 MM32F0140 UART學習筆記
MM32F0140 UART學習筆記
UART簡介
UART是通用異步收發器,全稱為Universal Asynchronous Receiver and Transmitter,屬于異步串口通信協議的一種,能夠靈活進行全雙工數據交換。
MM32F0140的UART支持全雙工數據交換、同步單向通信、半雙工單線通信、多處理器之間的通信以及調制解調器(CTS/RTS)操作。
串行通信
串行通信是指使用一條數據線,將數據一位一位地依次傳輸,每一位數據占據一個固定的時間長度,只需要少數幾條線就可以在系統間交換信息。
串行通信按照數據傳輸方向分為:
● 單工通信
數據只能在一個方向上傳輸,通常采用兩線進行通信,分別是:GND、TX(發送數據輸出引腳)或RX(接收數據輸入引腳),發送設備與接收設備共地將參考電壓調節一致,MCU做發送或接收。
● 半雙工通信
相當于可切換方向的單工通信,在具體時刻,只允許數據在一個方向上傳輸,不能同時在兩個方向上傳輸。
● 全雙工通信
允許數據同時在兩個方向上傳輸,通常采用三線,分別是:GND、TX、RX,接收設備與發送設備均為雙向通信設備,若通信雙方有一方需為另一方提供電源,則兩設備的VDD相連。
異步通信
異步通信過程中,接收器和發送器使用各自的時鐘,以一個字符為傳輸單位,通信中兩個字符間的時間間隔不固定,但在同一個字符中的兩個相鄰位間的時間間隔固定,每一個字符要用起始位和停止位作為字符開始和結束的標志。
UART功能
如圖1所示,Device1做發送器,Device2做接收器進行通信,發送器對發送數據執行“并->串”轉換,然后,數據從發送器的發送數據輸出引腳(TX)輸出,在傳輸線路上一位一位的傳輸到接收器的接收數據輸入引腳(RX),接收器對接收到的數據進行“串->并”轉換。
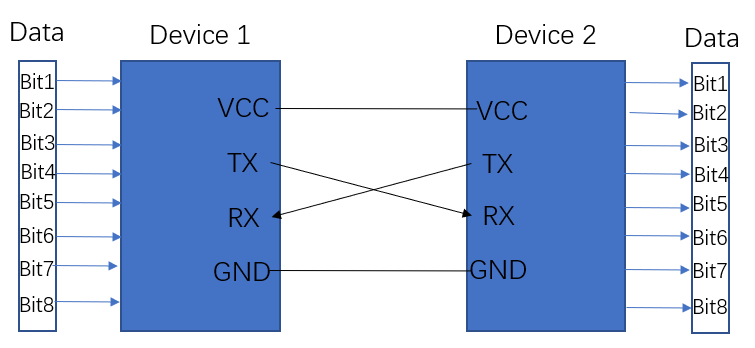 圖1. UART通信
圖1. UART通信
數據傳輸
UART的數據傳輸如圖2所示,包含起始位、數據幀、奇偶校驗位、停止位、空閑幀與斷開幀。
● 起始位
在發送器被使能,且無數據發送時,TX引腳處于高電平,若要進行數據傳輸,發送器會在發送起始位拉低TX引腳,即將傳輸線從高電平拉到低電平并保持1個時鐘周期。
● 數據幀
數據幀包含需要傳輸的數據,數據長度由UART通用控制寄存器(UART_CCR)的CHAR位配置,通常可以設置為5 ~ 8位,若不使用奇偶校驗位,數據幀長度可為9位。
發送數據需要將UART全局控制寄存器(UART_GCR)的TXEN位置1,數據從UART發送數據寄存器(UART_TDR)寫入,經過一字節緩沖器緩沖,最后通過發送移位寄存器,以最低字節到最高字節的順序,串行在TX引腳上輸出。
接收數據需要將UART全局控制寄存器(UART_GCR)的RXEN位置1,讀UART接收數據寄存器(UART_RDR)可獲取接收到的數據并清零中斷狀態寄存器(UART_ISR)的RX_INTF(接收有效數據中斷標志)。
● 奇偶校驗位
檢驗數據中1的總個數為奇或偶,判斷傳輸器件數據是否發生改變。奇偶校驗可以通過UART通用控制寄存器(UART_CCR)的PEN位置1使能發送接收校驗,UART_CCR寄存器的PSEL位為1則數據偶校驗,PSEL位為0則數據奇校驗。
奇校驗:若數據位中1的數目是偶數,則校驗位為1,如果1的數目是奇數,校驗位為0。
偶校驗:若數據位中1的數目是偶數,則校驗位為0,如果1的數目是奇數,校驗位為1。
● 停止位
