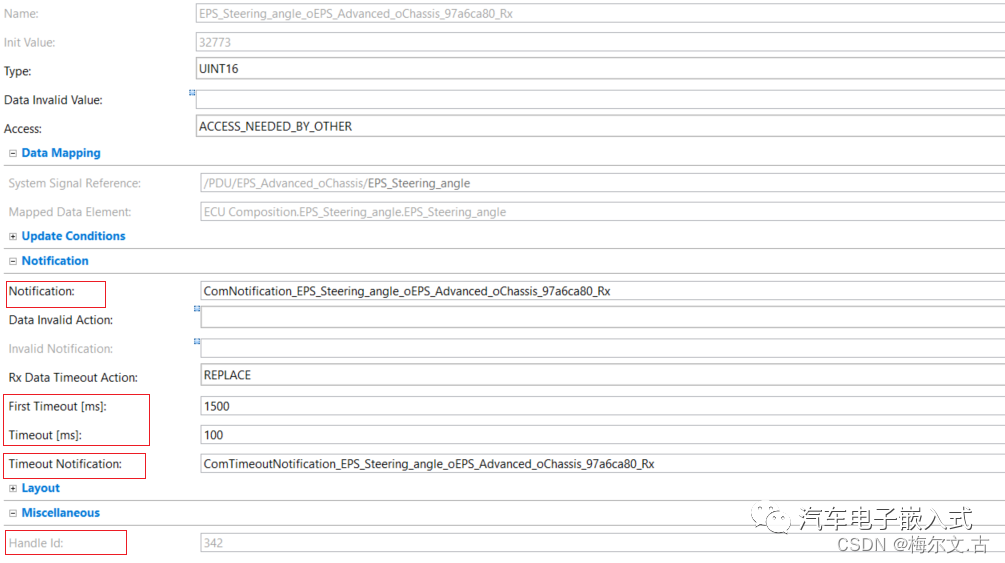
配置COM層:在COM層,為接收到的CAN消息定義一個(gè)接收IPDU,并指定一個(gè)回調(diào)函數(shù)。這個(gè)回調(diào)函數(shù)將在接收到新消息時(shí)被調(diào)用。通常,回調(diào)函數(shù)在接收到消息后會(huì)對(duì)其進(jìn)行處理,例如將數(shù)據(jù)傳輸?shù)綉?yīng)用程序。

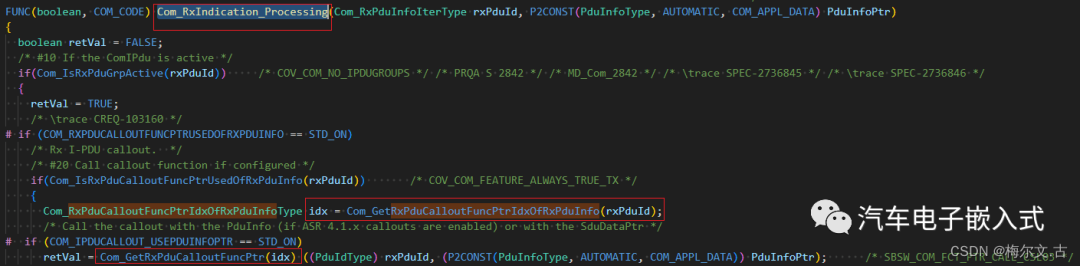
這種回調(diào)是通過(guò)COM收到CAN的PduID,遍歷一個(gè)數(shù)組,之后根據(jù)返回的數(shù)字idx再去遍歷回調(diào)數(shù)組,根據(jù)idx來(lái)判斷要執(zhí)行哪個(gè)回調(diào),這個(gè)函數(shù)的執(zhí)行是在 Com_RxIndication 里執(zhí)行的。
通過(guò)davinci配置可以看出,CAN Controller中RXprocessing是polling模式,那么callout的回調(diào)觸發(fā)是在polling模式下觸發(fā);

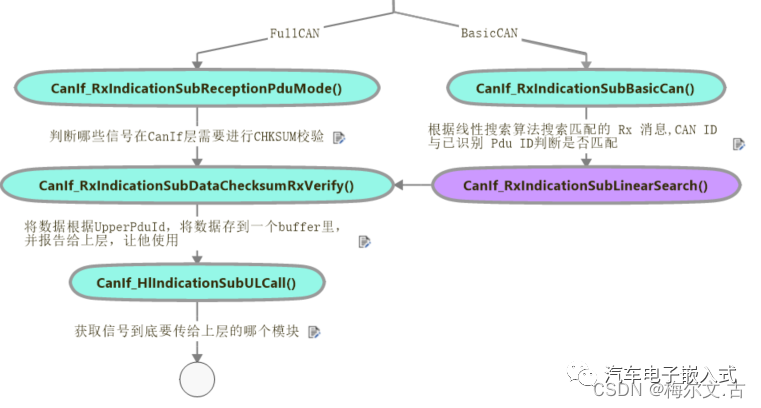
也就是調(diào)用的是下面這兩個(gè)函數(shù),注意根據(jù)配置要區(qū)分Basic CAN和Full CAN;

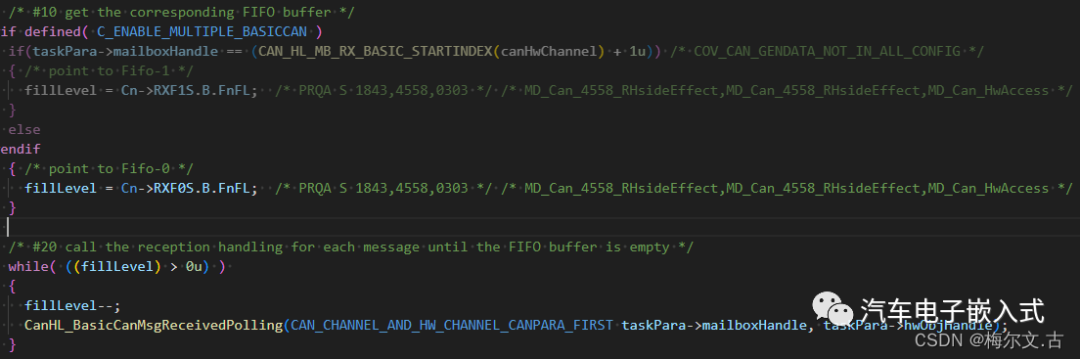
假設(shè),現(xiàn)在進(jìn)來(lái)的信號(hào)是通過(guò)Basic can進(jìn)來(lái)的,在Polling模式下,Basic CAN模塊是通過(guò)輪詢(xún)CAN控制器中的接收緩沖區(qū)(mailBox)來(lái)接收CAN數(shù)據(jù)幀,【也就是如果是報(bào)文如果在FilterMask里的,數(shù)據(jù)可以通過(guò)CAN傳給canif,否則,不管】

在這個(gè)過(guò)程中,當(dāng)CAN控制器接收到一個(gè)CAN數(shù)據(jù)幀時(shí),CAN控制器會(huì)將CAN數(shù)據(jù)幀存儲(chǔ)在FIFO Buffer中。Basic CAN模塊在輪詢(xún)CAN控制器的接收緩沖區(qū)時(shí),會(huì)從FIFO Buffer中讀取CAN數(shù)據(jù)幀,并將CAN數(shù)據(jù)幀中的信號(hào)解析出來(lái)。解析后的信號(hào)將被傳遞到CanIf模塊中,以便上層模塊進(jìn)行處理。
