") 【知識(shí)】從硬件架構(gòu)、軟件結(jié)構(gòu)兩方面認(rèn)識(shí)BMS
【知識(shí)】從硬件架構(gòu)、軟件結(jié)構(gòu)兩方面認(rèn)識(shí)BMS
BMS電池系統(tǒng)俗稱之為電池保姆或電池管家,主要就是為了智能化管理及維護(hù)各個(gè)電池單元,防止電池出現(xiàn)過(guò)充電和過(guò)放電,延長(zhǎng)電池的使用壽命,監(jiān)控電池的狀態(tài)。BMS電池管理系統(tǒng)單元包括BMS電池管理系統(tǒng)、控制模組、顯示模組、無(wú)線通信模組、電氣設(shè)備、用于為電氣設(shè)備供電的電池組以及用于采集電池組的電池信息的采集模組,
BMS的硬件架構(gòu):
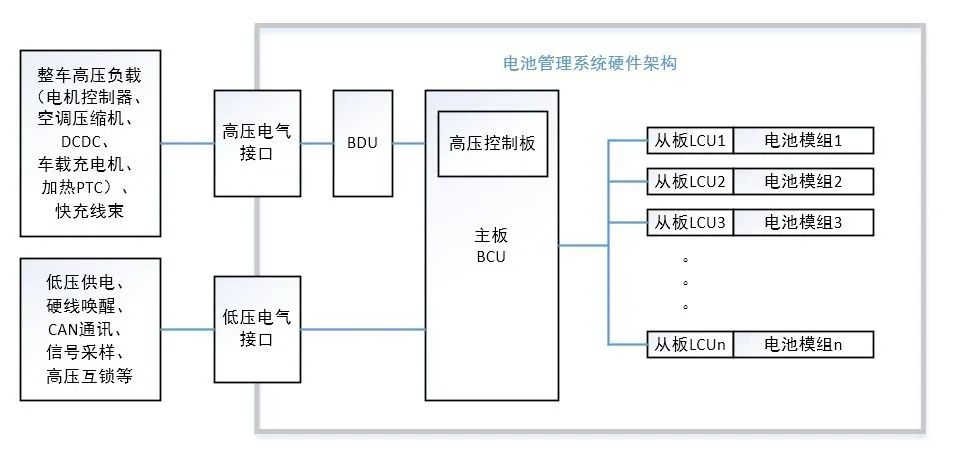
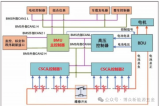
(電池管理系統(tǒng)硬件架構(gòu),圖1,圖來(lái)于網(wǎng)絡(luò))
主板,作為BMS的大腦,會(huì)收集來(lái)自各個(gè)從板(通常叫LCU)的采樣信息,通過(guò)低壓電氣接口與整車進(jìn)行通訊,控制BDU(高壓分?jǐn)嗪校﹥?nèi)的繼電器動(dòng)作,實(shí)施監(jiān)控電池的各項(xiàng)狀態(tài),保證電池在充放電過(guò)程中的安全使用;
從板(LCU),作為BMS的哨兵,實(shí)施監(jiān)控著模組的單體電壓、單體溫度等信息,將信息傳輸給主板,具備電池均衡功能,從板與主板的通訊方式通常是CAN通訊或者菊花鏈通訊;
BDU,是電池包電能進(jìn)出的大門,通過(guò)高壓電氣接口與整車高壓負(fù)載和快充線束連接,包含預(yù)充電路、總正繼電器、總負(fù)繼電器、快充繼電器等,受主板控制;
高壓控制板,電池包電能進(jìn)出的大門門衛(wèi),可集成在主板(如圖1),也可獨(dú)立出來(lái),實(shí)時(shí)監(jiān)控著電池包的電壓電流,同時(shí)還包含預(yù)充檢測(cè)和絕緣檢測(cè)功能。
電池管理系統(tǒng)(BMS)的軟件架構(gòu)
面對(duì)汽車逐步的電動(dòng)化、智能化、網(wǎng)聯(lián)化,汽車電子的軟件開(kāi)發(fā)也越來(lái)越復(fù)雜,所以AUTOSAR聯(lián)盟也就應(yīng)運(yùn)而生了。
AUTOSAR即是Automotive Open System Architecture(汽車開(kāi)發(fā)系統(tǒng)架構(gòu)),AUTOSAR的分層模型架構(gòu)使得主機(jī)廠、供應(yīng)商、科研機(jī)構(gòu)可以聯(lián)合開(kāi)發(fā)、高效配合,構(gòu)造出強(qiáng)大的軟件系統(tǒng)。
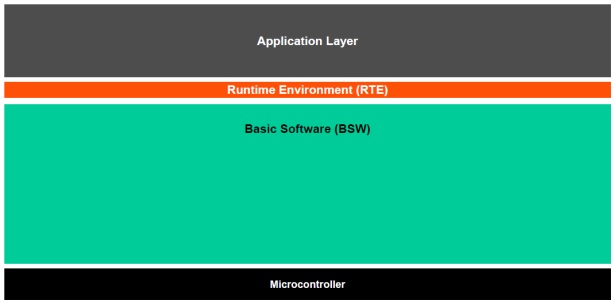
(圖2)
成熟的BMS軟件開(kāi)發(fā)通常是基于AUTOSAR架構(gòu)開(kāi)發(fā)。AUTOSAR架構(gòu)將運(yùn)行在Microcontroller之上的ECU軟件分為:Application、RTE、BSW三層,如圖2,接下來(lái)簡(jiǎn)單介紹下AUTOSAR各分層的分工情況:
