") 使用ROS與Movelt實現(xiàn)myCobot 280運動軌跡規(guī)劃和控制
使用ROS與Movelt實現(xiàn)myCobot 280運動軌跡規(guī)劃和控制
ROS的技術(shù)案例
Introduction
今天這篇文章將記錄我使用myCobot 280 M5stack 在ROS當(dāng)中是如何使用的。為什么使用ROS呢,因為提及到機器人都離不開ROS這個操作系統(tǒng),今天是我們第一次使用ROS這個系統(tǒng)。
今天我將從ROS的介紹,環(huán)境的配置以及mycobot280 在ROS當(dāng)中的使用。
ROS
ROS(Robot Operating System,機器人操作系統(tǒng))是一個用于編寫機器人軟件的靈活的框架。它是一個半開源的項目,為研究人員和開發(fā)者提供了一套工具和庫,以幫助他們創(chuàng)建各種機器人應(yīng)用。ROS主要用于研究和開發(fā)各種機器人系統(tǒng),如自動駕駛車輛、服務(wù)機器人、工業(yè)機器人、無人機等。它使得機器人的開發(fā)更加高效,也使得機器人的功能更加強大和靈活。ROS操作系統(tǒng)目前最受關(guān)注的兩個模塊是導(dǎo)航(navigation)和機械臂控制(moveit)其中moveit可以讓用戶快速建立機械臂模型并實現(xiàn)機械臂的控制,例如建模,運動學(xué)求解,運動規(guī)劃,避障等功能。介于有這么一個強大的系統(tǒng),我想用它來仿真實現(xiàn)一些機械臂的避障,路徑規(guī)劃等功能。
