") 數據增強使用的傳統(tǒng)算法方法
數據增強使用的傳統(tǒng)算法方法
論文鏈接:https://arxiv.org/ftp/arxiv/papers/1910/1910.13796.pdf
深度學習擴展了數字圖像處理的邊界。然而,這并不代表在深度學習崛起之前不斷發(fā)展進步的傳統(tǒng)計算機視覺技術被淘汰。近期,來自愛爾蘭垂利理工學院的研究者發(fā)表論文,分析了這兩種方法的優(yōu)缺點。 該論文旨在促進人們對是否保留經典計算機視覺技術知識進行討論。此外,這篇論文還探討了如何結合傳統(tǒng)計算機視覺與深度學習。文中提及了多個近期混合方法,這些方法既提升了計算機視覺性能,又解決了不適合深度學習的問題。例如,將傳統(tǒng)計算機視覺技術與深度學習結合已經在很多新興領域流行起來,如深度學習模型尚未得到充分優(yōu)化的全視野、3D 視覺領域。
深度學習 VS 傳統(tǒng)計算機視覺
深度學習的優(yōu)勢 深度學習的快速發(fā)展和設備能力的改善(如算力、內存容量、能耗、圖像傳感器分辨率和光學器件)提升了視覺應用的性能和成本效益,并進一步加快了此類應用的擴展。與傳統(tǒng) CV 技術相比,深度學習可以幫助 CV 工程師在圖像分類、語義分割、目標檢測和同步定位與地圖構建(SLAM)等任務上獲得更高的準確率。由于深度學習所用的神經網絡是訓練得到而非編程得到,因此使用該方法的應用所需的專家分析和微調較少,且能夠處理目前系統(tǒng)中的海量可用視頻數據。深度學習還具備絕佳的靈活性,因為對于任意用例,CNN 模型和框架均可使用自定義數據集重新訓練,這與 CV 算法不同,后者具備更強的領域特定性。
以移動機器人的目標檢測問題為例,對比這兩類計算機視覺算法: 傳統(tǒng)計算機視覺方法使用成熟的 CV 技術處理目標檢測問題,如特征描述子(SIFT、SUR、BRIEF 等)。在深度學習興起前,圖像分類等任務需要用到特征提取步驟,特征即圖像中「有趣」、描述性或信息性的小圖像塊。這一步可能涉及多種 CV 算法,如邊緣檢測、角點檢測或閾值分割算法。從圖像中提取出足夠多的特征后,這些特征可形成每個目標類別的定義(即「詞袋」)。部署階段中,在其他圖像中搜索這些定義。如果在一張圖像中找到了另一張圖像詞袋中的絕大多數特征,則該圖像也包含同樣的目標(如椅子、馬等)。
傳統(tǒng) CV 方法的缺陷是:從每張圖像中選擇重要特征是必要步驟。而隨著類別數量的增加,特征提取變得越來越麻煩。要確定哪些特征最能描述不同的目標類別,取決于 CV 工程師的判斷和長期試錯。此外,每個特征定義還需要處理大量參數,所有參數必須由 CV 工程師進行調整。 深度學習引入了端到端學習的概念,即向機器提供的圖像數據集中的每張圖像均已標注目標類別。因而深度學習模型基于給定數據「訓練」得到,其中神經網絡發(fā)現圖像類別中的底層模式,并自動提取出對于目標類別最具描述性和最顯著的特征。人們普遍認為 DNN 的性能大大超過傳統(tǒng)算法,雖然前者在計算要求和訓練時間方面有所取舍。隨著 CV 領域中最優(yōu)秀的方法紛紛使用深度學習,CV 工程師的工作流程出現巨大改變,手動提取特征所需的知識和專業(yè)技能被使用深度學習架構進行迭代所需的知識和專業(yè)技能取代(見圖 1)。
