 RGBD相機的標定和圖像配準
RGBD相機的標定和圖像配準
1
kinect2相機簡介
1、三種主要相機類型

2、常見的RGB-D相機

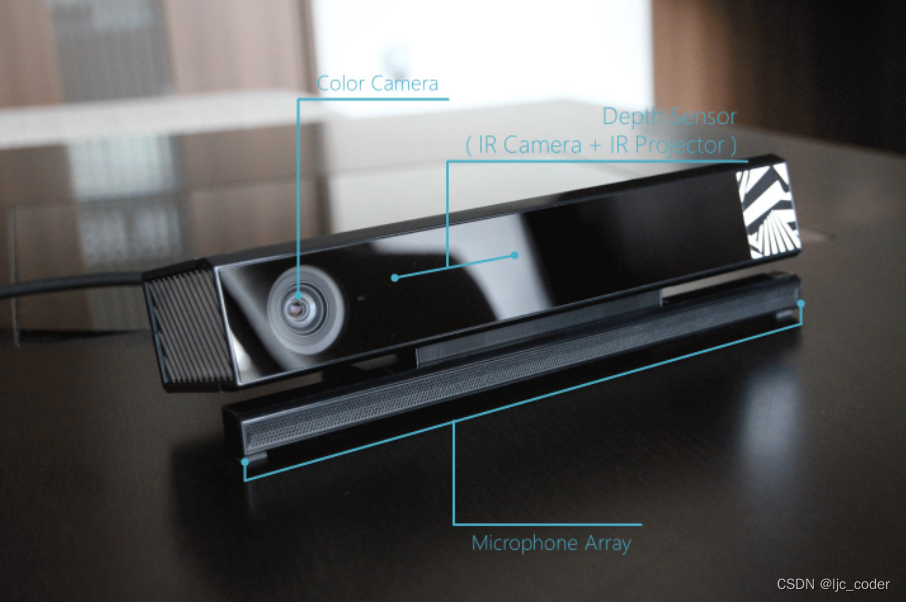
3、kinect2 相機
從左到右依次是:彩色攝像頭;紅外攝像頭(深度攝像頭),但這個要和再右邊的IR Project(紅外投射器)一起工作的;底下的長條是麥克風,可以感受到說話人的方向
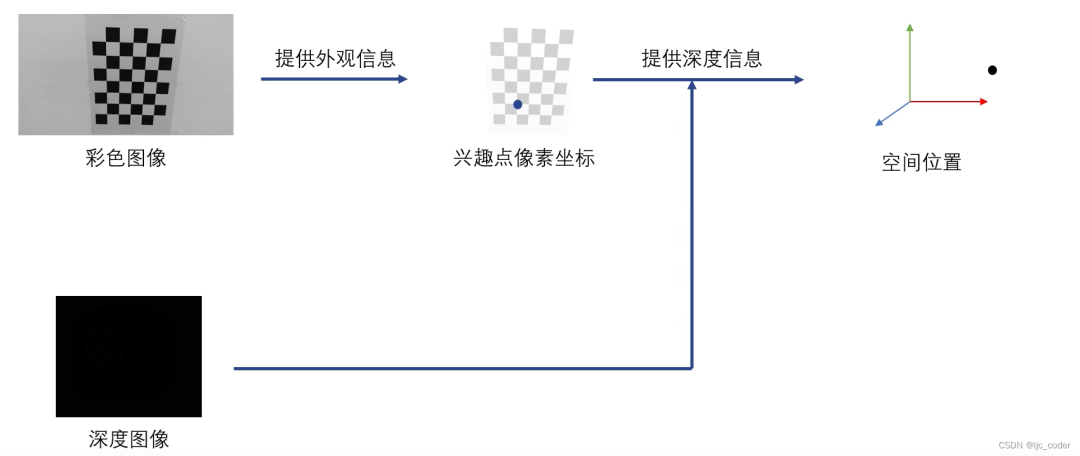