Application應(yīng)用層,將軟件都劃分為一個(gè)ASWC(Atomic Software component),包括硬件無(wú)關(guān)的Application Software component、Sensor Software component、Actuator Software component等
。對(duì)于電池管理系統(tǒng),其功能絕大部分算法邏輯都是在應(yīng)用層進(jìn)行,也是BMS軟件開(kāi)發(fā)的核心工作。
RTE運(yùn)行環(huán)境,提供基礎(chǔ)的通訊服務(wù),支持Software Component之間和Software Component到BSW的通訊(包含ECU內(nèi)部的程序調(diào)用、ECU外部的總線通訊等情況),RTE使得應(yīng)用層的軟件架構(gòu)完全脫離于具體的單個(gè)ECU和BSW。
BSW基礎(chǔ)軟件層,如圖3所示可細(xì)分為:Services Layer、ECU Abstraction Layer、Microcontroller AbstractionLayer和Complex Drivers Layer。
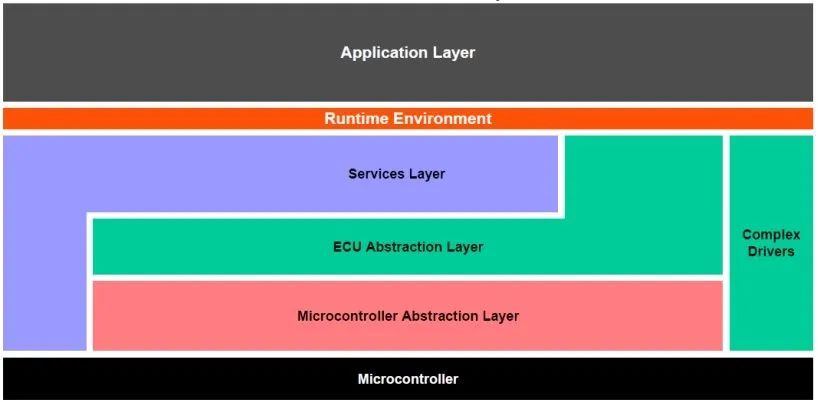
(圖3)
每層的BSW都保護(hù)不同的功能模塊,介紹如下:
Service Layer,服務(wù)層,位于BSW最上層,將各種基礎(chǔ)軟件功能以服務(wù)的形式封轉(zhuǎn)起來(lái),供應(yīng)用層調(diào)用,包括RTOS、通訊與網(wǎng)絡(luò)管理、內(nèi)存管理、診斷服務(wù)、狀態(tài)管理、程序監(jiān)控等服務(wù)。
ECU Abstraction Layer,電控單元抽象層,封轉(zhuǎn)了微控制器層以及外圍驅(qū)動(dòng)設(shè)備的驅(qū)動(dòng),將微控制器內(nèi)外設(shè)的訪問(wèn)進(jìn)行統(tǒng)一,使上層軟件應(yīng)用與ECU硬件相剝離。
Microcontroller Abstraction Layer,微控制器抽象層,位于BSW的最底層,包含訪問(wèn)微控制器的驅(qū)動(dòng),使上層軟件與微控制器相分離,便于應(yīng)用的移植。
Complex Drivers Layer,復(fù)雜驅(qū)動(dòng)層,為了滿足實(shí)時(shí)性等要求,可以利用復(fù)雜驅(qū)動(dòng)讓應(yīng)用層通過(guò)RTE直接訪問(wèn)硬件,也可以利用復(fù)雜驅(qū)動(dòng)封轉(zhuǎn)已有的非分層的軟件,以實(shí)現(xiàn)項(xiàng)AUTOSAR軟件架構(gòu)逐步實(shí)施。
電池管理系統(tǒng)的功能:
電池管理系統(tǒng)的功能可分為測(cè)量功能、核心算法和應(yīng)用功能,如圖4。
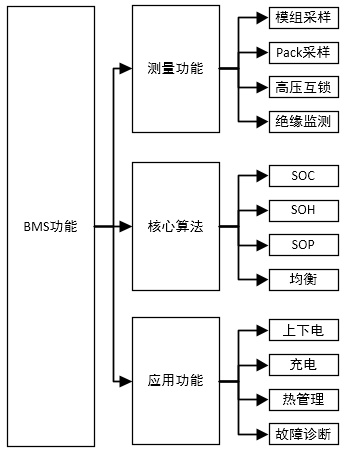
(圖4)
BMS中大致包含三個(gè)大的功能模塊。
第一,測(cè)量功能主要包含:
模組的電壓采樣和溫度采樣、Pack的總電壓采樣和總電流采樣、高壓互鎖檢測(cè)、絕緣檢測(cè)。測(cè)量功能實(shí)時(shí)監(jiān)控著電池的基本狀態(tài),是BMS所有功能的基礎(chǔ),離開(kāi)了這些測(cè)量,BMS所有核心算法、應(yīng)用功能都難以執(zhí)行。
第二,核心算法主要包含:
