") PEK-130模塊之三相正弦脈寬調(diào)變逆變器設(shè)計
PEK-130模塊之三相正弦脈寬調(diào)變逆變器設(shè)計
簡 述 :****
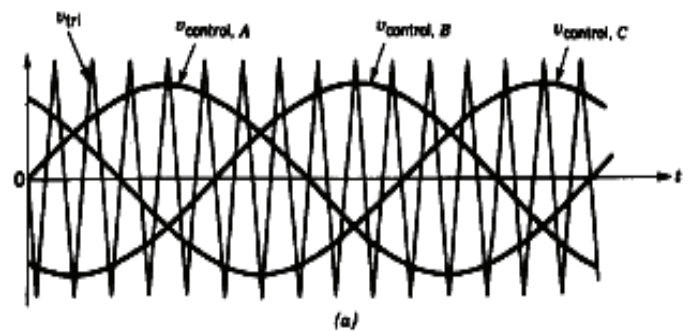
SPWM正弦脈寬度調(diào)變技術(shù)原理為由控制器產(chǎn)生的三相正弦波電壓命令與三角波做比較,經(jīng)過比較器,產(chǎn)生脈寬調(diào)變訊號驅(qū)動逆變器,并使其輸出近似正弦波且為等幅不等寬的電壓波形。根據(jù)正弦波電壓和三角波的大小和頻率,可定義為下列兩個指標(biāo),其一為調(diào)變指標(biāo) (Modulaton Index)為:
式中Vcontrol為三相正弦波電壓峰值大小,Vtri為三角波峰值的大小。
其二為頻率調(diào)變比(Frequency modulation ratio),定義為:
式中fs為三角波頻率,f1為正弦波電壓頻率。
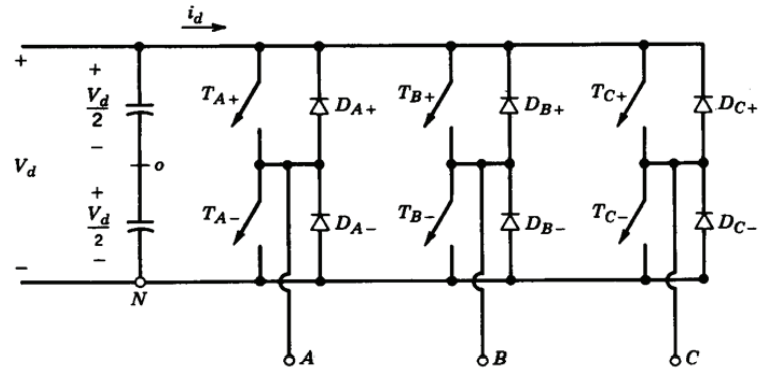
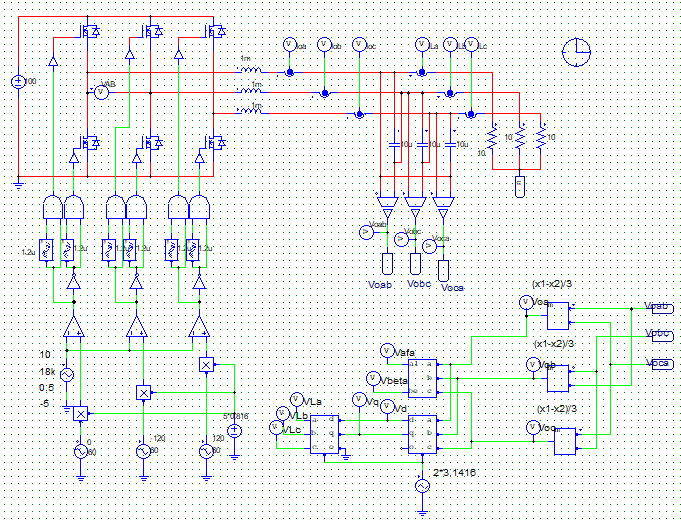
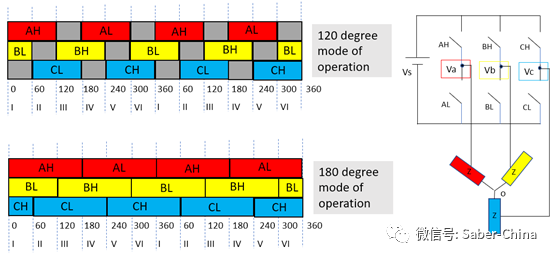
上圖為三相逆變器電路圖
三相SPWM :****
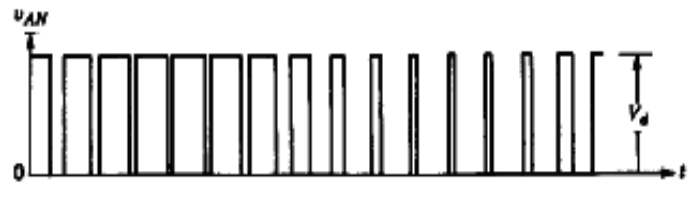
以A相為例,電壓VAN其基本波的峰值可用下式表示:
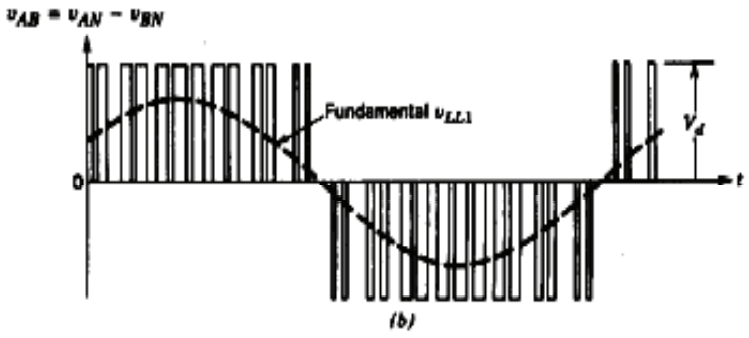
基本波線-線電壓大小(RMS)為:
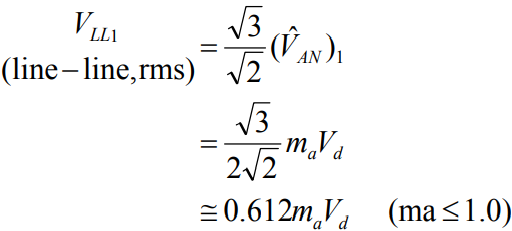