停止位用1表示一幀的結束,可通過配置UART通用控制寄存器(UART_CCR)的SPB0位設置停止位位數,位數可設置為0.5、1、1.5、2個停止位。
● 空閑幀
包括停止位在內,一個完全由1組成的完整數據幀,定義為一個空閑符號,下一個數據幀的起始位跟在空閑符之后。
● 斷開幀
包括停止位在內,一個完全由0組成的完整數據幀,定義為一個斷開符號,在斷開幀結束時,發送器再發送一個停止位1,使得下一幀的起始位能夠被識別到(產生下降沿被檢測到)。斷開符號通過設置UART_CCR寄存器的BRK位進行發送,若BKP位置1,在當前數據發送完成后,將會發送一個斷開符號到TX引腳上。
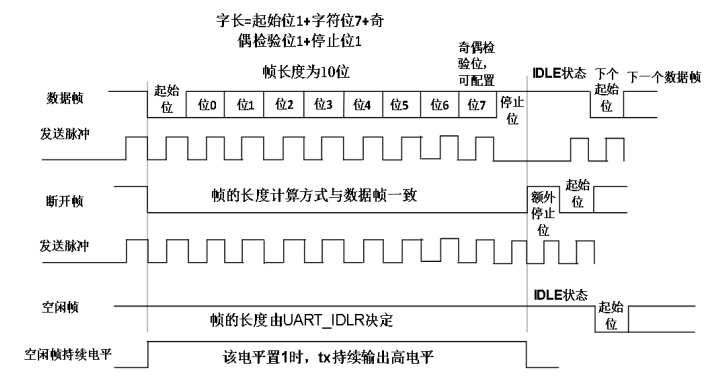 圖2. UART數據傳輸
圖2. UART數據傳輸
波特率
波特率表示數據傳輸速率,波特率發生器產生時鐘,經過發送器和接收器的使能位置位控制后,供給發送或接收使用。對于大多數串行通信,需要將發送和接收設備的波特率設置為相同的值,若波特率不同,則發送與接收數據的時序可能受到影響。波特率的計算公式如圖3所示,UART波特率寄存器(UART_BRR)存放UART分配器除法因子(UARTDIV)的整數部分,UART分數波特率寄存器(UART_FRA)存放UARTDIV的小數部分。例如,若系統時鐘為48M,配置波特率為9600(每秒傳輸9600bit的數據),則(48000000 /9600) / 16的結果賦值到UART_BRR寄存器中,(48000000 / 9600) % 16的取余結果賦值到UART_FRA寄存器中。
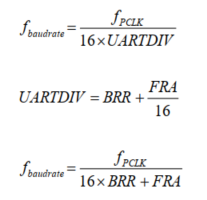 圖3. UART的波特率公式
圖3. UART的波特率公式
實驗
本實驗配置UART的基本發送與接收功能,配置時鐘速率為48MHz,波特率為9600,數據長度為8位,不使用校驗及自動流控制,設置PA9為TX引腳,PA10為RX引腳。通過串口調試工具觀察數據的傳輸,發送數據與接收數據相同。
配置系統時鐘 clock_init()
如圖4所示,高速外部時鐘(HSE)的頻率范圍為4 ~ 24MHz,實驗所使用的晶振為12M,要使系統時鐘為48MHz,則配置PLL輸出48MHz做系統時鐘,操作時鐘控制寄存器(RCC_CR)的HSEON位使能HSE,等待HSERDY位拉高(即HSE時鐘被釋放),設置PLL配置寄存器(RCC_PLLCFGR)中的PLLSRC位為1,并根據公式配置對應參數,PLL配置公式如圖5所示。配置閃存訪問控制寄存器(FLASH_ACR)啟用閃存預取,配置時鐘配置寄存器(RCC_CFGR)設置分頻并配置PLL輸出做系統時鐘。
void clock_init()
{
/* Enable HSE. */
RCC->CR |= RCC_CR_HSEON_MASK;
while ( RCC_CR_HSERDY_MASK != (RCC->CR RCC_CR_HSERDY_MASK ) ) /* Waiting HSE ready. */
{
}
/* F_clko = F_refin * N/(M * P), F_refin = 12M, 12*8/(1*2) = 48. */
RCC->PLLCFGR = RCC_PLLCFGR_PLLSRC(1) /* HSE clock is used as PLL input clock. */
| RCC_PLLCFGR_PLLDN(7) /* N = DN + 1 = 7 + 1 = 8. */
| RCC_PLLCFGR_PLLDM(1) /* M = DM + 1 = 1 + 1 = 2. */