3.1使用RGB-D相機的好處
可以直接通過拍攝的深度圖得到物體的空間位置
3.2問題
keinect相機 彩色圖像是1920x1080的,但深度圖是512x414的,因此需要深度校準
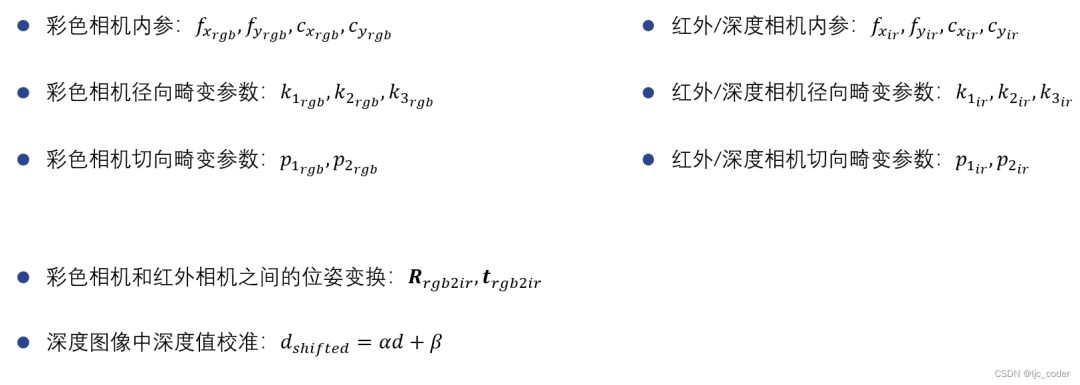
3.3實際標定得到的數據
2
內外參標定
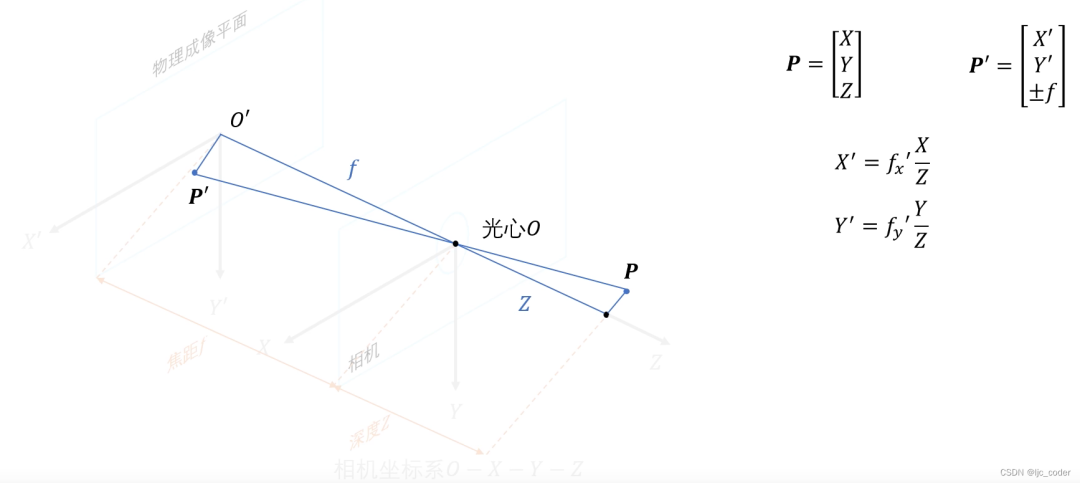
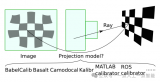
1、針孔相機投影模型