當(dāng)ma≤1時,稱為逆變器的線性調(diào)變區(qū),亦即當(dāng)輸入正弦波電壓命令的峰值比三角波峰值小時,輸入電壓大小會與逆變器輸出電壓基本波的線-線電壓大小成正比。其三角波與正弦波如下圖所示:
三相空間向量SVPWM:
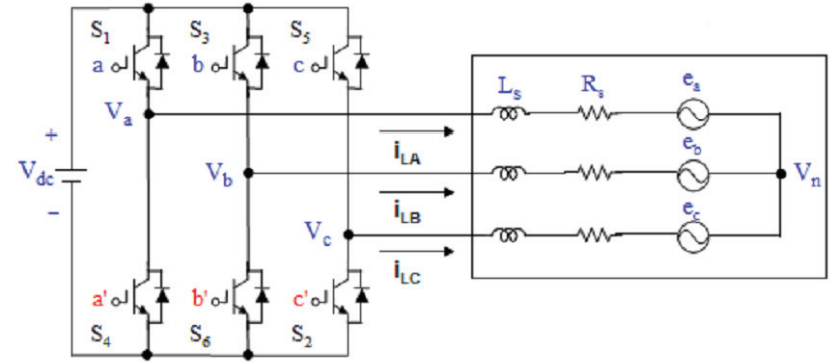
空間向量脈寬調(diào)變即是利用電壓空間向量的觀念,即由逆變器之六個功率組件的開關(guān)切換狀態(tài)來產(chǎn)生旋轉(zhuǎn)的電壓向量空間,典型的三相變頻器如圖所示,其每相各有兩個開關(guān)組件置于上臂及下臂,分別為上臂的S1、S3、S5及下臂的S2、S4、S6。在空間向量脈寬調(diào)變的控制模式下,逆變器每相開關(guān)組件的導(dǎo)通狀態(tài)為互補(bǔ)式,即代表若上臂導(dǎo)通則下臂截止,反之若上臂截止則下臂導(dǎo)通。在控制上通常在開關(guān)導(dǎo)通前加入一延遲時間以避免上臂與下臂功率組 件同時導(dǎo)通造成功率組件的損壞,此一延遲時間稱之為死區(qū)時間。在此定義開關(guān)導(dǎo)通狀態(tài)a、b、c相每一臂之開關(guān)導(dǎo)通狀態(tài),若a=1則代表上臂開關(guān)導(dǎo)通下臂開關(guān)截止,a = 0則代表上臂開關(guān)截止下臂開關(guān)導(dǎo)通。因此三相逆變器之輸出狀態(tài)共有八種,每一種狀態(tài)產(chǎn)生的線對線電壓,相電壓之輸出結(jié)果(直流鏈電壓為VDC)列于下表。
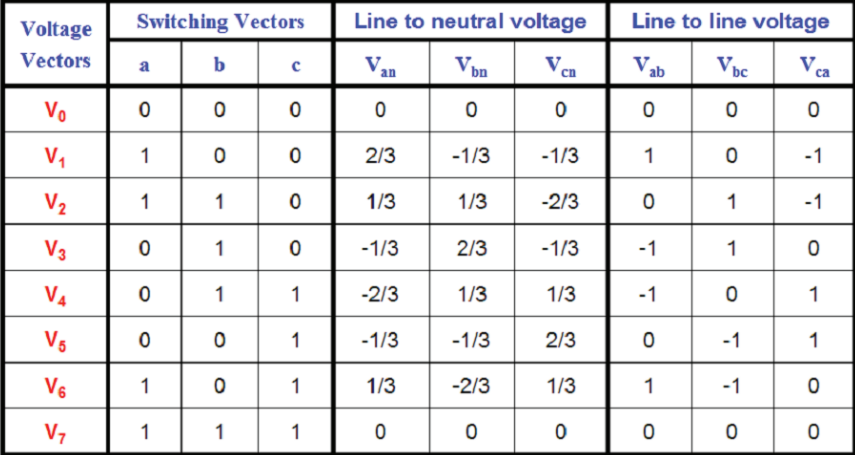
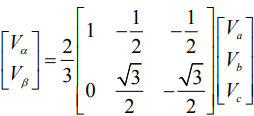
由上表可以得知,三相逆變器輸出之相電壓和線間電壓之關(guān)系,經(jīng)由坐標(biāo)軸轉(zhuǎn)換至αβ平面上可得下表,其轉(zhuǎn)換之關(guān)系式為:

