 【深度解析】ZMC300E EtherCAT主站控制器實現復雜的運動軌跡規劃原理及應用
【深度解析】ZMC300E EtherCAT主站控制器實現復雜的運動軌跡規劃原理及應用
許多任務要求控制器實現貝塞爾等復雜曲線的軌跡插補,并通過倒圓角算法平滑軌跡中的拐角。本文將重點介紹一般曲線軌跡的插補算法,并基于ZMC300E EtherCAT主站控制器,實現對文字輪廓的繪制。
 ?ZMC300E介紹
?ZMC300E介紹
ZMC300E是廣州致遠電子股份有限公司開發的最新一代智能總線型 EtherCAT 主站控制器,是面向工廠智能化時代的機器控制器。其采用工業領域內先進的嵌入式 ARM 方案,集實時操作系統、智能算法于一身,以 EtherCAT 工業以太網協議為向導,可以快速、有效、便捷的構建數控智能化設備,以適應工廠智能化、信息化產業的變革。ZMC300E采用工業領域內先進的嵌入式 ARM 方案,使用TI的Cortex-A8內核的AM335X應用處理器為核心,配合Xenomai高實時性Linux系統,精心設計了一路EtherCAT口作為主站使用,其通訊可實現ms周期任務抖動±15us以內,可滿足運動控制器的高實時性要求。為了滿足不同的自動化應用需求,ZMC300E還提供了多種豐富的硬件接口,包含1路CAN、1路485、2路以太網、32個用戶I/O等等。

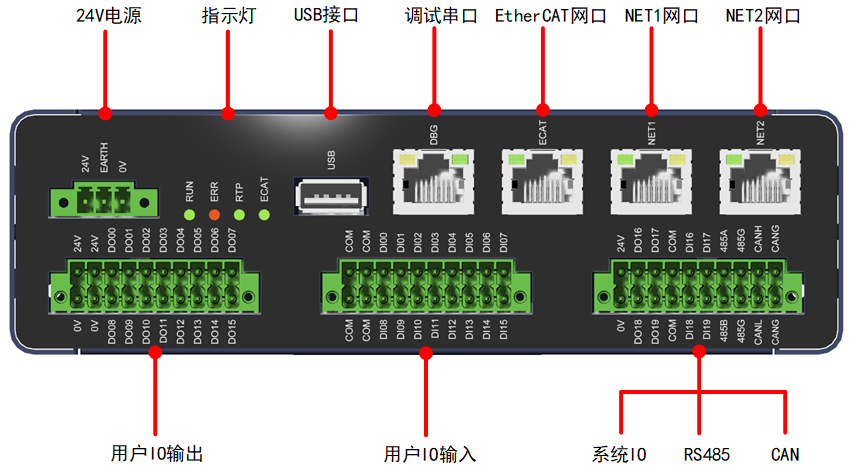
圖1 ZMC300E接口示意圖
ZMC300E EtherCAT主站控制器是為設備制造商提供多軸數、多IO點數控制的新一代可靠智能的運動控制解決方案,可以廣泛應用于注塑行業、沖壓行業、車床行業、搬運碼垛、關節機器人、噴涂、玻璃機、壓鑄機、包裝設備、3C設備、鋰電池設備、紡織、流水線工作站、非標自動化裝備、特種機床等高端設備應用。 ?