") 用SPAD512S在3D成像中的應(yīng)用
用SPAD512S在3D成像中的應(yīng)用
在從空間成像到生物醫(yī)學(xué)顯微鏡、安全、工業(yè)檢查和文化遺產(chǎn)等眾多領(lǐng)域,對快速、高分辨率和低噪聲3D成像的要求非常高。在這種情況下,傳統(tǒng)的全光成像代表了3D成像領(lǐng)域最有前景的技術(shù)之一,因為其超高的時間分辨率:3D成像是在30M像素分辨率下每秒7幀的單次拍攝中實現(xiàn)的,對于1M像素分辨率為每秒180幀;無多個傳感器,近場需要耗時的掃描或干涉技術(shù)。然而常規(guī)全光成像導(dǎo)致分辨率損失,這通常是不可接受的。
我們打破這種限制的策略包括將一個全新的和基礎(chǔ)性的采用上一代硬件和軟件解決方案。基本思想是通過使用新型傳感器來利用存儲在光的相關(guān)性中的信息實現(xiàn)一項非常雄心勃勃的任務(wù)的測量協(xié)議:高速(10–100 fps)量子全光成像(QPI)具有超低噪聲和前所未有的性能分辨率和景深的組合。所開發(fā)的成像技術(shù)旨在:在成為第一個實際可用和適當?shù)摹傲孔印背上窦夹g(shù)超出了經(jīng)典成像模式的固有限制。
除了基礎(chǔ)感興趣的是,該技術(shù)的量子特性允許在3D上提取信息來自極低光子通量下的光相關(guān)性的圖像,從而減少場景暴露于光照。對QPI的興趣是由潛在的相對于其他已建立的3D成像技術(shù)的優(yōu)點。實際上,其他與QPI不同,方法需要精細的干涉測量,如數(shù)字測量全息顯微鏡或相位恢復(fù)算法,如傅里葉全息圖或快速脈沖照明,如飛行時間(TOF)成像。此外,QPI提供了無掃描顯微鏡模式的基礎(chǔ),克服了共聚焦方法。
量子全光相機有望提供全光成像的優(yōu)勢,主要是超快和免掃描的 3D 成像和重聚焦能 力,其性能是經(jīng)典相機無法企及的。最先進的全光成像設(shè)備能夠在單次拍攝中獲取多視角圖像.它們的工作原理是基于對給定場景中光的空間分布和傳播方向的同時測量。獲取的方向信息轉(zhuǎn)化為快速 3D 成像所需的重聚焦能力、可增加的景深(DOF)和多視角 2D 圖像的并行獲取。