| RCC_PLLCFGR_PLLDP(0) /* P = DP + 1 = 0 + 1 = 1. */
| RCC_PLLCFGR_PLLLDS(1) /* PLL lock detector accuracy select. */
| RCC_PLLCFGR_PLLICTRL(3) /* 10uA. */
;
/* Enable PLL. */
RCC->CR |= RCC_CR_PLLON_MASK;
while( 0u == ( RCC->CR RCC_CR_PLLRDY_MASK ) ) /* Waiting PLL ready. */
{
}
/* Enable the FLASH prefetch. */
RCC->AHB1ENR |= RCC_AHB1ENR_FLITFEN_MASK; /* Enable the access to FLASH. */
FLASH->ACR = FLASH_ACR_LATENCY(1u) /* Setup divider: 1 for 48Mhz. */
| FLASH_ACR_PRFTBE_MASK /* Enable flash prefetch. */
;
/* Setup the dividers for each bus. */
RCC->CFGR = RCC_CFGR_HPRE(0) /* Div=1 for AHB freq. */
| RCC_CFGR_PPRE1(0x0) /* Div=1 for APB1 freq. */
| RCC_CFGR_PPRE2(0x0) /* Div=1 for APB2 freq. */
| RCC_CFGR_MCO(7) /* Use PLL/2 as output. */
;
/* Switch the system clock source to PLL. */
RCC->CFGR = ( (RCC->CFGR ~RCC_CFGR_SW_MASK ) | RCC_CFGR_SW(2) ); /* Use PLL as SYSCLK. */
/* Wait till PLL is used as system clock source. */
while ( (RCC->CFGR RCC_CFGR_SWS_MASK ) != RCC_CFGR_SWS(2) )
{
}
}
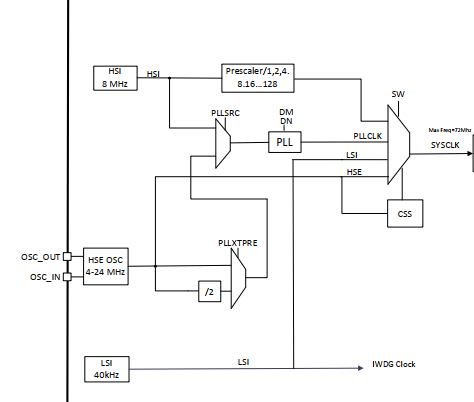 圖4. MM32F0140部分時鐘樹
圖4. MM32F0140部分時鐘樹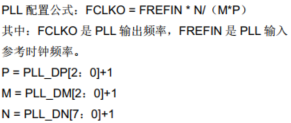 圖5. PLL配置公式
圖5. PLL配置公式
啟用UART外設時鐘 enable_clock()
UART1的UART1_TX與UART1_RX復用引腳為PA9與PA10,因此初始化GPIOA與UART1的外設時鐘,UART1在APB2上,GPIOA在AHB上。
void enable_clock()
{
/* Enable UART1 clock. */
RCC->APB2ENR |= RCC_APB2_PERIPH_UART1;
/* Enable GPIOA clock. */
RCC->AHB1ENR |= RCC_AHB1_PERIPH_GPIOA;
}
配置引腳 pin_init()
由于UART的TX與RX引腳配置為復用功能配置,如圖6所示,PA9, PA10的UART1_TX與UART1_RX均使用AF1,對端口復用功能高位寄存器(GPIO_AFRH)的端口9、端口10對應位賦值。
