 【科普】干貨!帶你從0了解移動機器人(三) ——自主導航系統及上位機軟件設計與實現
【科普】干貨!帶你從0了解移動機器人(三) ——自主導航系統及上位機軟件設計與實現
隨著機器人技術的不斷發展,我們可以在許多簡單重復,危險的崗位上看到機器人的身影,移動機器人憑借其在復雜環境下工作,具有自行感知、自行規劃、自我決策功能的能力,它可以在不同的環境中移動并執行任務,在人類社會中發揮著越來越重要的作用。但移動機器人擁有自主導航能力,才能進一步完成上訴所設定的任務。可以說自主導航能力是移動機器人最為基礎和核心的技術,而上位機軟件的實現與設計,則進一步推動機器人的完善發展。在前兩篇文章中,我們介紹了移動機器人的基本概念和硬件組成,本文繼續深入探討移動機器人的自主導航系統及上位機軟件設計與實現。
移動機器人的內載算法
為了實現移動機器人在未知環境的自主導航,就需要解決環境感知、地圖創建、自主定位、運動規劃等一系列核心問題,也就是移動機器人車載內算法的解決。移動機器人內部算法主要包括導航算法及運動控制算法。導航算法是指移動機器人在未知環境中通過傳感器數據獲取環境信息,規劃路徑并選擇最優路徑到達目的地的算法。運動控制算法是指移動機器人在到達目的地后,根據傳感器數據調整方向和速度的算法。這些算法需要在移動機器人的控制器上實現,并與傳感器、執行器等硬件進行交互。
在自主導航系統中,SLAM技術是通過激光雷達傳感器,獲取周圍環境的信息,實現即時定位與地圖構建的過程。相比于視覺傳感器,激光雷達傳感器不受環境光照的影響,對障礙物識別準確度與可靠性高。路徑規劃技術則是在SLAM建立完整地圖基礎上,按照某種評價指標尋找一條從起始點到目標點的最優無碰撞安全路徑。
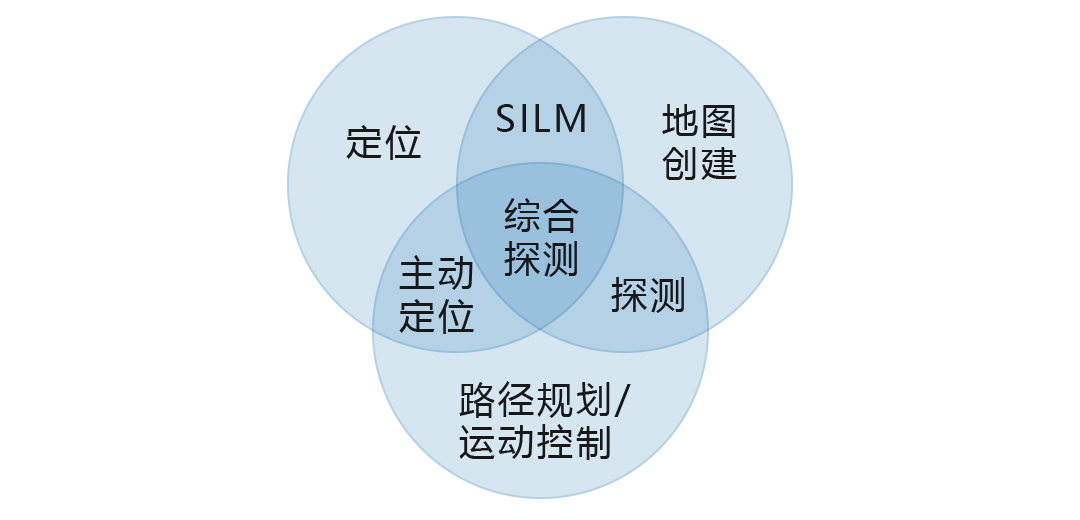 ▲SLIM與各領域關系圖
▲SLIM與各領域關系圖在運動控制算法方面,主要有閉環控制和開環控制兩種方式。
閉環控制是通過傳感器反饋來調整控制量,保證移動機器人按照規劃路徑順利地到達目標位置。而開環控制則是根據預先設定的控制量進行運動控制,不考慮機器人當前狀態的影響。開環控制相對簡單,但精度較低,常用于一些簡單的任務。
然而由于自主導航系統的定位、建圖與導航等一系列操作較復雜,且移動機器人地圖、數據信息和運行軌跡無法直觀化,為此需要設計上位機將定位、建圖與導航等功能集成到上位機操作界面,同時實時顯示移動機器人地圖、數據和運行軌跡。
移動機器人外部調度軟件和管理平臺
調度軟件和管理平臺是指在上位機(服務器)上實現的軟件,用于對移動機器人進行遠程管理和控制。