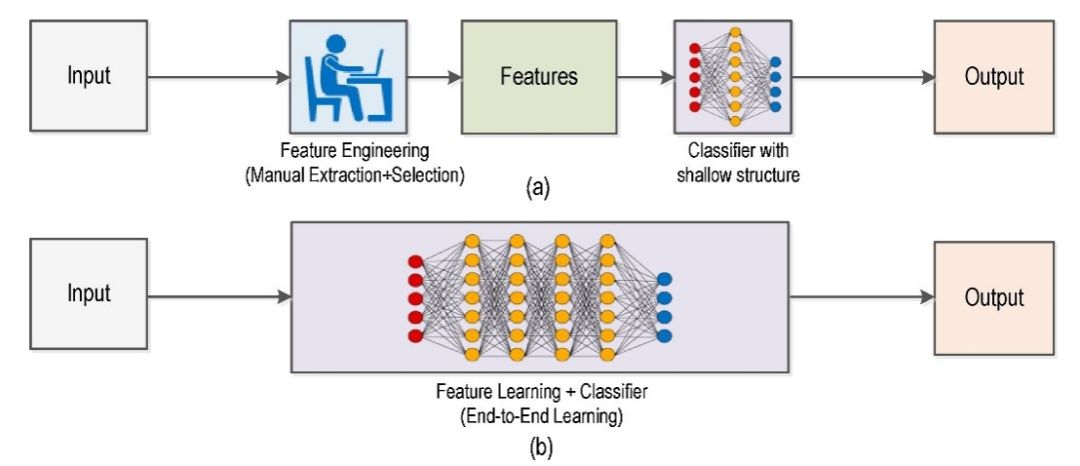 圖 1:a)傳統(tǒng)計算機視覺工作流 vs b)深度學習工作流。(圖源:[8]) ? 近年來,CNN 的發(fā)展對 CV 領域產生了巨大影響,也使得目標識別能力出現大幅提升。這種爆發(fā)與算力的提升、訓練數據量的增加密不可分。近期 CV 領域中深度神經網絡架構出現井噴并得到廣泛應用,這從論文《ImageNet Classification with Deep Convolutional Neural Networks》引用量超 3000 次中可見一斑。
圖 1:a)傳統(tǒng)計算機視覺工作流 vs b)深度學習工作流。(圖源:[8]) ? 近年來,CNN 的發(fā)展對 CV 領域產生了巨大影響,也使得目標識別能力出現大幅提升。這種爆發(fā)與算力的提升、訓練數據量的增加密不可分。近期 CV 領域中深度神經網絡架構出現井噴并得到廣泛應用,這從論文《ImageNet Classification with Deep Convolutional Neural Networks》引用量超 3000 次中可見一斑。
CNN 利用卷積核(又稱濾波器)來檢測圖像中的特征(如邊)。卷積核是權重矩陣,這些權重被訓練用于檢測特定特征。如名字所示,CNN 的主要思想是在給定輸入圖像上空間性地卷積內核,檢查是否出現檢測所需特征。為了用數值表示出現某個特征的置信度,神經網絡執(zhí)行卷積操作,即計算卷積核與它和輸入圖像重疊區(qū)域的點積(卷積核正在查看的原始圖像區(qū)域叫做感受野)。
為了促進卷積核權重的學習,研究人員向卷積層的輸出添加偏置項,并饋入非線性激活函數中。激活函數通常是非線性函數,如 Sigmoid、TanH 和 ReLU。激活函數的選擇取決于數據和分類任務的性質。例如,ReLU 具備更多生物表征(大腦中的神經元是否處于激活狀態(tài))。因此,在圖像識別任務中,ReLU 會得到更好的結果,因為它對梯度消失問題具備更強的抵抗力,而且它能夠輸出更稀疏、高效的表征。
為了加速訓練過程,減少網絡消耗的內存量,卷積層后通常跟著一個池化層,用于移除輸入特征中的冗余部分。例如,最大池化在輸入上移動窗口,僅輸出窗口中的最大值,從而高效減少圖像中的冗余部分,留下重要像素。如圖 2 所示,深度 CNN 可能具備多對卷積和池化層。最后,全連接層將上一層壓縮為特征向量,然后輸出層利用密集網絡計算輸出類別/特征的分數(置信度或概率)。將該輸出輸入到回歸函數中,如 Softmax 函數,它將所有事物映射為向量且其中所有元素的總和為 1。
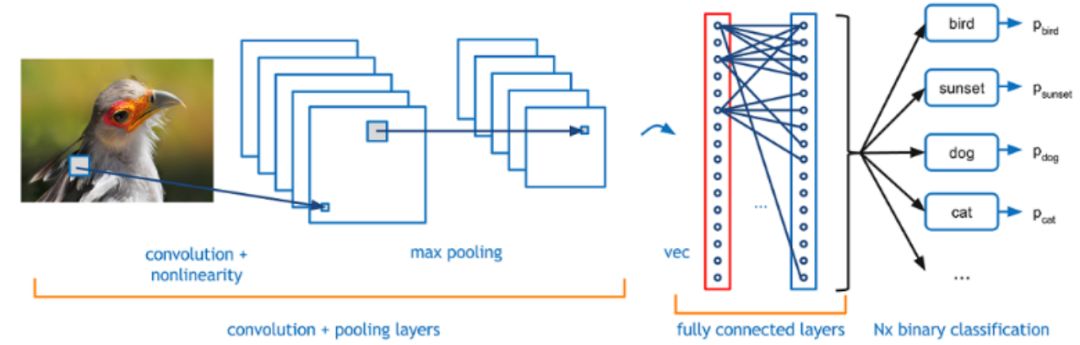 圖 2:CNN 構造塊。(圖源:[13]) ? 但是深度學習仍然只是 CV 領域的工具。例如,CV 領域中最常用的神經網絡是 CNN。那么什么是卷積呢?卷積廣泛應用于圖像處理技術。(深度學習的優(yōu)點很明確,本文暫不討論當前最優(yōu)算法。)但深度學習并非解決所有問題的萬靈藥,下文將介紹傳統(tǒng) CV 算法更適合的問題及應用。