將接收到的CAN數(shù)據(jù)幀解析的信號(hào)傳遞到CanIf模塊;
之后將數(shù)據(jù)在傳到PDUR,之后在傳到COM。

第二種回調(diào),ComNotification是一個(gè)接口,用于通知上層模塊有新的數(shù)據(jù)到達(dá)或數(shù)據(jù)發(fā)送完成。
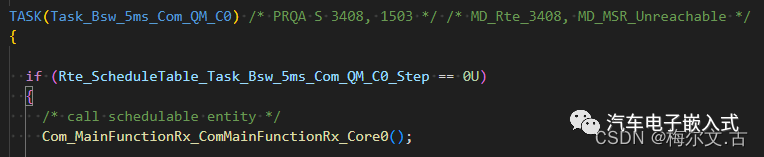
在代碼中可以是通過(guò)一個(gè)TASK來(lái)循環(huán)執(zhí)行 Com_MainFunctionRx 這個(gè)任務(wù),Com_MainFunctionRx是一個(gè)COM模塊的主任務(wù)函數(shù),用于處理接收到的數(shù)據(jù)。當(dāng)Com_MainFunctionRx函數(shù)接收到數(shù)據(jù)后,可以通過(guò)調(diào)用ComNotification來(lái)觸發(fā)通知事件,通知上層應(yīng)用程序進(jìn)行處理。
當(dāng)數(shù)據(jù)更新時(shí),COM層會(huì)檢查所有與該數(shù)據(jù)相關(guān)聯(lián)的ComNotification,并將其標(biāo)記為“待觸發(fā)”。然后,COM層會(huì)在稍后的時(shí)間點(diǎn)觸發(fā)已標(biāo)記為“待觸發(fā)”的ComNotification,并將相關(guān)的數(shù)據(jù)對(duì)象ID作為參數(shù)傳遞給應(yīng)用程序。


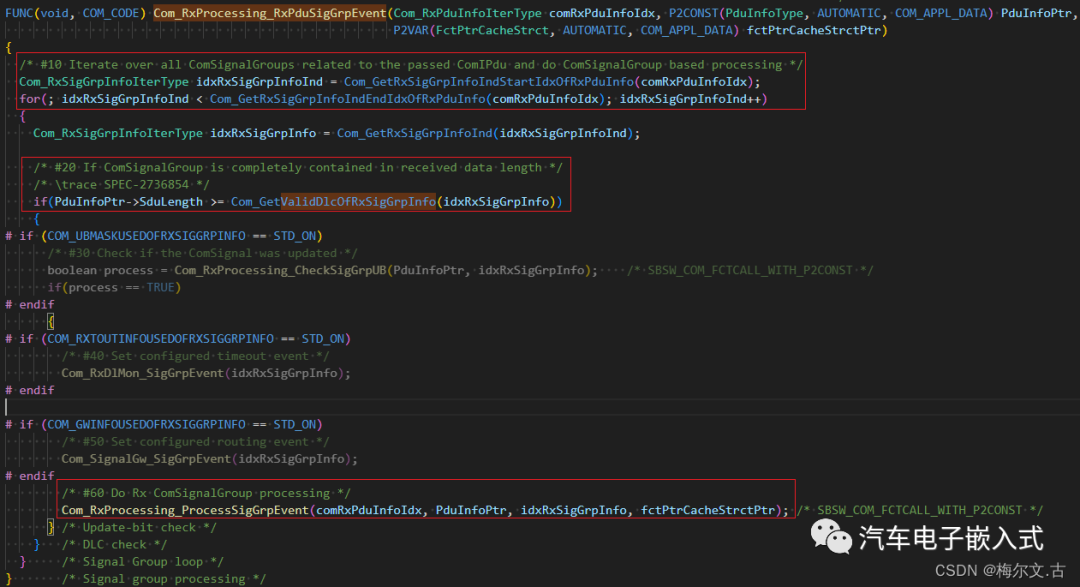
假設(shè)收到的是信號(hào)組,遍歷所有COM收到的信號(hào)組,如果信號(hào)組的數(shù)據(jù)完整,就觸發(fā)ComNotification的,進(jìn)入到下一個(gè)處理。

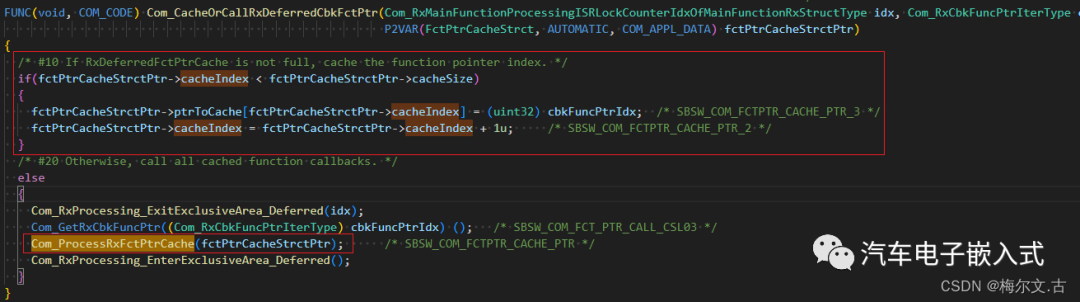
當(dāng)Com接收到一個(gè)PDU時(shí),它會(huì)根據(jù)配置選擇是將PDU緩存起來(lái)還是直接調(diào)用應(yīng)用程序提供的回調(diào)函數(shù)。如果選擇了緩存,那么PDU將被緩存起來(lái),并等待應(yīng)用程序調(diào)用Com_ReceiveSignal或Com_ReceiveSignalGroup函數(shù)時(shí)進(jìn)行處理;如果選擇了直接調(diào)用回調(diào)函數(shù),則會(huì)將PDU的數(shù)據(jù)傳遞給應(yīng)用程序提供的回調(diào)函數(shù)進(jìn)行處理。


