 駕駛策略什么意思自動駕駛
駕駛策略什么意思自動駕駛
行為規劃(駕駛策略)
行為規劃(BP)功能模塊提供算法以在路線目標內做出機動決策。
使用多模型路徑規劃算法進行機動,給定目標跟蹤和空間及走廊內所有動態對象的預測行為,行為規劃器同時評估多種可能的機動,然后將其與更新的道路觀測相關聯。行為規劃需要在車輛安全性和舒適性的基礎上平衡駕駛效率。駕駛效率意味著確定最佳車道或道路以快速到達目的地,而舒適性考慮則意味著安全地到達那個車道或走廊。車道排名和可行性檢查是車輛行為規劃的兩個核心要素。
關于車道排名,算法遵循三個主要原則:
- 車道變化越少越好。
- 距離前方移動物體越遠評分越高。
- 前方物體的速度越快,車輛在車道上的行駛速度就越快。在每個可能的車道排名之后,定義它們的可行性并分配成本。
下圖顯示了算法如何定義可行性的示例,以及如何選擇成本更低的機動列表。
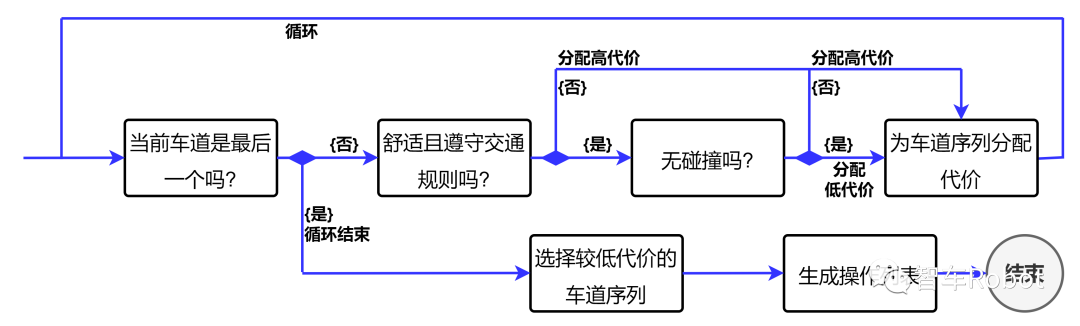
車道排序決策樹
機動列表包含要由車輛執行的高級語義決策及物理參數,機動的示例可以是(不詳盡):
?巡航:在當前車道內,以設定速度。
?跟隨:保持在當前車道,以提供的速度限制行駛,以最小距離跟隨前車,以提供的速度和ID。
?轉向:從當前車道轉到目標車道,左轉或右轉,以提供的轉向速度 。
?改道:從當前車道移動到目標車道,以提供的加速度超車目標車輛[或以提供的減速度讓目標車輛通過]。?停止:在提供的距離內減速到零速度并保持在當前車道。
行為規劃輸入:
?靜態對象預測:用于評估機動的安全性和舒適性。
?動態對象預測:用于評估機動的安全性和舒適性。
?路線目標:提供基本指導原則,例如車道或行駛走廊,用于機動決策。
?基于場景的機動約束:用于排除被當前駕駛場景條件禁止的機動。
?基于操作域監控的機動約束:確保自主車輛的結果機動不違反當前操作設計域邊界條件。
?自車運動:用于機動評估。
行為規劃輸出:
?感興趣區域(ROI):提供一個或多個應優先處理的感知區域的描述。
?機動:提供要由自主車輛執行的高級語義決策及物理參數。
?行為規劃任務請求:由行為規劃器請求修改任務。如果行為規劃器確定無法按計劃進行任務,則可能需要這樣做。請求的性質可以是請求人類司機接管,例如。
?自主車輛機動假設:準備一個或多個假設的機動,系統可以為此預測一個或多個結果。
-
汽車電子
+關注
關注
3029文章
8023瀏覽量
167804 -
算法
+關注
關注
23文章
4630瀏覽量
93351 -
車輛
+關注
關注
0文章
83瀏覽量
15214 -
自動駕駛
+關注
關注
785文章
13930瀏覽量
167002
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論