因此即由此八種開關(guān)切換狀態(tài)將可得到八種不同的電壓向量。此八個電壓向量稱為基本電壓向量,分別為六個有效電壓向量V1、V2、V3、V4、V5、V6及兩個零向量V0及V7。因此可利用此六個有效電壓向量將電壓空間平面分為六個區(qū)間,如下圖所示。其中αβ平面之α軸及β軸乃相對于交流馬達(dá)定子之水平軸及垂直軸, Vref則為輸出之參考電壓向量。
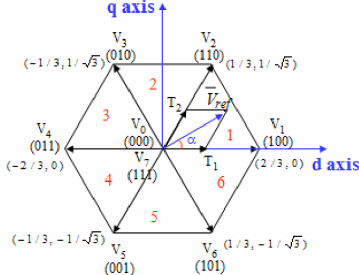
任何大小之輸出之參考電壓Vref可以用圖中六個有效電壓向量中之任兩個向量表示,而此輸出電壓在這兩個有效電壓向量之分量(導(dǎo)通時間)可用代數(shù)方法求得。
軸轉(zhuǎn)換:
靜止坐標(biāo)軸轉(zhuǎn)換:
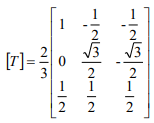
將三相abc靜止坐標(biāo)軸轉(zhuǎn)換至αβ靜止坐標(biāo)軸系統(tǒng),此轉(zhuǎn)換稱為Clark轉(zhuǎn)換。依據(jù)下圖所示兩個坐標(biāo)系統(tǒng)之間的關(guān)系,得出如下式的坐標(biāo)轉(zhuǎn)換式:
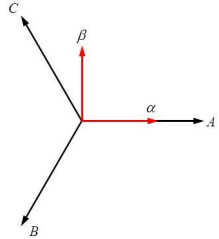

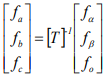
fa、fb、fo為電壓及電流等在αβ軸下的變數(shù)量
fa、fb、fc為電壓及電流等在abc軸下的變數(shù)量
反之,將坐標(biāo)軸αβ轉(zhuǎn)換至三相abc坐標(biāo)系統(tǒng),此轉(zhuǎn)換稱為反Clark轉(zhuǎn)換,轉(zhuǎn)換公式可表示:
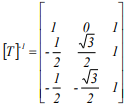
以上為由三相abc坐標(biāo)系統(tǒng)與靜止坐標(biāo)系統(tǒng)之間關(guān)系式,其轉(zhuǎn)換矩陣前的未定系數(shù),若是采用非功率不變法則此為3/2,
若是采用功率不變法則此為

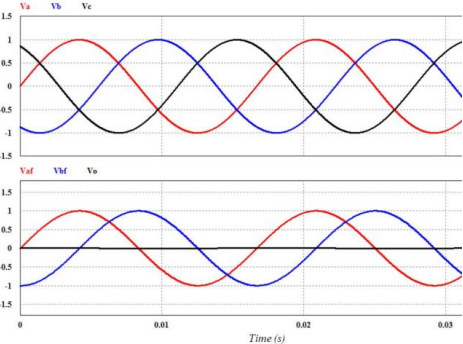
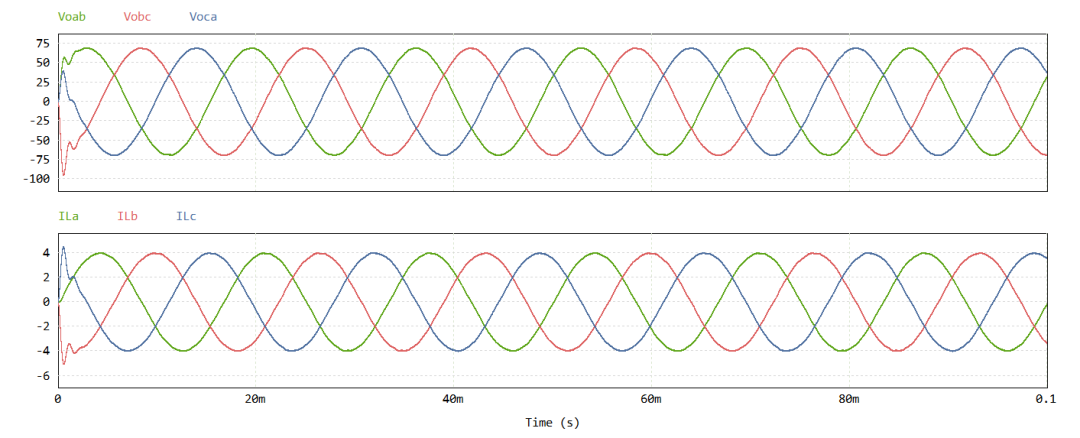
本文是采用非功率不變法則。此外,對于三相平衡系統(tǒng),因此在做靜止坐標(biāo)軸轉(zhuǎn)換時,零序分量是可被忽略的。下圖是采用PSIM仿真abc靜止坐標(biāo)軸轉(zhuǎn)換至αβ靜止坐標(biāo)軸之波形圖。
同步旋轉(zhuǎn)坐標(biāo)軸轉(zhuǎn)換:
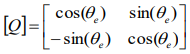
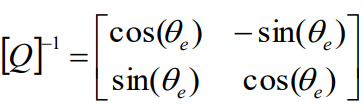
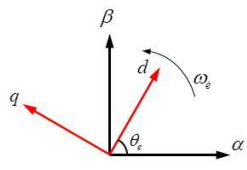
前一節(jié)透過坐標(biāo)軸轉(zhuǎn)換將abc靜止坐標(biāo)系統(tǒng)轉(zhuǎn)換至ab靜止坐標(biāo)軸系統(tǒng),本節(jié)進(jìn)一步將αβ靜止坐標(biāo)軸轉(zhuǎn)換至DQ同步旋轉(zhuǎn)坐標(biāo)軸系統(tǒng),此轉(zhuǎn)換稱為Park轉(zhuǎn)換,此時假設(shè)三相系統(tǒng)為平衡,零軸分量可被忽略,并將DQ軸與αβ軸同時放在二維向量平面上,如圖3.7 所示,此旋轉(zhuǎn)坐標(biāo)以ωe角速度來旋轉(zhuǎn),故可得坐標(biāo)轉(zhuǎn)換公式:
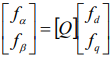
其中:
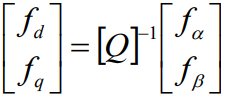
反之,將旋轉(zhuǎn)坐標(biāo)系統(tǒng)DQ軸轉(zhuǎn)換至ab坐標(biāo)系統(tǒng),此轉(zhuǎn)換稱為反Park轉(zhuǎn)換,則轉(zhuǎn)換公式可表示:
實驗驗證:
-
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8743瀏覽量
148031 -
控制器
+關(guān)注
關(guān)注
112文章
16445瀏覽量
179430 -
變頻器
+關(guān)注
關(guān)注
251文章
6584瀏覽量
145806 -
SPWM控制
+關(guān)注
關(guān)注
0文章
22瀏覽量
8605 -
三相正弦波逆變器
+關(guān)注
關(guān)注
0文章
2瀏覽量
1368
發(fā)布評論請先 登錄
相關(guān)推薦
如何在SaberRD中產(chǎn)生120°操作的三相逆變器脈呢?
三相逆變器可以通過查spwm正弦表產(chǎn)生spwm控制信號嗎?
降低三相IGBT逆變器設(shè)計系統(tǒng)成本的方法
如何利用三相逆變器控制電機(jī)
諧振逆變器三相電路的原理是什么
三相SPWM逆變電路的設(shè)計
基于fpga的三相逆變器系統(tǒng)設(shè)計
單相方波逆變器的脈寬設(shè)計

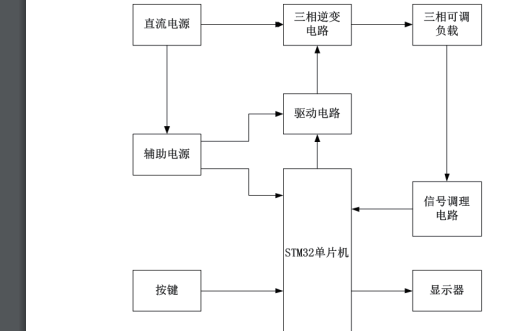
如何使用STM32單片機(jī)進(jìn)行三相逆變器的設(shè)計






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論