 監控機器人運動的過程條件FB ONL/FB PSPS
監控機器人運動的過程條件FB ONL/FB PSPS
運動條件被用來阻止機器人。
機器人只有在完全滿足編程運動條件的情況下才能移動。
在線形式FB ONL和FB PSPS可用。FB表示運動條件。
運動條件保持活動,直到執行新的運動條件指令為止。
運動條件指令在程序結束時重置。
對運動條件編程FB ONL
FB ONL插入點PLC的起始處,沒有行號。
在到達終點的途中對運動狀況進行監測。
使用內聯形式FB ONL編程

| 1 | 1操作員_, ( |
| 2 |
2操作員 如果選擇了操作數EIN(ON)和AUS(OFF),則輸入框不可用。! |
| 3 | 布爾操作數(條件)EIN (ON), AUS (OFF), E, A, M, F, T, S |
| 4 |
操作數。如果選擇了操作和EIN(ON)和AUS(OFF),則輸入框不可用。 ? 值的范圍:取決于操作數 |
| 5 | 操作人員) |
運動內聯形式被擴展為包括形式末尾的字母F。
PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s] F
FB ONL = E12
帶有FB ONL的示例程序
1 ...
2 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s]
3 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s] F
FB ONL = E12
4 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s]
5 ...
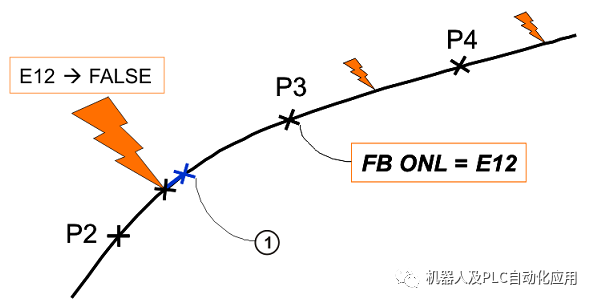
如果輸入12設置為AUS(FALSE)(斜坡下降制動),則機器人停止在路徑上。
編程運動條件FB PSPS
? 多個FB PSPS可以在一個Point PLC中編程。
? 運動條件FB PSPS從編程的點PLC中的線路激活。
? 使用內聯形式FB PSPS編程

| 1 | 1操作員_, ( |
| 2 |
2操作員 如果選擇了操作數EIN(ON)和AUS(OFF),則輸入框不可用。! |
| 3 | 布爾操作數(條件)EIN (ON), AUS (OFF), E, A, M, F, T, S |
| 4 |
操作數。如果選擇了操作和EIN(ON)和AUS(OFF),則輸入框不可用。 ? 值的范圍:取決于操作數 |
| 5 | 操作人員) |
當使用點PLC時,運動內聯形式被擴展為包括形式結尾處的字母P。
PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s] P
1: FB PSPS = E12
帶有FB PSPS的示例程序
1 ...
2 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s]
3 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s] P
1: FB PSPS = E12
4 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s]
5 ...
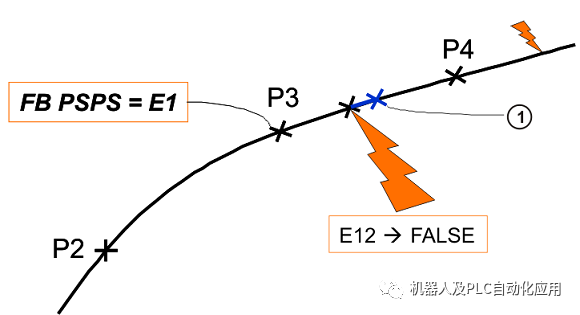
如果輸入12設置為AUS(FALSE)(斜坡下降制動),則機器人停止在路徑上。
運動狀態編程監測程序:
1.選擇運動。
2.通過按下PLC打開軟鍵打開點PLC。
3.選擇軟鍵“命令”>“Warte/FB”>“FB ONL”或“FB PSPS”。
4.以內聯形式設置參數。
5.使用Cmd Ok保存指令。
-
機器人
+關注
關注
211文章
28641瀏覽量
208399 -
plc
+關注
關注
5016文章
13387瀏覽量
465381 -
編程
+關注
關注
88文章
3637瀏覽量
93981
原文標題:大眾KUKA機器人程序中:監控機器人運動的過程條件FB ONL/FB PSPS
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
樹莓派打造視頻監控機器人Verybot
機器人視覺——機器人的“眼睛”
機器人的主要技術參數
工業機器人的工作原理
機器人運動控制技術
移動機器人的三種主要運動系統
機器人的控制系統
機器人運動過程等待條件FB SPS的結合BRAKE深入分析
控制KUKA安全機器人的PLC標準功能塊FB 292







 工商網監
工商網監
評論