環(huán)境配置
ROS主要支持Ubuntu(Linux),Mac OS(缺少部分的支持)這些操作系統(tǒng),最常見的還是在ubuntu系統(tǒng)上使用。我電腦安裝的是ubuntu18.04版本,Ubuntu18對應(yīng)的ROS版本是melodic,不同版本的ubuntu對應(yīng)不同ROS版本。
ubuntu16.04-kinetic
ubuntu18.04-melodic
ubuntu20.04-noetic
由于我電腦已經(jīng)安裝好了系統(tǒng)以及ROS環(huán)境,這邊就不一一記錄了,主要還是記錄ROS當(dāng)中的操作。 關(guān)于ubuntu系統(tǒng)的安裝和ROS環(huán)境的搭建大家可以在Google當(dāng)中搜索,ROS官網(wǎng)也有詳細的安裝教程。
ROS: Getting Started
我今天使用的場景是moveit控制機械臂,所以對于電腦硬件的需求不高,這邊注意如果是使用SLAM雷達導(dǎo)航等功能,可能就需要高配一些的電腦來處理運算能力。
檢測自己是否安裝完成ROS的標(biāo)準(zhǔn),打開終端輸入“roscore”,出現(xiàn)跟下圖一樣的內(nèi)容代表安裝成功了。
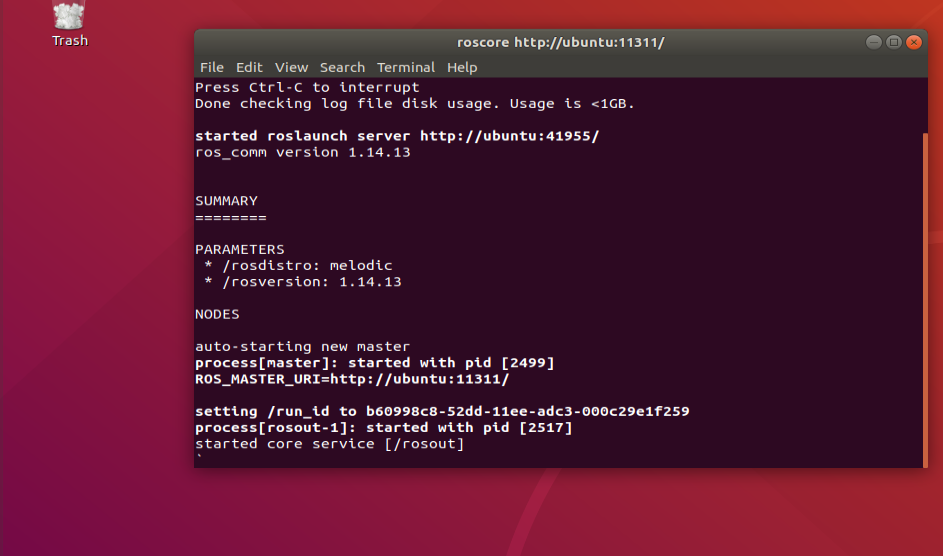
讓我們開始使用ROS吧。
ROS的使用
在ROS當(dāng)中創(chuàng)建一個機械臂,并且使用一些路徑規(guī)劃的功能需要執(zhí)行以下步驟。