圖 2:CNN 構造塊。(圖源:[13]) ? 但是深度學習仍然只是 CV 領域的工具。例如,CV 領域中最常用的神經網絡是 CNN。那么什么是卷積呢?卷積廣泛應用于圖像處理技術。(深度學習的優(yōu)點很明確,本文暫不討論當前最優(yōu)算法。)但深度學習并非解決所有問題的萬靈藥,下文將介紹傳統(tǒng) CV 算法更適合的問題及應用。
傳統(tǒng) CV 技術的優(yōu)勢
這部分將詳細介紹基于特征的傳統(tǒng)方法在 CV 任務中能夠有效提升性能的原因。這些傳統(tǒng)方法包括:
尺度不變特征變換(Scale Invariant Feature Transform,SIFT)[14]
加速穩(wěn)健特征(Speeded Up Robust Feature,SURF)[15]
基于加速分割測試的特征(Features from Accelerated Segment Test,FAST)[16]
霍夫變換(Hough transform)[17]
幾何哈希(Geometric hashing)[18]
特征描述子(如 SIFT 和 SURF)通常與傳統(tǒng)機器學習分類算法(如支持向量機和 K 最近鄰算法)結合使用,來解決 CV 問題。
深度學習有時會「過猶不及」,傳統(tǒng) CV 技術通常能夠更高效地解決問題,所用的代碼行數也比深度學習少。SIFT,甚至簡單的色彩閾值和像素計數等算法,都不是特定于某個類別的,它們是通用算法,可對任意圖像執(zhí)行同樣的操作。與之相反,深度神經網絡學得的特征是特定于訓練數據的。也就是說,如果訓練數據集的構建出現問題,則網絡對訓練數據集以外的圖像處理效果不好。
因此,SIFT 等算法通常用于圖像拼接/3D 網格重建等應用,這些應用不需要特定類別知識。這些任務也可以通過訓練大型數據集來實現,但是這需要巨大的研究努力,為一個封閉應用費這么大勁并不實際。在面對一個 CV 應用時,工程師需要培養(yǎng)選擇哪種解決方案的常識。例如,對流水線傳送帶上的兩類產品進行分類,一類是紅色一類是藍色。深度神經網絡需要首先收集充足的訓練數據。然而,使用簡單的色彩閾值方法也能達到同樣的效果。一些問題可以使用更簡單、快速的技術來解決。
如果 DNN 對訓練數據以外的數據效果不好,怎么辦?在訓練數據集有限的情況下,神經網絡可能出現過擬合,無法進行有效泛化。手動調參是非常困難的事情,因為 DNN 擁有數百萬參數,且它們之間的關系錯綜復雜。也因此,深度學習模型被批評為黑箱。傳統(tǒng)的 CV 技術具備充分的透明性,人們可以判斷解決方案能否在訓練環(huán)境外有效運轉。CV 工程師了解其算法可以遷移至的問題,這樣一旦什么地方出錯,他們可以執(zhí)行調參,使算法能夠有效處理大量圖像。