通過調度軟件,可以實現對移動機器人的任務指派、路徑規劃、遠程監控等功能。管理平臺則提供了對多臺移動機器人進行管理的功能,包括機器人的電量控制、狀態監測、報警處理等。
上位機軟件主要由2個主界面組成:主從機的登錄通信模塊以及移動機器人當前話題列表和運動信息顯示界面、可視化界面以及移動機器人啟動設置和控制模塊顯示界面。上位機利用全局規劃與局部規劃算法完成自主導航功能。上位機軟件所實現的
主要功能如下
:1)建立主從機之間的通信:將兩臺電腦連接在相同的局域網下,通過上位機分別獲取主從機的IP地址以及URL地址,再通過SSH協議讓從機登錄主機并且控制主機,從而完成登錄通信過程。2)獲取移動機器人當前話題列表及運動信息3)界面可視化及圖層信息獲取與發布位置信息4)啟動設置與實現移動機器人控制
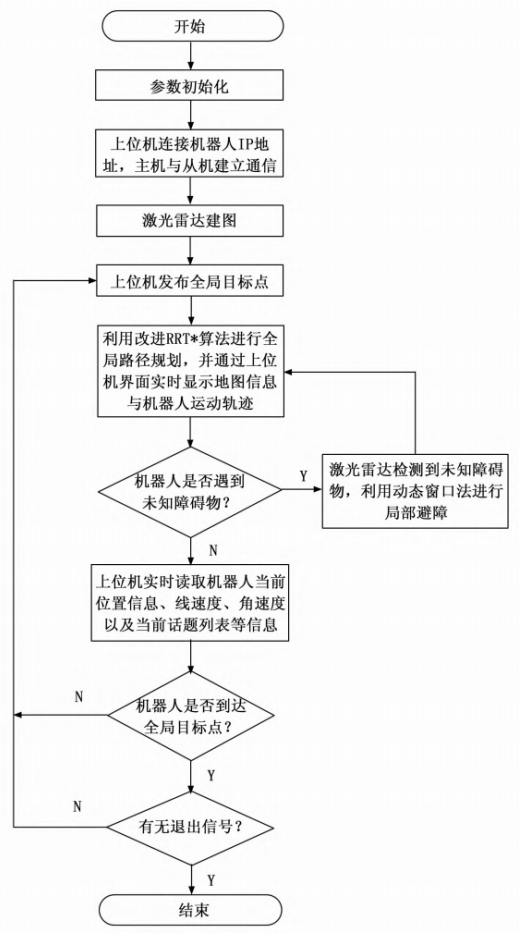 ▲上位機工作流程圖
▲上位機工作流程圖移動機器人的自主導航系統及上位機軟件設計與實現是移動機器人技術的重要組成部分,是實現機器人智能化的關鍵。
在現階段發展的移動機器人中,底層核心技術的發展確實是非常重要的,相信在未來,隨著機器人底盤技術的不斷成熟,我們將會再更多公共場所看到移動機器人靈活的身姿。這些技術的應用將為倉儲和物流等各行各業帶來更高效、更智能的服務,具有重要的應用價值。
-
機器人
+關注
關注
211文章
28640瀏覽量
208395 -
移動機器人
+關注
關注
2文章
765瀏覽量
33647 -
AGV小車
+關注
關注
4文章
173瀏覽量
11196 -
AGV系統
+關注
關注
0文章
12瀏覽量
5582 -
agv機器人
+關注
關注
1文章
65瀏覽量
6571
發布評論請先 登錄
相關推薦
無軌激光AGV移動機器人如何構建地圖?
移動機器人核心科技解碼:導航、感知與掌控力的深度剖析
自主移動機器人設計指南

思嵐科技榮獲雙年度移動機器人優質供應鏈獎
移動機器人的技術突破和未來展望

智能移動機器人系統方案指南

傳感器融合如何賦能自主移動機器人


如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?

智能移動機器人系統的用途和市場趨勢
機器人高效導航定位背后SLAM專用芯片的崛起
海康機器人第100000臺移動機器人下線
自主移動機器人的發展路徑與前沿解決方案探究

機械臂和移動機器人兩種控制系統方案對比







 工商網監
工商網監
評論