Com_CacheOrCallRxDeferredCbkFctPtr,用于緩存或調(diào)用接收到PDU時(shí)的回調(diào)函數(shù)。
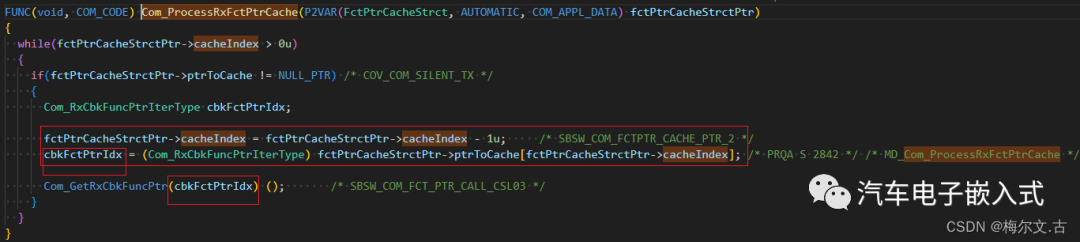
當(dāng)Com接收到一個(gè)PDU時(shí),它會(huì)根據(jù)配置選擇是將PDU緩存起來(lái)還是直接調(diào)用應(yīng)用程序提供的回調(diào)函數(shù)。如果選擇了緩存,那么回調(diào)函數(shù)的索引將被緩存起來(lái),并等待應(yīng)用程序調(diào)用Com_ReceiveSignal或Com_ReceiveSignalGroup函數(shù)時(shí)進(jìn)行處理;如果選擇了直接調(diào)用回調(diào)函數(shù),則會(huì)將PDU的數(shù)據(jù)傳遞給應(yīng)用程序提供的回調(diào)函數(shù)進(jìn)行處理。
對(duì)比兩種回調(diào):
ComRxPduCallout的觸發(fā)順序可以按照接收到PDU的順序進(jìn)行,因?yàn)樵?strong>處理每個(gè)PDU時(shí),COM模塊都會(huì)等待應(yīng)用程序返回處理狀態(tài),然后再繼續(xù)處理下一個(gè)PDU。因此,如果應(yīng)用程序處理PDU的順序與PDU到達(dá)的順序相同,則ComRxPduCallout的回調(diào)也會(huì)按照PDU到達(dá)的順序進(jìn)行。
ComNotification是一種機(jī)制,允許應(yīng)用程序在數(shù)據(jù)更新事件發(fā)生時(shí)執(zhí)行自定義邏輯,并不要求應(yīng)用程序返回狀態(tài)值。當(dāng)COM模塊檢測(cè)到數(shù)據(jù)更新事件時(shí),它會(huì)對(duì)與更新事件相關(guān)聯(lián)的數(shù)據(jù)對(duì)象注冊(cè)的ComNotification進(jìn)行回調(diào),并將相關(guān)的數(shù)據(jù)對(duì)象ID作為參數(shù)傳遞給應(yīng)用程序。ComNotification的觸發(fā)順序不能按照接收到PDU的順序進(jìn)行,因?yàn)樵跀?shù)據(jù)更新事件發(fā)生時(shí),COM模塊無(wú)法確定哪些數(shù)據(jù)對(duì)象會(huì)發(fā)生更新以及它們的更新順序。