在最先進的全光照相機中,方向檢測是通過在標準數(shù)碼相機的主鏡頭和傳感器之間插 入微透鏡陣列來實現(xiàn)的。傳感器獲取復(fù)合信息,該復(fù)合信息允許識別檢測到的光來自 的物點和透鏡點。然而,由于結(jié)構(gòu)(使用微透鏡陣列)和基本(高斯極限)原因,圖像分辨率與獲 得的方向信息成反比地降低;因此,在基于簡單強度測量的設(shè)備中,在衍射極限下的全光成像 被認為是無法實現(xiàn)的。
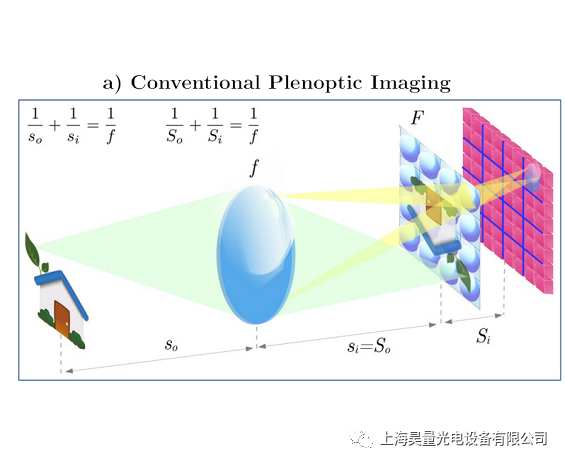
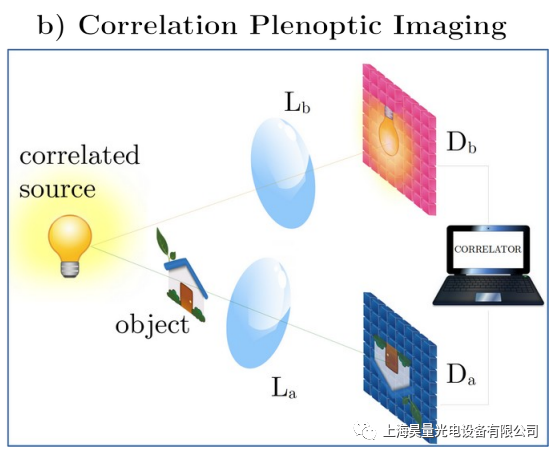
圖(a)傳統(tǒng)全光成像(PI)設(shè)備的方案:物體的圖像聚焦在微透鏡陣列上,而每個微透鏡將主透鏡 的圖像聚焦在后面的像素上。這種配置需要與方向分辨率的增益成比例的空間分辨率的損失;(b)顯示了相關(guān)全光成像(CPI)設(shè)置的方案,其中方向信息是通過將物體聚焦的傳感器檢索到的信號與收集 光源圖像的傳感器相關(guān)聯(lián)而獲得的。
為了實現(xiàn)全光成像,我們正在尋求一個超高性能的探測器,一個相關(guān)部分是通過用基于尖端技術(shù)的傳感器(如單光子雪崩 二極管(SPAD)陣列)取代商用高分辨率傳感器(如科學(xué) CMOS 和 EMCCD 相機)來確定的。SPAD 基本上是一個光電二極管,其反向偏置電壓高于其擊穿電壓,因此撞擊其光敏區(qū)域的單個 光子可以產(chǎn)生電子-空穴對,從而觸發(fā)次級載流子的雪崩,并在非常短的時間尺度(皮秒) 內(nèi)產(chǎn)生大電流。這種操作方式被稱為蓋革模式。
SPAD輸出電壓由電子電路感測并直接轉(zhuǎn)換成數(shù)字信號,進一步處理以存儲光子到達和/或光子到達時間的二進制信息。從本質(zhì)上來說,SPAD 可以被看作是一個具有精密時間精度的光子-數(shù)字轉(zhuǎn)換裝置。SPADs 也可以選通,以便只在短至幾納秒的時間窗口內(nèi)敏感。如今,單個 SPAD 可以用作大型陣列的構(gòu)建模塊,每個像素電路都包含 SPAD 和即時光子處理邏輯和互連。
有幾種 CMOS 工藝可供選擇,可以定制關(guān)鍵 SPAD 性能指標和整體傳感器或成像器架構(gòu).靈敏度和填充因子有一段時間落后于科學(xué) CMOS 或 EMCCD,但近年來已大幅趕上。