創(chuàng)建URDF的文件,也就是機械臂的模型
將URDF文件加載到ROS服務(wù)器當(dāng)中
使用RViz進行可視化
創(chuàng)建MoveIt配置包
使用MoveIt進行運動規(guī)劃
創(chuàng)建URDF文件
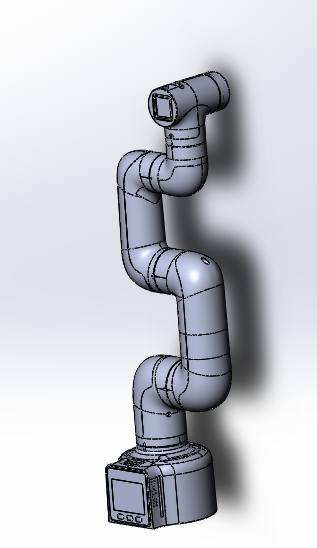
首先咱得創(chuàng)建機械臂的URDF(Unified Robot Description Format)文件,這個文件至關(guān)重要,因為機械臂的3D模型,這個文件描述了機械臂的屬性,如關(guān)節(jié),鏈接和傳感器。由于該產(chǎn)品是大象機器人的一款機械臂myCobot 280 M5Stack,大象機器人在Github有提供myCobot 280的URDF文件描述了機械臂的一些物理屬性。
https://github.com/elephantrobotics/mycobot_ros/tree/noetic/mycobot_description/urdf
如何生成urdf文件:
需要使用CAD軟件制作模型,確保制作的3D模型跟實際的機械臂尺寸一致。因為導(dǎo)出的模型要是一個可以被ROS接受的格式,通常是DAE(collada)文件。
將URDF加載到ROS服務(wù)器
創(chuàng)建ROS包
創(chuàng)建一個存放URDF文件的包,在終端執(zhí)行下面的代碼
catkin_create_pkg mycobot_description rospy std_msgs sensor_msgs