現在,傳統(tǒng) CV 技術常用于解決簡單問題,這樣它們可在低成本微處理器上部署,或者通過突出數據中的特定特征、增強數據或者輔助數據集標注,來限定深度學習技術能解決的問題。本文稍后將討論,在神經網絡訓練中可使用多少種圖像變換技術。最后,CV 領域存在很多更具挑戰(zhàn)性的難題,比如機器人學、增強現實、自動全景拼接、虛擬現實、3D 建模、運動估計、視頻穩(wěn)定、運動捕捉、視頻處理和場景理解,這些問題無法通過深度學習輕松實現,但它可以從傳統(tǒng) CV 技術中受益。
傳統(tǒng) CV 技術與深度學習的融合
傳統(tǒng) CV+深度學習=更好的性能
傳統(tǒng) CV 技術和深度學習方法之間存在明確的權衡。經典 CV 算法成熟、透明,且為性能和能效進行過優(yōu)化;深度學習提供更好的準確率和通用性,但消耗的計算資源也更大。
混合方法結合傳統(tǒng) CV 技術和深度學習,兼具這兩種方法的優(yōu)點。它們尤其適用于需要快速實現的高性能系統(tǒng)。
機器學習度量和深度網絡的混合已經非常流行,因為這可以生成更好的模型。混合視覺處理實現能夠帶來性能優(yōu)勢,且將乘積累加運算減少到深度學習方法的 130-1000 分之一,幀率相比深度學習方法有 10 倍提升。此外,混合方法使用的內存帶寬僅為深度學習方法的一半,消耗的 CPU 資源也少得多。
充分利用邊緣計算
當算法和神經網絡推斷要在邊緣設備上運行時,其延遲、成本、云存儲和處理要求比基于云的實現低。邊緣計算可以避免網絡傳輸敏感或可確認數據,因此具備更強的隱私性和安全性。
結合了傳統(tǒng) CV 和深度學習的混合方法充分利用邊緣設備上可獲取的異質計算能力。異質計算架構包含 CPU、微控制器協同處理器、數字信號處理器(DSP)、現場可編程邏輯門陣列(FPGA)和 AI 加速設備,通過將不同工作負載分配給最高效的計算引擎來降低能耗。測試實現證明,在 DSP 和 CPU 上分別執(zhí)行深度學習推斷時,前者的目標檢測延遲是后者的十分之一。
多種混合方法證明了其在邊緣應用上的優(yōu)勢。使用混合方法能夠高效地整合來自邊緣節(jié)點傳感器的數據。
不適合深度學習的問題
CV 領域中存在一些難題,如機器人學、增強現實、自動全景拼接、虛擬現實、3D 建模、運動估計、視頻穩(wěn)定、運動捕捉、視頻處理和場景理解,它們很難通過深度學習以可微方式輕松實現,而是需要使用其他「傳統(tǒng)」技術。
下文介紹了 CV 領域中的一些新興問題,在這些問題中深度學習面臨新挑戰(zhàn),而經典 CV 技術能夠發(fā)揮更大作用。
3D 視覺
3D 輸入的內存大小比傳統(tǒng)的 RGB 圖像大得多,卷積核必須在三維輸入空間中執(zhí)行卷積(見圖 3)。 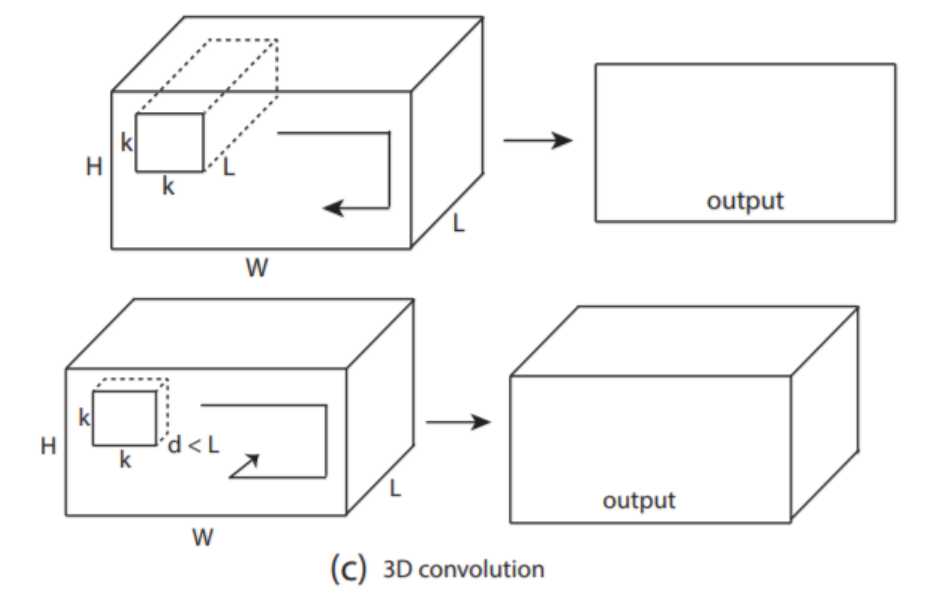 圖 3:2D CNN vs. 3D CNN [47] ? 因此,3D CNN 的計算復雜度隨著分辨率呈現三次方增長。相比于 2D 圖像處理,3D CV 更難,因為增加的維度使得不確定性也隨之增加,如遮擋和不同的攝像頭角度(見圖 4)。 ? ?