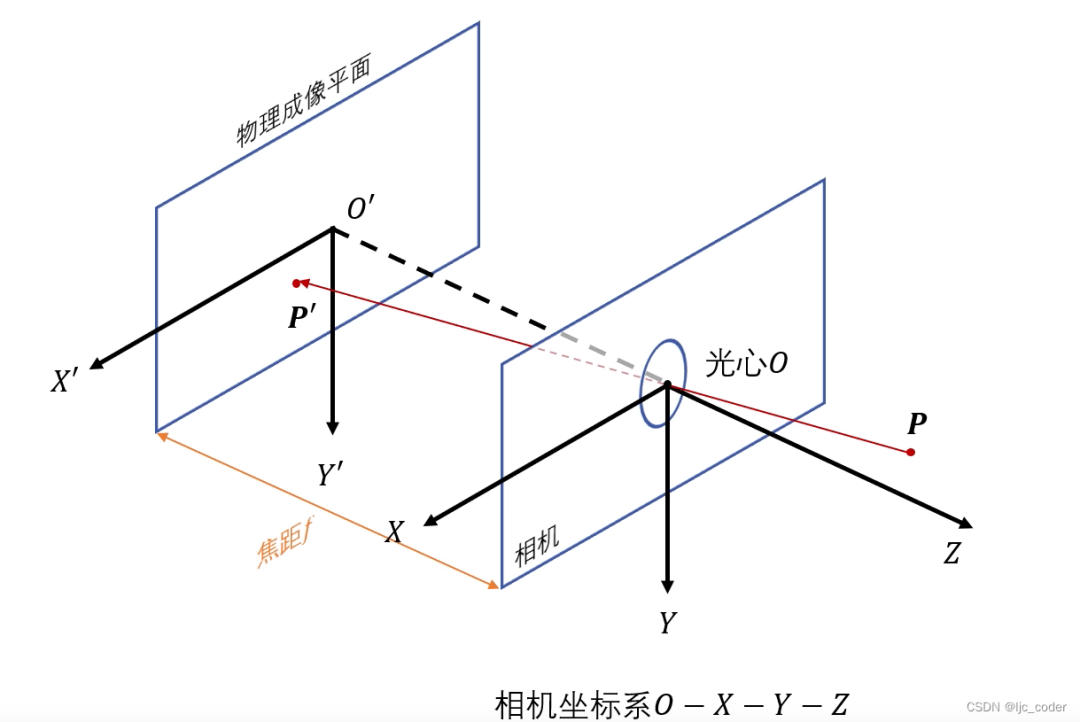
相機坐標系 -> 物理成像平面
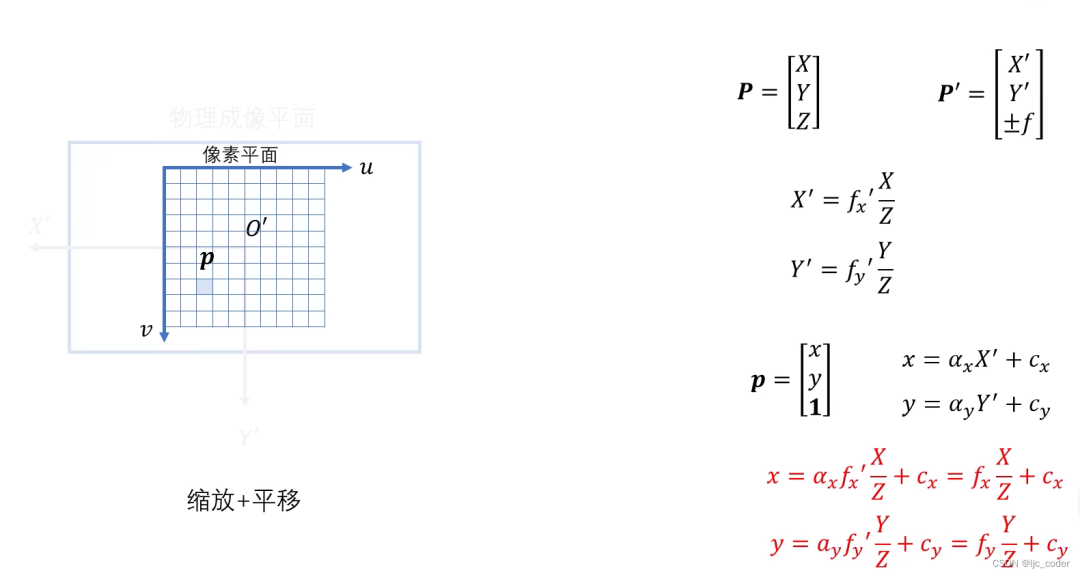
物理成像平面 -> 像素平面
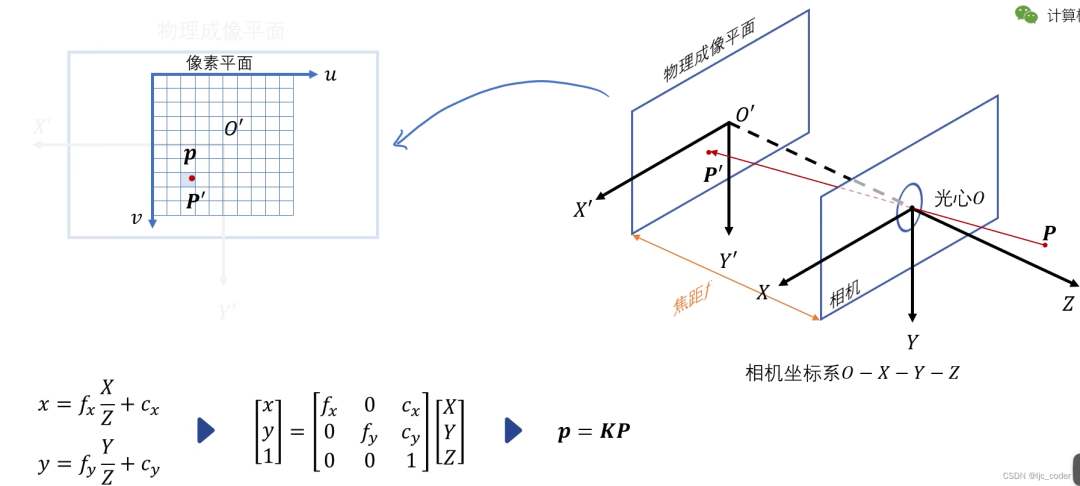
總結一下
整個投影過程都可以通過下面的內參矩陣描述 fx,fy,cx,cy
主要通過k1,k2,k3三個參數來描述相機的徑向畸變(常用k1,k2就夠了)
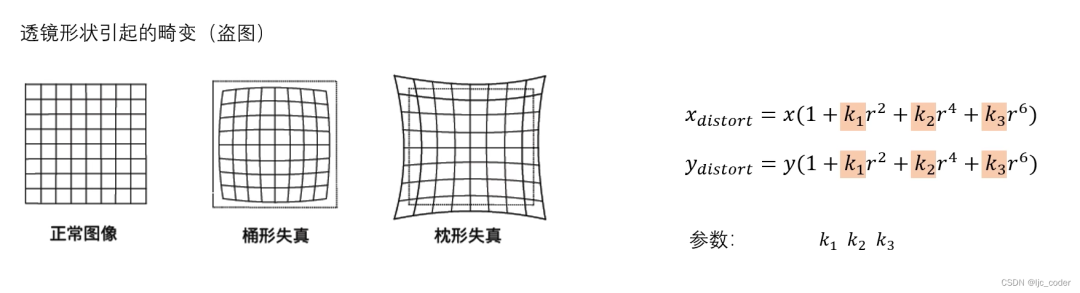