舉例:
假設(shè)有兩個(gè)節(jié)點(diǎn)A和B,它們之間通過(guò)CAN總線(xiàn)進(jìn)行通信。節(jié)點(diǎn)A向節(jié)點(diǎn)B發(fā)送兩個(gè)數(shù)據(jù)對(duì)象1和2。首先,節(jié)點(diǎn)A發(fā)送數(shù)據(jù)對(duì)象1,然后發(fā)送數(shù)據(jù)對(duì)象2,節(jié)點(diǎn)B按照接收到PDU的順序先接收到了數(shù)據(jù)對(duì)象1,然后接收到了數(shù)據(jù)對(duì)象2。此時(shí),如果節(jié)點(diǎn)B上的應(yīng)用程序使用ComRxPduCallout來(lái)處理PDU,并且在處理PDU時(shí)需要訪(fǎng)問(wèn)其他節(jié)點(diǎn)發(fā)送的數(shù)據(jù)對(duì)象,那么ComRxPduCallout的回調(diào)順序?qū)凑展?jié)點(diǎn)發(fā)送的順序進(jìn)行。因此,節(jié)點(diǎn)B上的應(yīng)用程序?qū)凑?->2的順序處理PDU,并且可以在處理PDU時(shí)訪(fǎng)問(wèn)先收到的數(shù)據(jù)對(duì)象1。
相反,如果節(jié)點(diǎn)B上的應(yīng)用程序使用ComNotification來(lái)處理數(shù)據(jù)更新事件,并且在處理數(shù)據(jù)更新事件時(shí)需要訪(fǎng)問(wèn)其他節(jié)點(diǎn)發(fā)送的數(shù)據(jù)對(duì)象,那么ComNotification不一定按照節(jié)點(diǎn)發(fā)送順序執(zhí)行。例如,如果數(shù)據(jù)對(duì)象1和2之間存在依賴(lài)關(guān)系,并且在數(shù)據(jù)對(duì)象2更新前,數(shù)據(jù)對(duì)象1也會(huì)發(fā)生更新,那么節(jié)點(diǎn)2上的應(yīng)用程序可能會(huì)在接收到數(shù)據(jù)對(duì)象2更新事件前先接收到數(shù)據(jù)對(duì)象1的更新事件。因此,節(jié)點(diǎn)B上的應(yīng)用程序不能保證按照節(jié)點(diǎn)發(fā)送順序執(zhí)行,因?yàn)楦率录捻樞蚩赡芘c節(jié)點(diǎn)發(fā)送順序不同。