圖 3:2D CNN vs. 3D CNN [47] ? 因此,3D CNN 的計算復雜度隨著分辨率呈現三次方增長。相比于 2D 圖像處理,3D CV 更難,因為增加的維度使得不確定性也隨之增加,如遮擋和不同的攝像頭角度(見圖 4)。 ? ?
下一節(jié)將涉及處理多種 3D 數據表征的解決方案,這些方法具備新架構和預處理步驟,專用于解決上述挑戰(zhàn)。
幾何深度學習(GDL)將深度學習技術擴展到 3D 數據。3D 數據的表征方式多種多樣,總體上可分為歐幾里得和非歐幾里得。3D 歐幾里得結構化數據具備底層網格結構,允許全局參數化,此外,它還具備和 2D 圖像相同的坐標系統(tǒng)。這使得現有的 2D 深度學習范式和 2D CNN 可應用于 3D 數據。3D 歐幾里得數據更適合通過基于體素的方法分析簡單的剛性物體,如椅子、飛機等。另一方面,3D 非歐幾里得數據不具備網格數組結構,即不允許全局參數化。因此,將經典深度學習技術擴展到此類表征是非常難的任務,近期 [52] 提出的 Pointnet 解決了這個難題。 對目標識別有用的連續(xù)形狀信息常常在轉換為體素表征的過程中丟失。使用傳統(tǒng) CV 算法,[53] 提出可應用于體素 CNN(voxel CNN)的一維特征。這種基于平均曲率的新型旋轉不變特征提升了體素 CNN 的形狀識別性能。該方法應用到當前最優(yōu)的體素 CNN Octnet 架構時取得了極大成功,它在 ModelNet10 數據集上取得了 1% 的整體準確率提升。
SLAM 視覺 SLAM 是 SLAM 的子集,它使用視覺系統(tǒng)(而非激光雷達)登記場景中的路標。視覺 SLAM 具備攝影測量的優(yōu)勢(豐富的視覺數據、低成本、輕量級和低能耗),且沒有后處理通常需要的繁重計算工作負載。視覺 SLAM 包含環(huán)境感知、數據匹配、運動估計、位置更新和新路標登記等步驟。 對在不同條件(如 3D 旋轉、縮放、光照)中出現的視覺對象建模,以及使用強大的遷移學習技術擴展表征以實現 zero/one shot learning,是一道難題。特征提取和數據表征方法可以有效地減少機器學習模型所需的訓練樣本數量。
圖像定位中常使用一種兩步方法:位置識別+姿勢估計。前者使用詞袋方法,通過累積局部圖像描述子(如 SIFT)來計算每個圖像的全局描述子。每個全局描述子均被存儲在數據庫中,一同存儲的還有生成 3D 點云基準圖的攝像頭姿勢。從 query 圖像中提取出類似的全局描述子,數據庫中最接近的全局描述子可以通過高效搜索檢索出來。最接近全局描述子的攝像頭姿勢可以幫助我們對 query 圖像進行粗略定位。在姿勢估計中,使用 Perspective-n-Point (PnP) [13] 和幾何驗證等算法更準確地計算 query 圖像的確切姿勢。
基于圖像的位置識別的成功很大程度上歸功于提取圖像特征描述子的能力。不幸的是,在對激光雷達掃描圖像執(zhí)行局部特征提取時,沒有性能堪比 SIFT 的算法。3D 場景由 3D 點和數據庫圖像構成。一種方法是將每個 3D 點與一組 SIFT 描述子結合起來,描述子對應該點被三角化的圖像特征。然后將這些描述子平均為一個 SIFT 描述子,來描述該點的外觀。 另一種方法基于 RGB-D 數據構建多模態(tài)特征,而不是深度處理。至于深度處理部分,研究者采用基于表面法線的著色方法,因為它對多種任務有效且具備穩(wěn)健性。另一種使用傳統(tǒng) CV 技術的替代方法提出基于圖的層級描述子 Force Histogram Decomposition (FHD),它可以定義對象的成對結構化子部分之間的空間關系和形狀信息。該學習步驟的優(yōu)勢是與傳統(tǒng)詞袋框架兼容,從而出現結合了結構特征和局部特征的混合表征。