其中‘rospy’,‘std_msgs'和’sensor_msgs'是ROS的依賴包
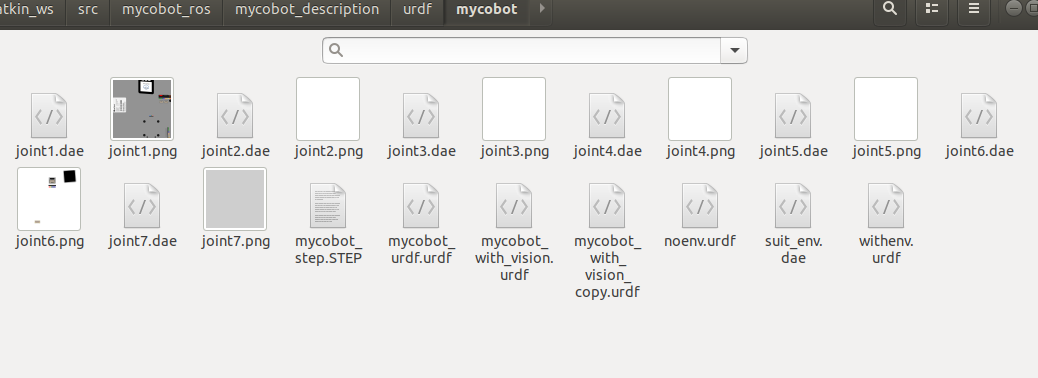
將生成的urdf文件添加到mycobot_description/urdf的目錄下
創(chuàng)建啟動文件
在mycobot_description/launch目錄下創(chuàng)建一個load_urdf.launch文件,在其中添加以下內(nèi)容
啟動ROS文件qi
我們在打開終端輸入下面的命令。
roslaunch my_robot_description load_urdf.launch
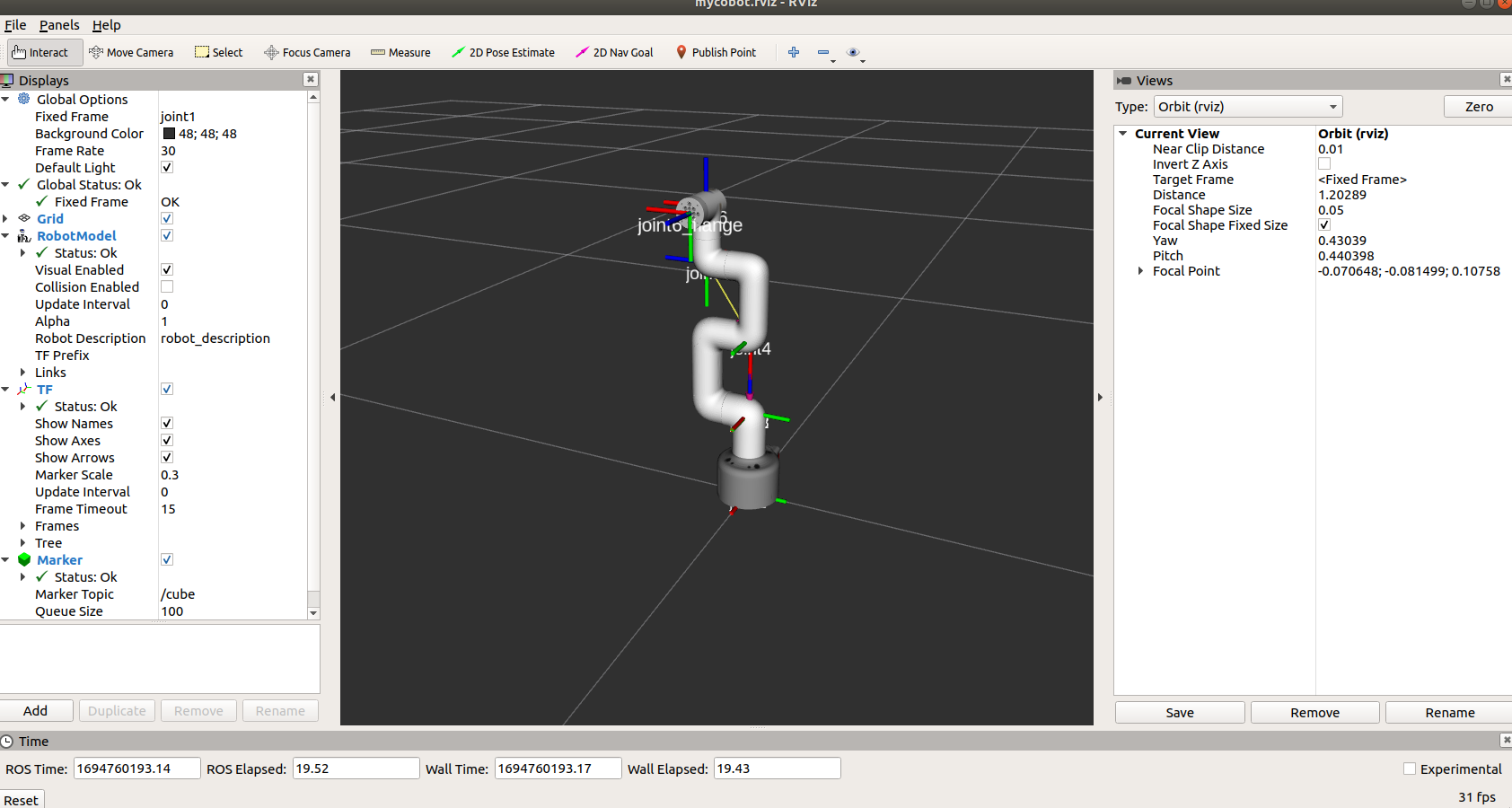
運行完之后,就可以在RViz當(dāng)中看到我們創(chuàng)建的模型了。
配置MoveIt
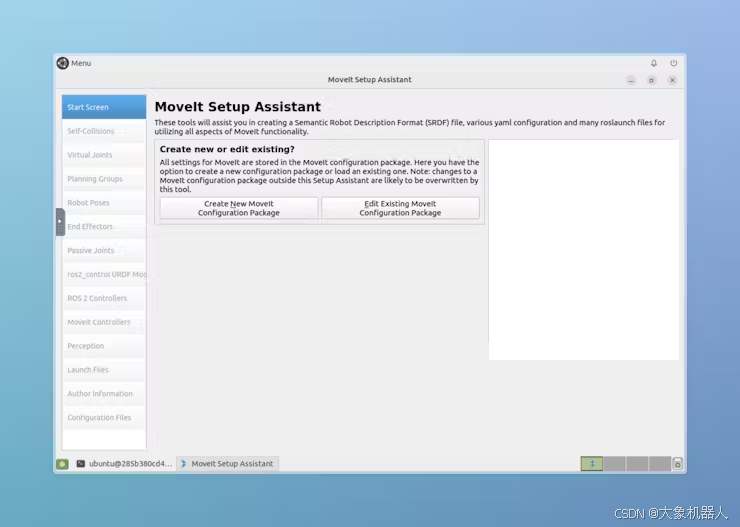
啟動MoveIt Setup Assistant:
在終端中,運行以下命令來啟動MoveIt Setup Assistant:
roslaunch moveit_setup_assistant setup_assistant.launch
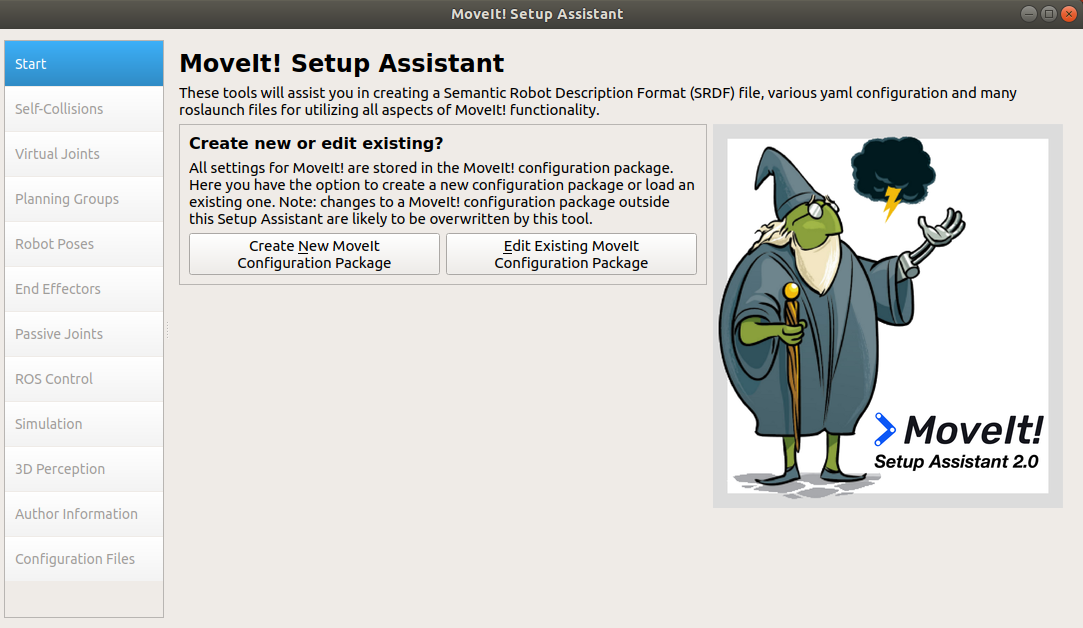
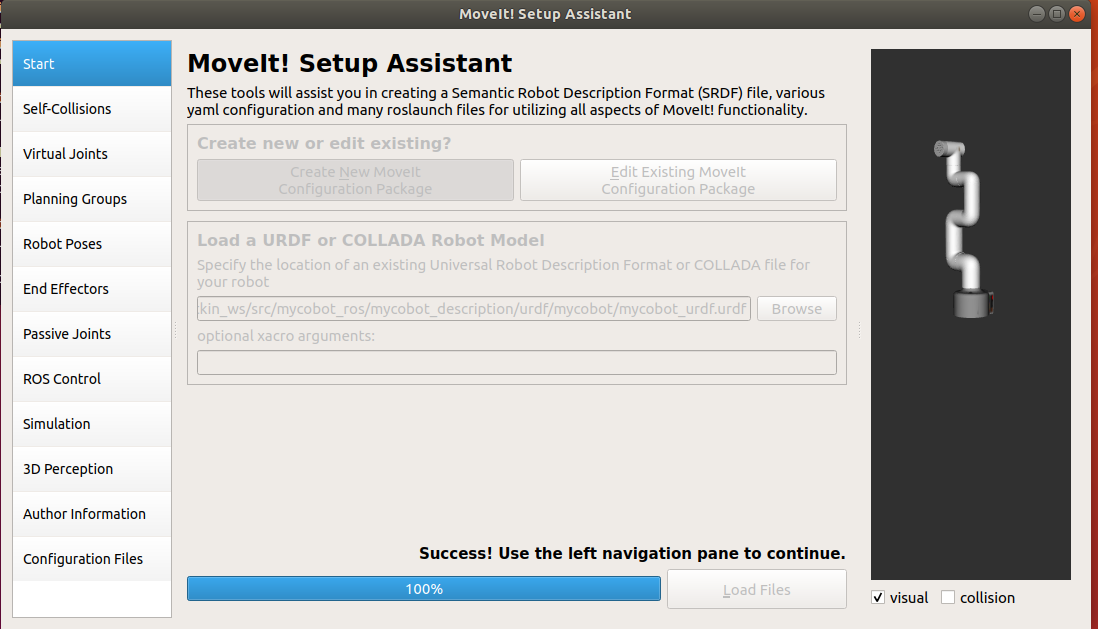
在MoveIT當(dāng)中加載URDF