ComNotification的接收對(duì)象的依存關(guān)系是通過(guò)ComSignal的更新順序來(lái)判斷的。在標(biāo)準(zhǔn)的AUTOSAR架構(gòu)中,ComSignal是一個(gè)最小的數(shù)據(jù)單元,用于在不同的ECU之間傳輸數(shù)據(jù)。ComSignal可以表示為一個(gè)信號(hào),例如車(chē)速、轉(zhuǎn)速等。ComSignal可以在ECU之間交換,也可以在ECU內(nèi)部使用。每個(gè)ComSignal都可以擁有一個(gè)或多個(gè)ComSignalGroup,其中每個(gè)ComSignalGroup包含一組相關(guān)的ComSignal。這些ComSignal可以具有不同的數(shù)據(jù)類(lèi)型、精度、單位和值范圍。ComSignalGroup可以在ECU之間交換,也可以在ECU內(nèi)部使用。
當(dāng)一個(gè)ComSignal或ComSignalGroup的值發(fā)生變化時(shí),ComNotification會(huì)將更新事件通知給所有已注冊(cè)該ComSignal或ComSignalGroup的應(yīng)用程序。應(yīng)用程序可以在接收到更新事件時(shí)執(zhí)行自定義邏輯。
ComNotification的接收對(duì)象的依存關(guān)系是基于ComSignal的更新順序來(lái)判斷的。如果多個(gè)ComSignal的更新順序存在依賴(lài)關(guān)系,那么它們的接收對(duì)象之間也會(huì)存在依賴(lài)關(guān)系。例如,如果一個(gè)ComSignal的更新依賴(lài)于另一個(gè)ComSignal的更新,那么它們的接收對(duì)象之間也會(huì)存在依賴(lài)關(guān)系。在這種情況下,應(yīng)用程序需要確保在接收到依賴(lài)的ComSignal的更新事件后再處理當(dāng)前ComSignal的更新事件,以避免使用不一致的數(shù)據(jù)。
總之,ComNotification的接收對(duì)象的依存關(guān)系是基于ComSignal的更新順序來(lái)判斷的。如果多個(gè)ComSignal的更新順序存在依賴(lài)關(guān)系,那么它們的接收對(duì)象之間也會(huì)存在依賴(lài)關(guān)系。應(yīng)用程序需要確保在接收到依賴(lài)的ComSignal的更新事件后再處理當(dāng)前ComSignal的更新事件,以避免使用不一致的數(shù)據(jù)。