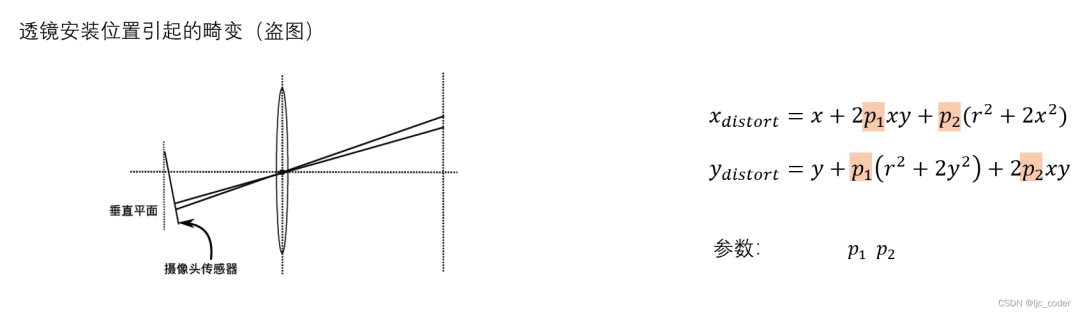
對于切向畸變,一般使用p1,p2來描述
2、工具
對于 kinect 可以用 iai_kinect2 工具包做標定
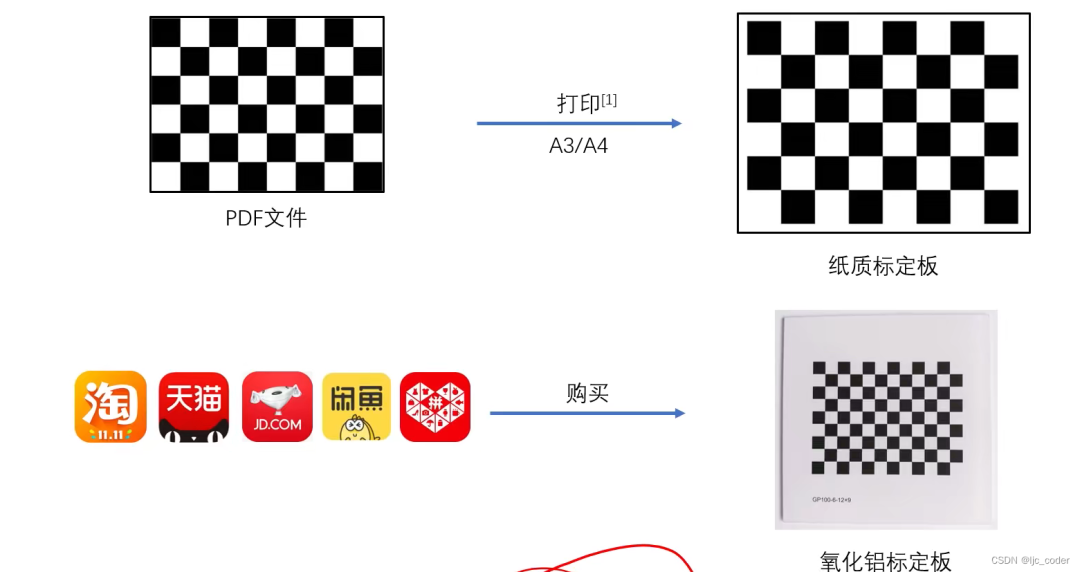
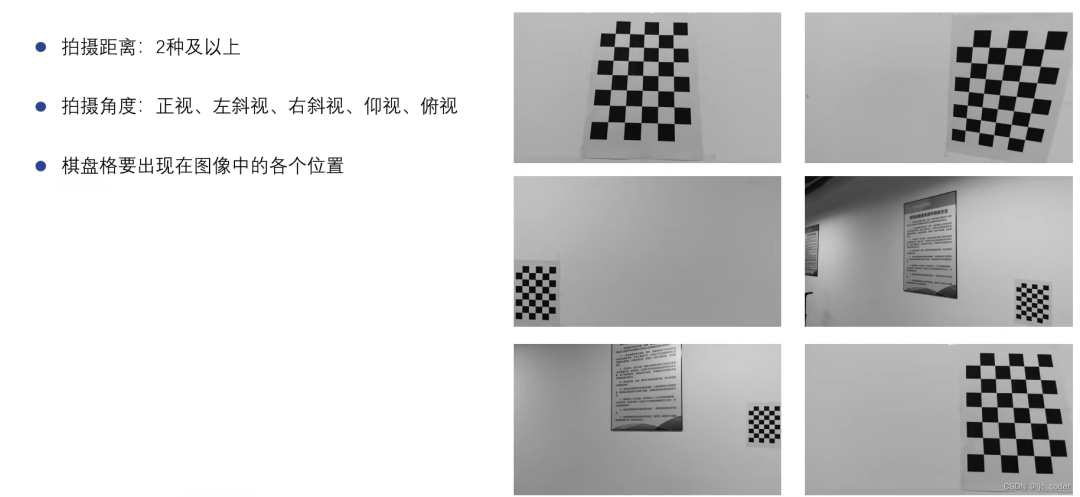
3、棋盤標定板
4、彩色相機標定
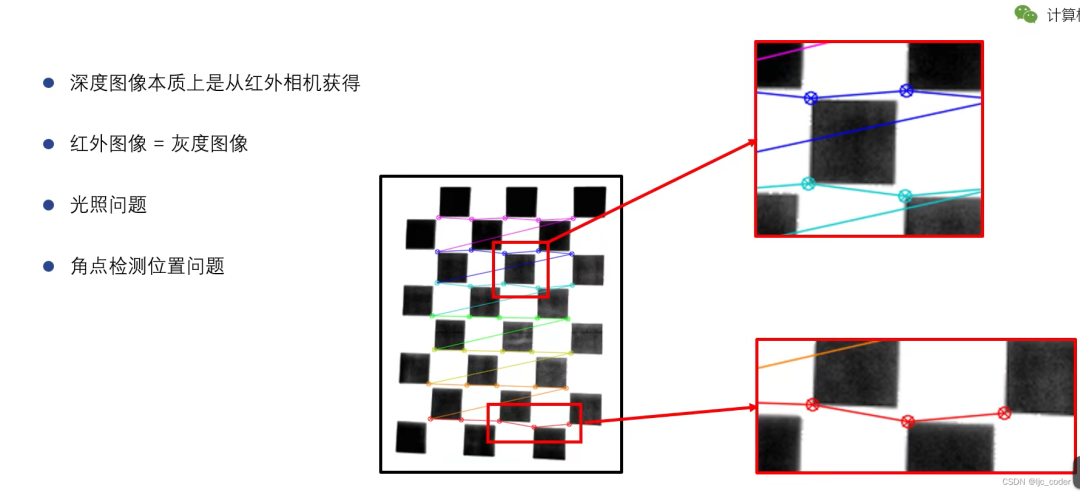