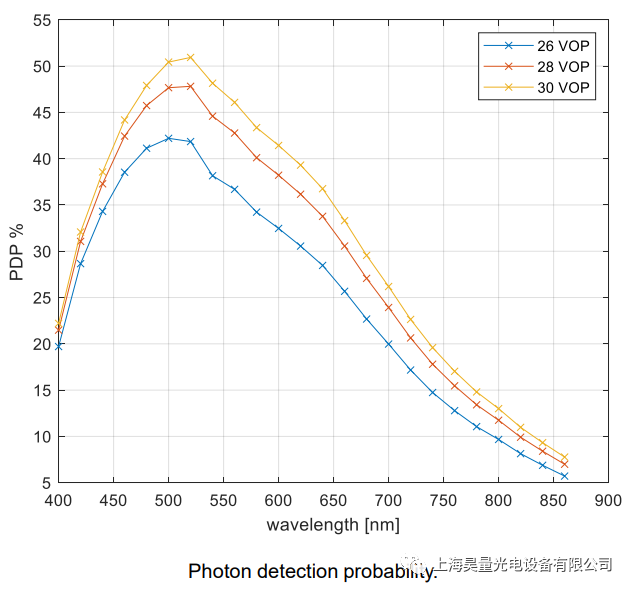
根據(jù) QPI 的要求,我們選擇使用由 EPFL AQUA laboratory group 開發(fā)的 SwisSPAD2 陣列,其特點是 512×512 像素分辨率,這是迄今為止最廣泛、最先進的 SPAD 陣列之一。傳感器內(nèi)部由 256×512 像素的兩半組成,以減少信號線上的負載和偏斜,實現(xiàn)更快的操作。這是一個純粹的二進制門控成像器,即每個像素為每幀記錄 0(無光子)或 1(一個或多個光子),讀出噪聲基本為零。傳感器由 FPGA 控制,F(xiàn)PGA 產(chǎn)生門控電路和讀出 序列的控制信號,并收集像素檢測結(jié)果。在 FPGA 中,在發(fā)送到計算機/GPU 進行分析和存儲之前,可以進一步處理得到的一位圖像,例如,累積成多位圖像。對于準直光,通過微透鏡陣列,最大幀速率為 97.7 kfps,10.5%的自然填充因子可以提高 4-5 倍 (優(yōu)化后的 模擬預(yù)計會有更高的值);在 520 納米(700 納米)和 6.5 伏過量偏壓下,光子探測概率為 50% (25%)。該器件還具有低噪聲(室溫下每像素平均暗計數(shù)率通常低于 100 cps,中值約低 10 倍)和先進的納秒門控電路。
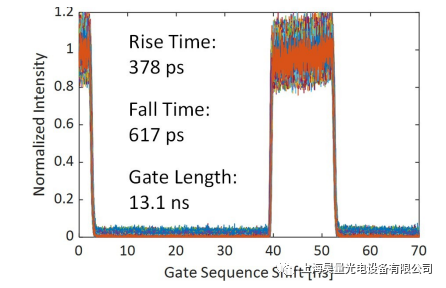
SwissSPAD2 門窗口輪廓。圖中標注了轉(zhuǎn)換時間和柵極寬度。柵極寬度可由用戶編程,內(nèi)部激光觸發(fā)模式下的最小柵極寬度為 10.8 ns。
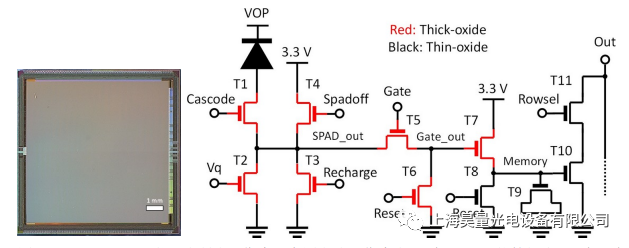
SwissSPAD2 顯微照片(左)和像素示意圖(右)。像素由 11 個 NMOS 晶體管組成,7 個具有厚氧化 物,4 個具有薄氧化物柵極。像素在其存儲電容器中存儲二進制光子計數(shù)。像素內(nèi)門定義了相對于 20 MHz 外部觸發(fā)信號的時間窗口,其中像素對光子敏感。
全光相機是一種全新的 3D 成像設(shè)備,利用動量-位置糾纏和光子數(shù)相關(guān)性來提供全光設(shè)備典型的重新聚焦和超快速、免掃描的 3D 成像能力,以及標準全光相機無法實現(xiàn)的顯著增強的性能:衍射極限分辨率、大焦深和超低噪聲;然而,為了使所提出的器件的量子優(yōu)勢有效并吸引最終用戶,需要解決兩個主要挑戰(zhàn)。