SOC(電池荷電狀態(tài))算法、SOH(壽命狀態(tài))算法、SOP(功率狀態(tài))算法、電池均衡算法。喜歡挑戰(zhàn)算法的朋友可以挑戰(zhàn)。
其中,SOC算法,行業(yè)內(nèi)典型的方案有安時(shí)積分、開(kāi)路電壓、人工神經(jīng)網(wǎng)絡(luò)、卡爾曼濾波,單單某一種方案都會(huì)存在缺點(diǎn),目前主流的方案是使用安時(shí)積分加上卡爾曼濾波的方式。
SOH算法,目前常用的算法有庫(kù)侖計(jì)算法加上開(kāi)路電壓,還有卡爾曼濾波等等算法。
SOP算法,目前可靠的方法還是靠試驗(yàn)數(shù)據(jù),用查表法實(shí)現(xiàn)。
均衡功能的原理,可以聯(lián)想木桶原理,有主動(dòng)均衡和被動(dòng)均衡兩種方法。主動(dòng)均衡就是長(zhǎng)木板裁剪后來(lái)補(bǔ)短木板,使得所有木板平均;被動(dòng)均衡就是長(zhǎng)木板都進(jìn)行裁剪,保持所有長(zhǎng)木板與最短木板一樣長(zhǎng)。
第三,應(yīng)用功能主要包含:
高壓上下電與低壓上下電、交流充電與直流充電、電池系統(tǒng)熱管理、電池系統(tǒng)故障診斷。
其中,高壓上下電與低壓上下電是需要其他控制器,比如VCU與BMS配合來(lái)實(shí)現(xiàn),BMS完成高壓上電后,才能給整車高壓負(fù)載供電或進(jìn)行充電(也有廠家做的集成度高的,BMS自己就能搞定上下電的過(guò)程)。
交流充電是通過(guò)交流充電樁、車載充電機(jī)為動(dòng)力電池充電;直流充電是通過(guò)直流充電樁為動(dòng)力電池充電。充電功能有相關(guān)的國(guó)標(biāo)規(guī)定。
電池?zé)峁芾碇饕潜WC電池處在一個(gè)合理的溫度范圍,保證充放電功能處于最佳狀態(tài)。
故障診斷這塊,內(nèi)容較多,電池的安全就全靠這塊,包含過(guò)欠壓保護(hù)、過(guò)流保護(hù)、繼電器粘黏檢測(cè)、電池壓差保護(hù)等等功能。
(文章來(lái)源知乎-小鵬汽車)
-
bms
+關(guān)注
關(guān)注
107文章
1017瀏覽量
66378 -
電池
+關(guān)注
關(guān)注
84文章
10675瀏覽量
131302
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
硬件工程師需要掌握的硬件基礎(chǔ)知識(shí)

BMS的功能、架構(gòu)及其在電動(dòng)汽車中的應(yīng)用
【「嵌入式Hypervisor:架構(gòu)、原理與應(yīng)用」閱讀體驗(yàn)】+第一二章讀后感
PNP傳感器的功能和結(jié)構(gòu)
常見(jiàn)的電動(dòng)兩輪車BMS架構(gòu)應(yīng)用說(shuō)明

實(shí)例分享!BMS采樣板針對(duì)低頻磁場(chǎng)抗擾測(cè)試解決方案
儲(chǔ)能bms和動(dòng)力bms哪個(gè)好
鋰電池bms故障解決方法
軟件架構(gòu)搞好了,還用擔(dān)心代碼可讀性差?

嵌入式硬件VS軟件,到底哪個(gè)更難?
嵌入式系統(tǒng)軟硬件基礎(chǔ)知識(shí)大全
帶你認(rèn)識(shí)什么是BMS(電池管理系統(tǒng))干貨






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論