void pin_init()
{
/* Setup PA9, PA10. */
GPIOA->CRH = ~GPIO_CRH_MODE9_MASK;
GPIOA->CRH |= GPIO_PinMode_AF_PushPull; /* PA9 multiplexed push-pull output. */
GPIOA->AFRH = ~GPIO_AFRH_AFR_MASK;
GPIOA->AFRH |= (GPIO_AF_1 << GPIO_CRH_MODE9_SHIFT); /* Use AF1. */
GPIOA->CRH = ~GPIO_CRH_MODE10_MASK;
GPIOA->CRH |= GPIO_PinMode_In_Floating; /* PA10 floating input. */
GPIOA->AFRH |= (GPIO_AF_1 << GPIO_CRH_MODE10_SHIFT); /* Use AF1. */
}
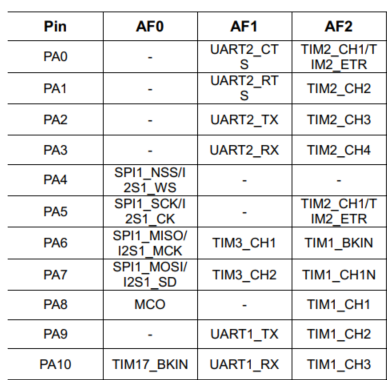 圖6. 部分引腳復用表格
圖6. 部分引腳復用表格
UART初始化 uart_init()
初始化UART需要配置:時鐘頻率、波特率、數據長度、停止位、傳輸模式及是否使用校驗。
如圖7所示,UART全局控制寄存器(UART_GCR)的TXEN位與RXEN位控制傳輸模式,兩位均置1表示傳輸模式為TX與RX,AUTOFLOWEN位控制是否使用自動流控制,UARTEN位控制UART的使能。
如圖8所示,UART通用控制寄存器(UART_CCR)的SPB1、SPB0位控制停止位位數,CHAR位控制數據寬度,PSEL位選擇采用奇校驗還是偶校驗,PEN位控制校驗使能;UART波特率寄存器(UART_BRR)與UART分數波特率寄存器(UART_FRA)分別存儲UART分頻器除法因子的整數與小數。
void uart_init()
{
/* Clear the corresponding bit to be used. */
UART1->CCR = ~( UART_CCR_PEN_MASK | UART_CCR_PSEL_MASK | UART_CCR_SPB0_MASK | UART_CCR_SPB1_MASK | UART_CCR_CHAR_MASK );
UART1->GCR = ~( UART_GCR_AUTOFLOWEN_MASK | UART_GCR_RXEN_MASK | UART_GCR_TXEN_MASK );
/* WordLength. */
UART1->CCR |= UART_CCR_CHAR_MASK;
/* XferMode. */
UART1->GCR |= (UART_XferMode_RxTx << UART_GCR_RXEN_SHIFT);
/* Setup baudrate, BOARD_DEBUG_UART_FREQ = 48000000u, BOARD_DEBUG_UART_BAUDRATE = 9600u. */
UART1->BRR = (BOARD_DEBUG_UART_FREQ / BOARD_DEBUG_UART_BAUDRATE) / 16u;
UART1->FRA = (BOARD_DEBUG_UART_FREQ / BOARD_DEBUG_UART_BAUDRATE) % 16u;
/* Enable UART1. */
UART1->GCR |= UART_GCR_UARTEN_MASK;
}