5、紅外相機標定
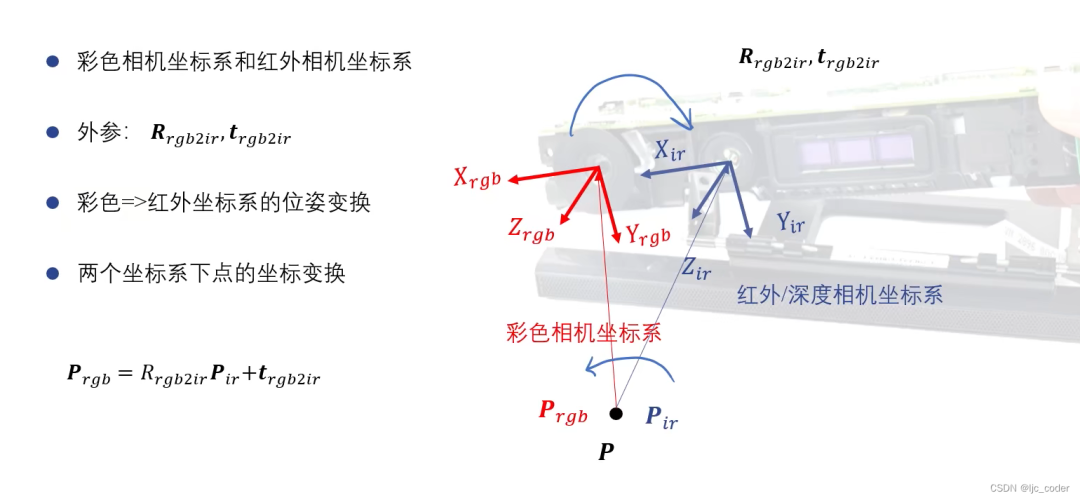
6、彩色相機和紅外相機的外參標定
描述深度坐標系下的點如何表示在RGB圖中
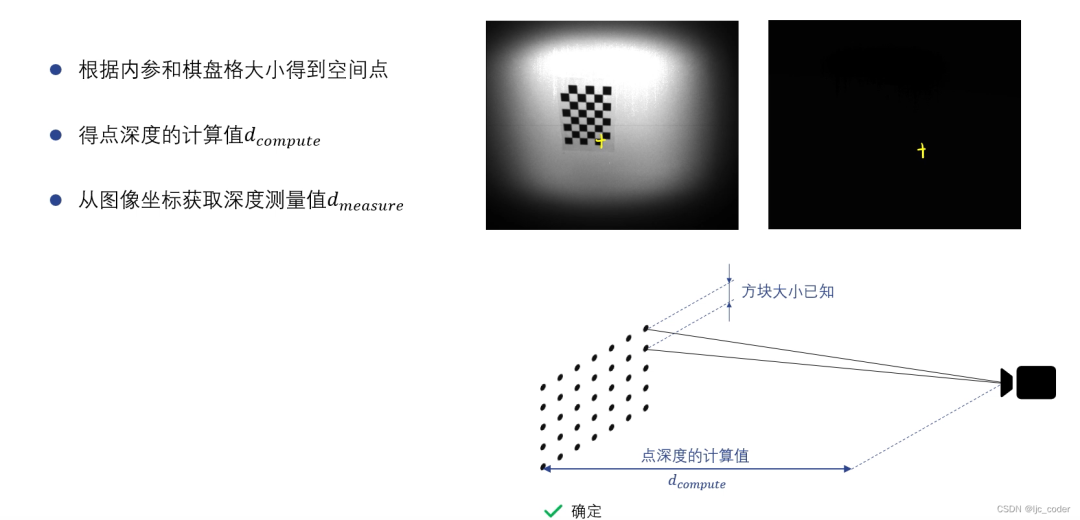
7、深度相機的深度校準
3
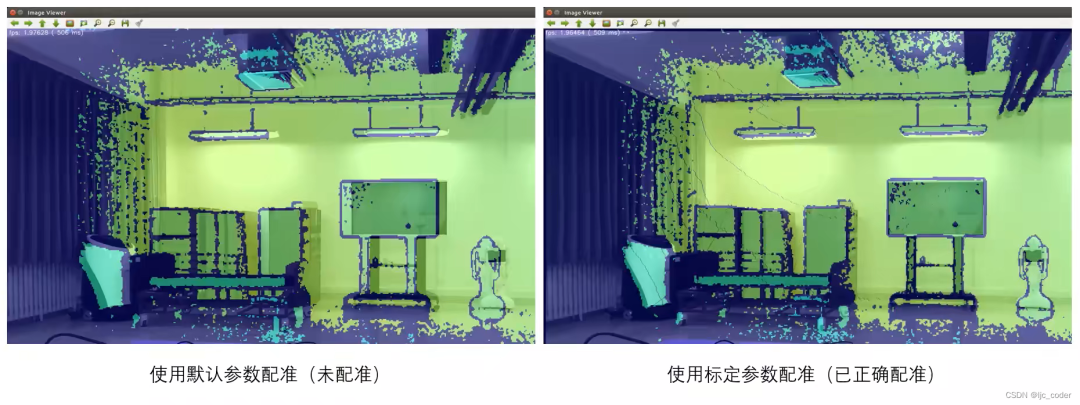
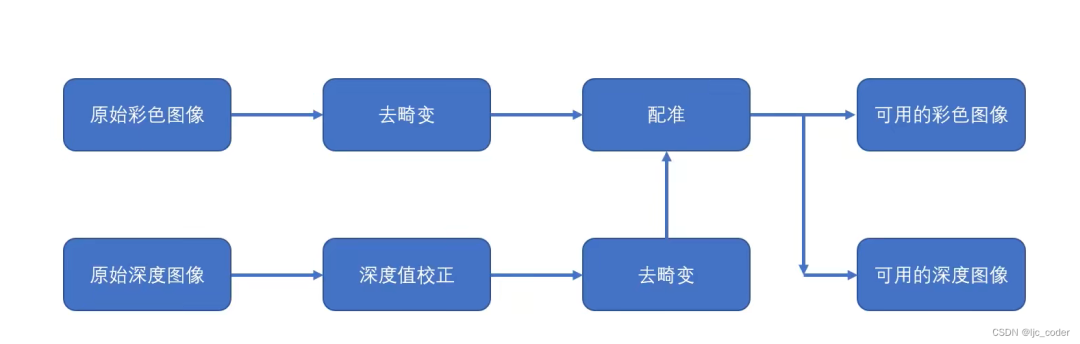
圖像配準
1、配準原理
(配準后的深度圖不對)