在MoveIt Setup Assistant的主界面,點擊“Create New MoveIt Configuration Package”按鈕。然后,在彈出的對話框中,選擇我的URDF文件(在ROS參數(shù)robot_description中)。點擊“Load Files”按鈕來加載你的URDF文件。顯示下圖就加載成功了。
配置我的機器人
根據(jù)自己的需求來配置自己的機器人。這里簡要介紹幾個配置:
Self-Collisions:MoveIt會自動計算你的機器人的自碰撞矩陣。可以點擊“Regenerate Default Collision Matrix”按鈕來生成默認的自碰撞矩陣。
Virtual Joints:可以為你的機器人定義虛擬關(guān)節(jié)。虛擬關(guān)節(jié)通常用于連接你的機器人和世界。
Planning Groups:可以定義你的機器人的規(guī)劃組。規(guī)劃組是一組需要一起移動的關(guān)節(jié)和鏈。例如,你可以創(chuàng)建一個包含所有手臂關(guān)節(jié)的規(guī)劃組。
Robot Poses:可以定義你的機器人的預(yù)設(shè)姿態(tài)。預(yù)設(shè)姿態(tài)可以在規(guī)劃中被重復(fù)使用。
運行moveit
配置完成之后會生成.launch的文件,我們運行它就可以在moveit中使用機械臂了。
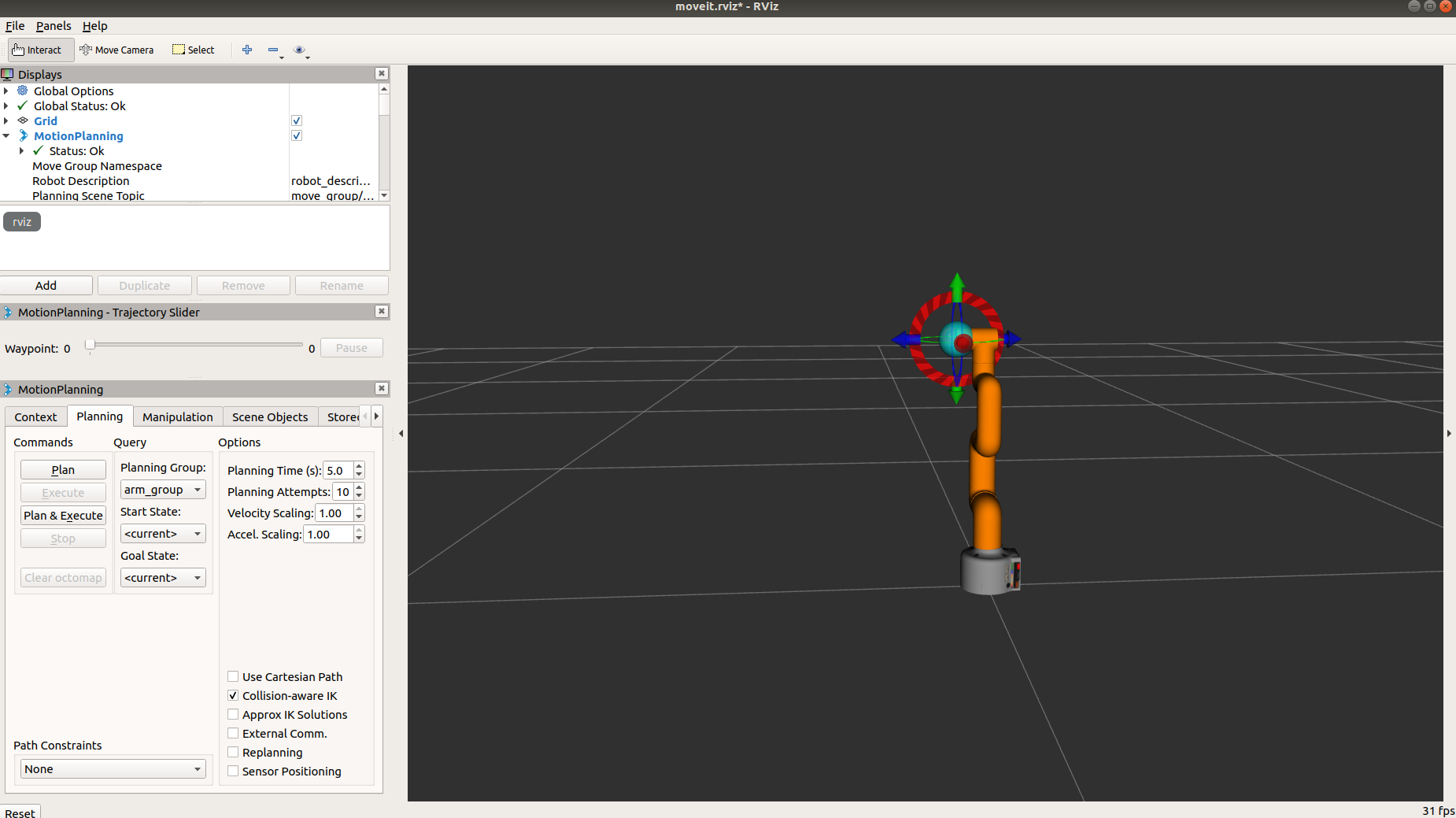
我們來看看moveit的功能如何進行路徑規(guī)劃,拖動機械臂末端的坐標(biāo),可以對機械臂進行運動的變化,也可以隨機生成路徑。