審核編輯:劉清
-
接收機(jī)
+關(guān)注
關(guān)注
8文章
1184瀏覽量
53638 -
AUTOSAR
+關(guān)注
關(guān)注
10文章
363瀏覽量
21783 -
CAN控制器
+關(guān)注
關(guān)注
3文章
74瀏覽量
15103 -
回調(diào)函數(shù)
+關(guān)注
關(guān)注
0文章
87瀏覽量
11623
原文標(biāo)題:AUTOSAR中CAN信號(hào)是如何觸發(fā)COM回調(diào)的
文章出處:【微信號(hào):汽車(chē)電子嵌入式,微信公眾號(hào):汽車(chē)電子嵌入式】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
STemWin中用到很多回調(diào)函數(shù),這些回調(diào)函數(shù)是什么時(shí)候被觸發(fā)的?
請(qǐng)問(wèn)LWIP中的回調(diào)函數(shù)如何傳遞參數(shù)?
怎么通過(guò)rt_device_t判斷是哪個(gè)串口觸發(fā)的回調(diào)函數(shù)
在哪里可以找到CAN驅(qū)動(dòng)程序中的演示Autosar代碼呢
CAN總線(xiàn)使用擴(kuò)展ID觸發(fā)FIFO回調(diào)怎么解決呢
CAN發(fā)送和串口發(fā)送是不是不能放在定時(shí)器的回調(diào)函數(shù)中?
怎么通過(guò)rt_device_t判斷是那個(gè)串口觸發(fā)的回調(diào)函數(shù)?
如何檢測(cè)由未知CAN ID觸發(fā)的中斷信號(hào)?
C語(yǔ)言函數(shù)的回調(diào)函數(shù)
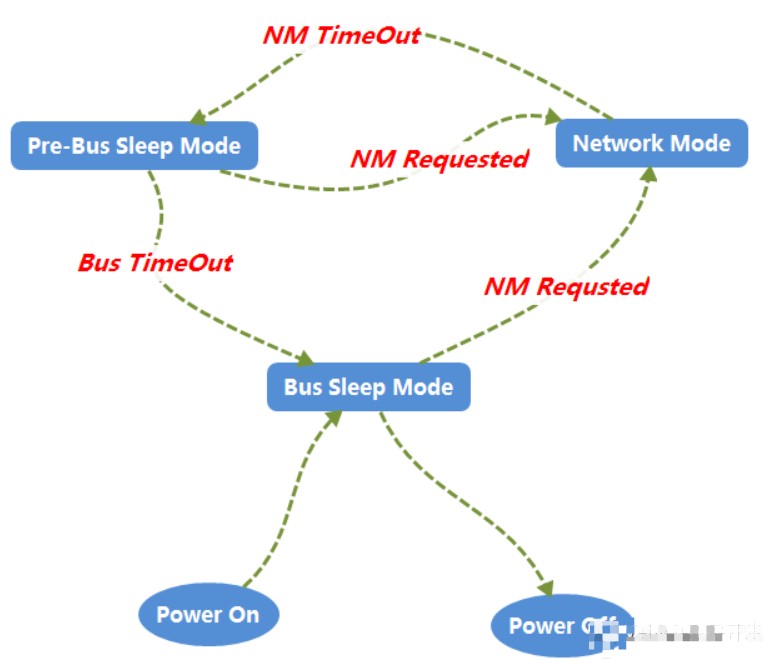
AUTOSAR CAN網(wǎng)絡(luò)管理協(xié)議
根據(jù)回調(diào)機(jī)制注冊(cè)事件并處理回調(diào)VI
AutoSAR中CAN通信網(wǎng)絡(luò)管理的概述
labview中事件回調(diào)的使用
應(yīng)用筆記 | 淺談STM32庫(kù)里的回調(diào)函數(shù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論