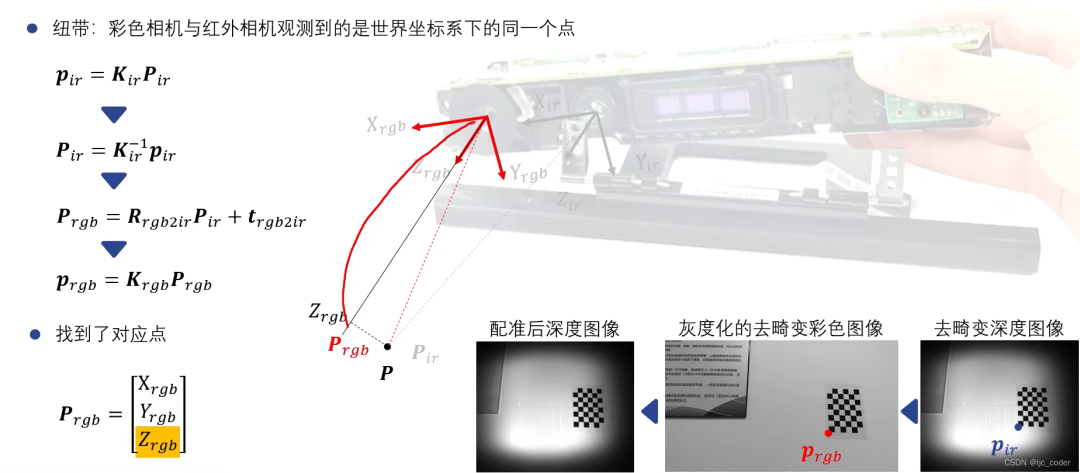
正確
4
總結
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
圖像
+關注
關注
2文章
1089瀏覽量
40573 -
相機
+關注
關注
4文章
1367瀏覽量
53914
原文標題:RGBD相機的標定和圖像配準
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于FPGA的GigE Vision相機圖像采集方案設計
1 概述 GigE Vision是一個比較復雜的協議,要在FPGA中完全實現具有較大的難度。如果FPGA作為接收端希望實現GigE Vision相機的配置和圖像采集功能,則只需要實現其中小部分功能


工業相機測長儀的組成部分
的視野范圍內時,通過追蹤型材兩端在圖像中所處的位置即可測得型材的長度。
在圖像處理方式的測量中,由于相機視野內中間和邊緣的物像比例存在差異,僅僅依靠像素比例無法達到精確測量。系統內外參數標定
發表于 08-27 17:45
工業相機該選擇哪種圖像采集卡?