物體避障
我們在moveit中添加一個障礙物讓機械臂進行避障,添加一個方塊,讓機械臂在做軌跡的時候繞過它。
除此之外moveit還有許多功能例如,運動規(guī)劃,可以為多關(guān)節(jié)的機器人進行路徑規(guī)劃,避免碰撞,并且還可以是用多種運動規(guī)劃算法RRT,EST,LBKPIECE等;碰撞檢測,可以進行復(fù)雜的3D碰撞檢測,包括子碰撞和環(huán)境碰撞(障礙物);仿真,可以于gazebo機器人仿真器繼承,進行真實的物理仿真等等功能。
總結(jié)
MoveIt提供了一套完整的工具集,可以用于機械臂的運動規(guī)劃和控制的研究,無需從頭開始構(gòu)建復(fù)雜的運動規(guī)劃系統(tǒng)。這可以使得開發(fā)人員將更多的經(jīng)理集中在實現(xiàn)具體的應(yīng)用功能上,而不是解決底層的運動規(guī)劃和控制問題上。總的來說,ROS和MoveIt為機器人技術(shù)的發(fā)展提供了強大的支持。它們不僅降低了開發(fā)難度,提高了開發(fā)效率,而且還推動了機器人技術(shù)的創(chuàng)新和應(yīng)用。無論你是機器人技術(shù)的研究者,還是實際應(yīng)用的開發(fā)者,ROS和MoveIt都將是你不可或缺的工具。
我在未來也會繼續(xù)探索更多的機械臂項目,并不定期分享我的發(fā)現(xiàn)和成果。如果你發(fā)現(xiàn)本文中有一些錯誤歡迎跟我進行溝通,如果你喜歡這篇文章留下你的點贊和評論是對我最大的支持!