360 度攝像頭 由于球面攝像頭的成像特點,每張圖像都能夠捕捉到 360 度全景場景,消除了對轉向選擇的限制。球面圖像面臨的一個主要挑戰(zhàn)是超廣角魚眼鏡頭導致的嚴重桶形畸變,這增加了受傳統(tǒng)人類視覺啟發(fā)的車道檢測和軌跡追蹤等方法的實現復雜度。這通常需要額外的預處理步驟,如先驗校準(prior calibration)和 deworming。[60] 提出的一種替代方法將導航看作分類問題,從而繞過了預處理步驟,該方法基于原始未校準球面圖像找出最優(yōu)潛在路徑方向。 全景拼接是該領域的另一個開放性問題。實時拼接方法 [61] 使用一組可變形網格和最終圖像,并結合利用穩(wěn)健像素著色器的輸入。另一種方法 [62] 將幾何推理(線和消失點)提供的準確率和深度學習技術(邊和法線圖)實現的更高級數據提取和模式識別結合起來,為室內場景提取結構化數據,并生成布局假設。在稀疏結構化場景中,由于缺乏明顯的圖像特征,基于特征的圖像配準方法通常會失敗。這時可使用直接的圖像配準方法,如基于相位相關的圖像配準算法。[23] 研究了基于判別相關濾波器(DCF)的圖像配準技術,證明基于 DCF 的方法優(yōu)于基于相位相關的方法。
數據集標注和增強 對于 CV 和深度學習的結合存在一些反駁意見,總結為一句話就是:我們需要重新評估方法,不管是基于規(guī)則的方法還是數據驅動方法。從信號處理的傳統(tǒng)角度來看,我們了解傳統(tǒng) CV 算法(如 SIFT 和 SURF)的運算內涵,而深度學習無法展示這些意義,你所需要的只是更多數據。這可以被視為巨大的前進,但也有可能是后退。本論文提到了該爭論的正反方觀點,但是如果未來的方法僅基于數據驅動,那么研究重點應該放在更智能的數據集創(chuàng)建方法上。 當前研究的基礎問題是:對于特殊應用的高級算法或模型,沒有足夠的數據。未來,結合自定義數據集和深度學習模型將成為很多研究論文的主題。因此研究者的輸出不僅涉及算法或架構,還包括數據集或數據收集方法。數據集標注是深度學習工作流中的主要瓶頸,需要大量的手動標注工作。這在語義分割中尤為明顯,因為該領域需要準確標注每一個像素。[20] 討論了很多有用的半自動流程工具,其中一些利用了 ORB 特征、多邊形變形(polygon morphing)、半自動感興趣區(qū)域擬合等算法方法。 克服數據缺乏、減少圖像分類深度學習模型過擬合現象最容易也最常見的方法是,利用標簽不變的圖像變換(label-preserving transformation)人為地擴大數據集。該過程叫做數據集增強,指基于已有數據通過剪裁、縮放或旋轉等方式生成額外的訓練數據。人們希望數據增強步驟需要極少的計算,且可在深度學習訓練流程中實現,這樣變換后的圖像就不必存儲在磁盤中了。數據增強使用的傳統(tǒng)算法方法包括主成分分析(PCA)、噪聲添加、在特征空間的樣本之間進行內插或外推,以及基于分割標注建模視覺語境周邊物體。
-
數據
+關注
關注
8文章
7144瀏覽量
89581 -
攝像頭
+關注
關注
60文章
4862瀏覽量
96311 -
深度學習
+關注
關注
73文章
5515瀏覽量
121552
原文標題:深度學習崛起后,傳統(tǒng)計算機視覺技術落伍了嗎?
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
基于深度學習的傳統(tǒng)圖像增強算法
基于改進演化算法的空間數據聚類方法
基于增強學習算法的PID參數調整方法研究
一種基于LMS改進算法的語音增強方法
一種新的DSA圖像增強算法
一種單獨適配于NER的數據增強方法
如何使用FPGA實現實時圖像增強算法
幾種常用的NLP數據增強方法
基本圖像處理技術的數據增強方法介紹
UWB室內定位系統(tǒng)TDOA算法方案介紹
傳統(tǒng)機器學習方法和應用指導





 工商網監(jiān)
工商網監(jiān)
評論