在選擇與工業相機匹配的圖像采集卡時,需要考慮多個因素,包括相機的分辨率、接口類型、傳輸速度以及采集卡的兼容性、穩定性、性能等,具體選擇需要根據實際的應用場景和需求來確定。1.了解工業相機

簡述灰點工業相機的相關信息
灰點相機通過其獨特的鏡頭和成像系統,將光線捕捉并轉化為圖像。與傳統相機相比,灰點相機可能更注重圖像的質感和層次感,而非單純的清晰度。

技術指南丨深視智能3D相機上下對射測厚操作流程
變動了,如果改變了相機安裝位置,那么需要重新做一次3D標定。把掃描好的標定塊高度圖鏈接到圖像預處理模塊中,在高級設置里面


相機標定技術的性能分析與工具比較
相機在從遙感、測繪、機器人技術到內窺鏡等一系列應用中都是不可或缺的。這些應用通常需要了解相機中真實世界點和它們在圖像中的幾何關系。
發表于 04-30 09:28
?1084次閱讀
康謀技術 |深入探討:自動駕駛中的相機標定技術
隨著自動駕駛技術的快速發展,多傳感器的數據采集和融合可以顯著提高系統的冗余度和容錯性,進而保證決策的快速性和正確性。在項目開發迭代過程中,傳感器標定扮演著至關重要的角色,它位于數據采集平臺與感知融合

基于TOF深度相機的圖像處理專利獲授權
該專利主要涉及圖像處理技術領域,特別是針對基于TOF深度相機的圖像處理方法和存儲媒介進行了深入研究。其核心內容包括:首先,采集每個像素的初始實部數據與初始虛部數據;其次,通過將這些數據與當前數據相結合,生成特征數據;
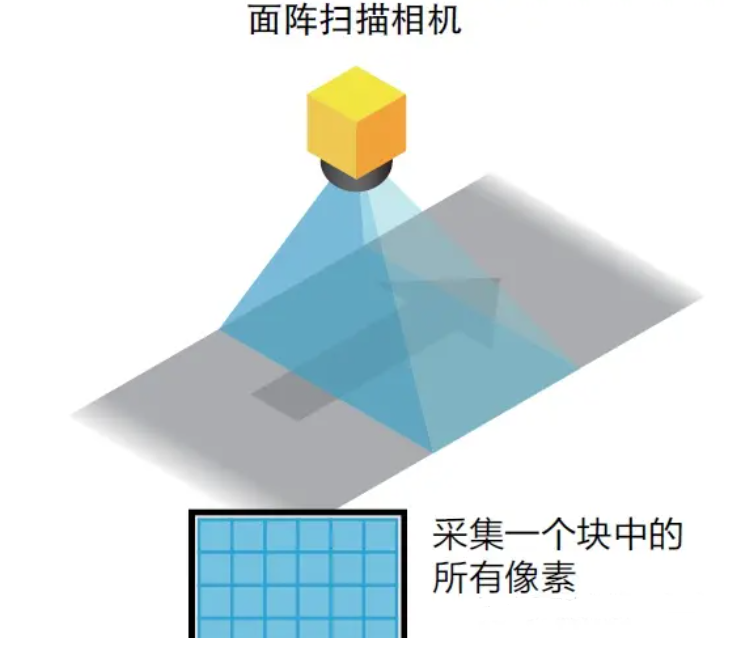
面陣相機的工作原理 線陣相機和面陣相機的區別在哪
面陣相機的工作原理 線陣相機和面陣相機的區別在哪 面陣相機是一種常用的光學成像設備,用于獲取靜態或動態的二維圖像。它由一個

面陣相機和線陣相機的區別
面陣相機按照芯片類型可以分為CCD相機和CMOS相機,按照其圖像傳感器的結構或排列方式的不同可以分為幀轉移、隔列轉移、線轉移以及全幀轉移四種類型。





 工商網監
工商網監
評論