首先,由于相關(guān)測量需要大量的幀 來提供可接受的信噪比,如果用商業(yè)上可獲得的高分辨率相機來實現(xiàn),量子全光成像(QPI)將需要幾十秒到幾分鐘的采集時間。第二,為了檢索 3D 圖像或重新聚焦 2D 圖像,對這大量數(shù)據(jù)的加工需要高性能和耗時的計算。為了應(yīng)對這些挑戰(zhàn),我們正在開發(fā)高分辨率單光子雪崩光電二極管(SPAD)陣列和超快速電子設(shè)備的高性能低級編程,結(jié)合壓縮傳感和量子層析成像算法,旨在將采集和加工時間減少兩個數(shù)量級。還將討論開發(fā) QPI 設(shè)備的途徑。
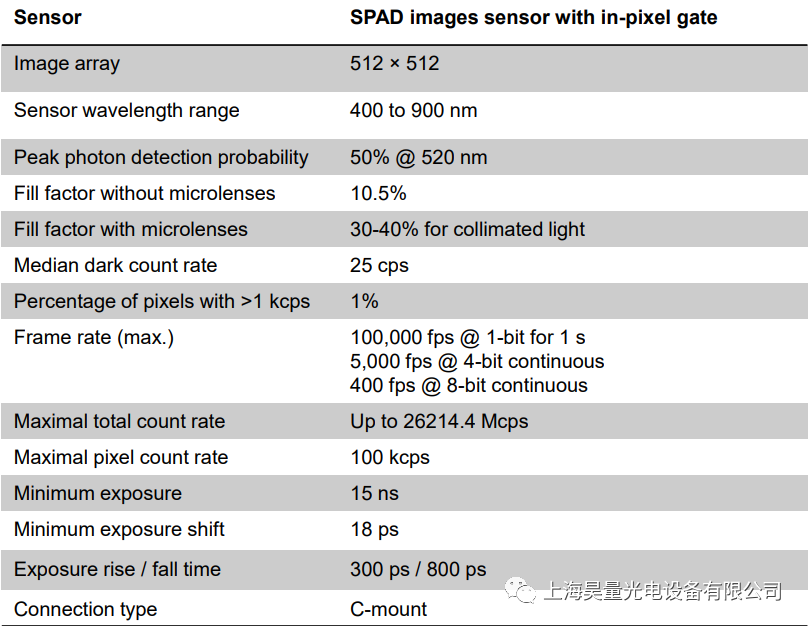
如下為昊量光電SPAD512S相機參數(shù),看后你將對全光成像有新的了解及認識。

-
傳感器
+關(guān)注
關(guān)注
2553文章
51407瀏覽量
756658 -
3D成像
+關(guān)注
關(guān)注
0文章
98瀏覽量
16153
發(fā)布評論請先 登錄
相關(guān)推薦
3D打印在制造業(yè)中的應(yīng)用
FPC與3D打印技術(shù)的結(jié)合 FPC在汽車電子中的應(yīng)用前景
UV光固化技術(shù)在3D打印中的應(yīng)用
傅里葉光場顯微成像技術(shù)—2D顯微鏡實現(xiàn)3D成像

利用微型SPAD系統(tǒng)實現(xiàn)熒光壽命成像+ToF測距

領(lǐng)麥微紅外測溫傳感器在小型光敏3D打印機中的創(chuàng)新應(yīng)用

物聯(lián)網(wǎng)行業(yè)中的模具定制方案_3D打印材料選型分享
安泰功率放大器在微納光固化3D打印中的具體應(yīng)用
3D霍爾效應(yīng)傳感器在機器人設(shè)計中的機械優(yōu)勢

裸眼3D筆記本電腦——先進的光場裸眼3D技術(shù)
奧比中光3D相機打造高質(zhì)量、低成本的3D動作捕捉與3D動畫內(nèi)容生成方案
工業(yè)鏡頭在3D結(jié)構(gòu)光檢測中實際應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論