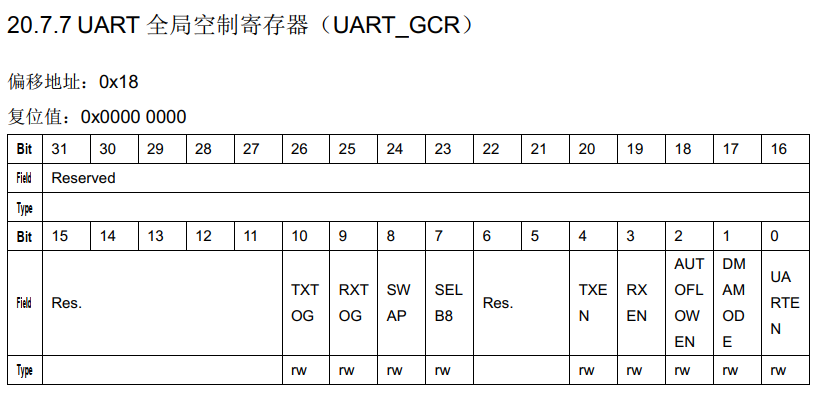 圖7. MM32F0140 UART_GCR寄存器
圖7. MM32F0140 UART_GCR寄存器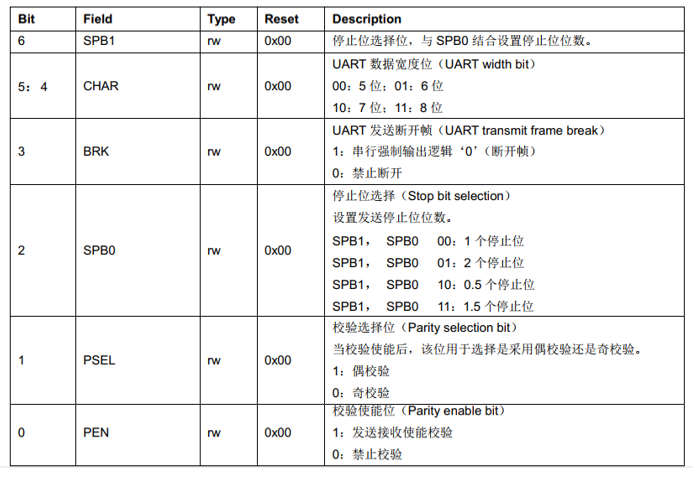 圖8. MM32F0140 UART_CCR寄存器部分位
圖8. MM32F0140 UART_CCR寄存器部分位
UART發送數據 uart_putchar()
通過讀取UART當前狀態寄存器(UART_CSR)獲取當前狀態,當發送緩沖區為空時,可進行數據發送,將發送數據傳入UART發送數據寄存器(UART_TDR),定義發送數據函數uart_putchar(),變量“c”為需要發送的數據。
void uart_putchar(uint8_t c)
{
while ( 0u == ( UART_STATUS_TX_EMPTY (UART1->CSR) ) ) /* Waiting tx buffer empty. */
{}
UART1->TDR = (uint8_t)c;
}
UART接收數據 uart_getchar()
通過讀取UART當前狀態寄存器(UART_CSR)獲取當前狀態,當接收緩沖接收了一個完整字節的數據時,可讀取UART接收數據寄存器(UART_RDR)獲取接收數據,定義接收數據函數uart_getchar(),該函數返回接收的數據。
uint8_t uart_getchar(void)
{
while ( 0u == ( UART_STATUS_RX_DONE (UART1->CSR) ) ) /* Waiting rx buffer receives a complete byte of data. */
{}
return (uint8_t)(UART1->RDR 0xff);
}
UART輸出字符串 uart_putbuffer()
使用UART發送函數編寫發送字符串函數。
void uart_putbuffer(uint8_t *str)
{
while ((*str) != '?')
{
uart_putchar(*str);
str++;
}
}
main()函數
main()函數結合上述操作,不斷循環接收數據函數uart_getchar()與發送數據函數uart_putchar(),將接收到的數據發送出去,實驗現象如圖9所示,程序運行后串口輸出"uart_basic example.",通過串口調試工具輸入"mindmotion",UART輸出"mindmotion",輸入數據與輸出數據相同。
int main(void)
{
uint8_t c;
clock_init();
enable_clock();
pin_init();
uart_init();
uart_putbuffer((uint8_t *)"rnuart_basic example.rn");
while (1)
{
c = uart_getchar();
uart_putchar(c);
}
}
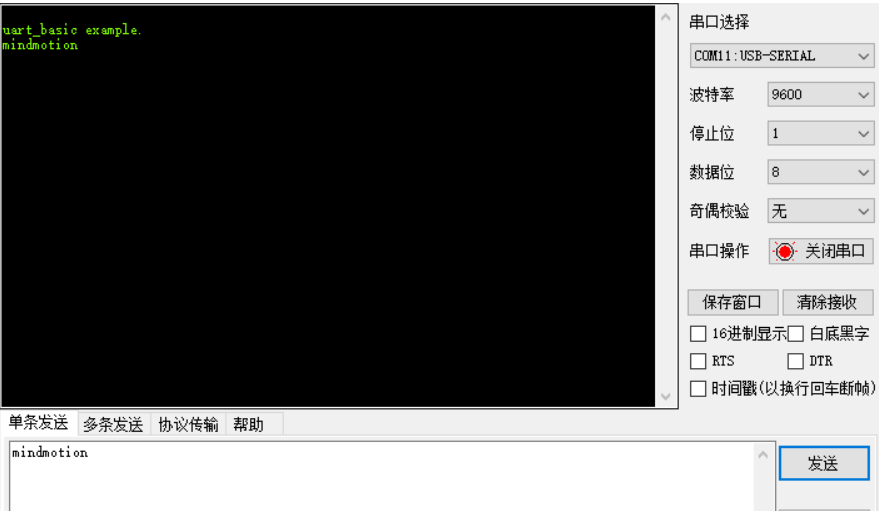 圖9. 實驗現象
圖9. 實驗現象
來源:靈動MM32MCU
-
收發器
+關注
關注
10文章
3454瀏覽量
106243 -
uart
+關注
關注
22文章
1243瀏覽量
101768 -
串行通信
+關注
關注
4文章
579瀏覽量
35583 -
GND
+關注
關注
2文章
540瀏覽量
38900
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論