審核編輯 黃宇
-
機器人
+關(guān)注
關(guān)注
211文章
28646瀏覽量
208434 -
機械臂
+關(guān)注
關(guān)注
12文章
520瀏覽量
24726 -
ROS
+關(guān)注
關(guān)注
1文章
280瀏覽量
17102
發(fā)布評論請先 登錄
相關(guān)推薦
如何使用PLC控制myCobot 320機械臂

使用myCobot 280機械臂結(jié)合ROS2系統(tǒng)搭建機械分揀站

在Mac上使用Docker構(gòu)建noVNC環(huán)境并運行MyCobot
運動控制中如何實現(xiàn)路徑軌跡預(yù)測
EtherCAT運動控制器PT/PVT實現(xiàn)用戶自定義軌跡規(guī)劃

運動控制器的主要功能是什么?
運動控制和過程控制的區(qū)別和聯(lián)系
運動控制系統(tǒng)的組成與作用
基于VPLC711的曲面外觀檢測XYR運動控制解決方案
利用6軸姿態(tài)模塊來計算,物體的運動軌跡能不能實現(xiàn)?
EtherCAT運動控制器在ROS上的應(yīng)用開發(fā)案例(下)

EtherCAT運動控制器在ROS上的應(yīng)用開發(fā)案例(上)

EtherCAT運動控制器在ROS上的應(yīng)用(下)

EtherCAT運動控制器在ROS上的應(yīng)用(上)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論