插補算法插補算法根據給定的信息進行數字計算,不斷計算出參與運動的各坐標軸的進給指令,然后分別驅動各自相應的執行部件產生協調運動,以使被控機械部件按理想的路線與速度移動。插補最常見的兩種方式是直線插補和圓弧插補。插補運動至少需要兩個軸參與,進行插補運動時,首先需要建立坐標系,將規劃軸映射到相應的坐標系中,運動控制器根據坐標映射關系,控制各軸運動,實現要求的運動軌跡。
目前,ZMC300E支持下面列出的軌跡插補算法:包括直線、平面圓弧、空間圓弧、螺旋線、漸開線、橢圓弧和貝塞爾曲線等。
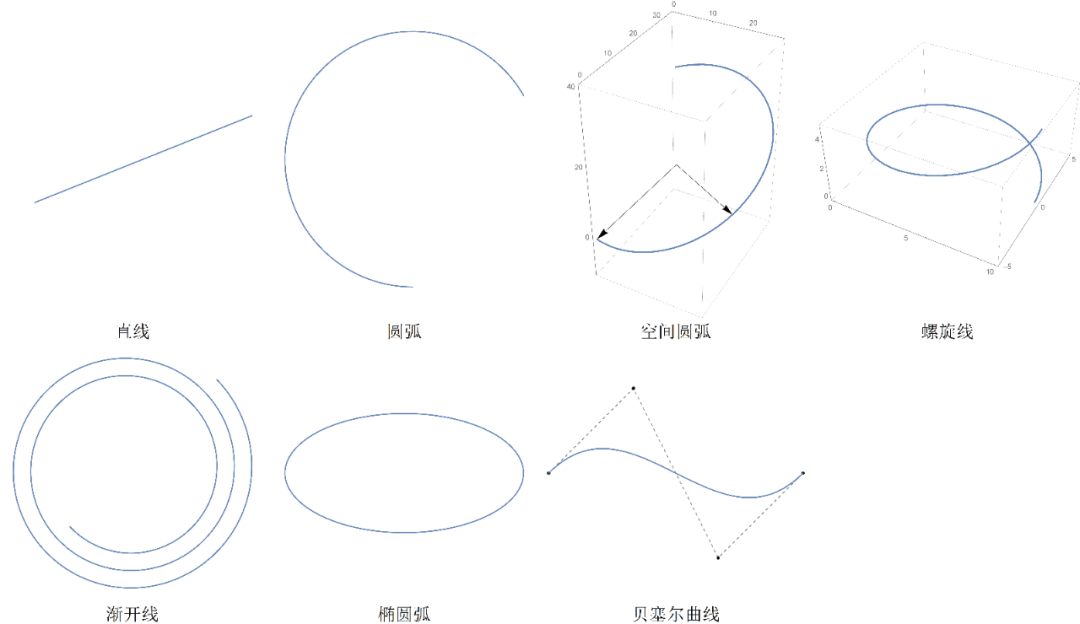 圖2 軌跡插補算法示意圖線運動的插補運動:由起始點處沿 X 方向走一小段(給一個脈沖當量軸走一段固定距離),發現終點在實際輪廓的下方,則下一條線段沿 Y 方向走一小段,此時如果線段終點還在實際輪廓下方,則繼續沿 Y 方向走一小段,直到在實際輪廓上方以后,再向 X 方向走一小段,依次循環類推,直到到達輪廓終點為止。
圖2 軌跡插補算法示意圖線運動的插補運動:由起始點處沿 X 方向走一小段(給一個脈沖當量軸走一段固定距離),發現終點在實際輪廓的下方,則下一條線段沿 Y 方向走一小段,此時如果線段終點還在實際輪廓下方,則繼續沿 Y 方向走一小段,直到在實際輪廓上方以后,再向 X 方向走一小段,依次循環類推,直到到達輪廓終點為止。
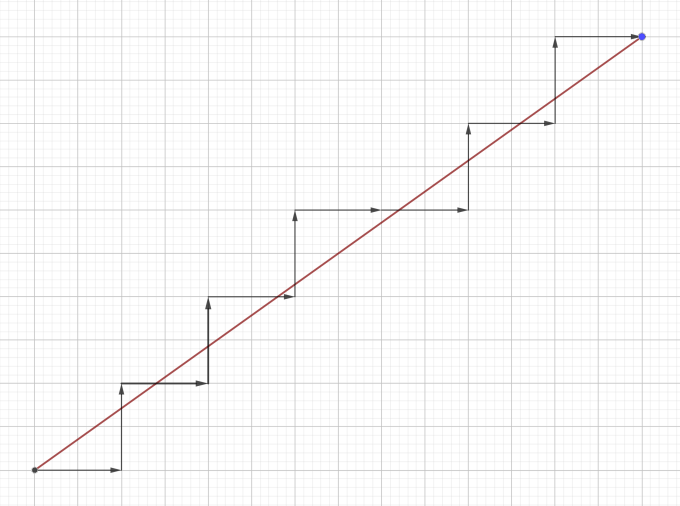
圖3 直線插補示意圖
弧插補與此類似,也是通過沿兩個方向運動最終到達輪廓終點,其示意圖如下。
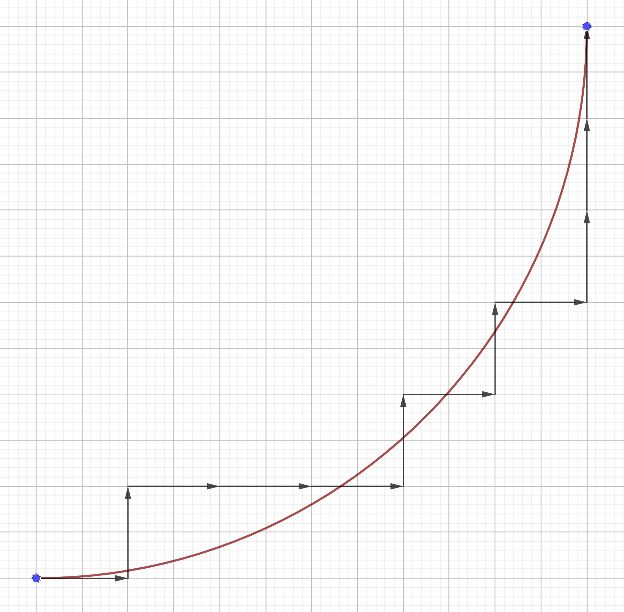
圖4圓弧插補示意圖
而對于橢圓弧來說,我們需要根據每一個時間段移動的距離得出完成該位移時新的坐標,也就是用直線代替了這段位移,隨后使用直線插補的方法,最終實現對一般曲線的插補,可見下面的橢圓弧示意圖。其中紅點對橢圓弧的總位移進行了等分,相鄰兩個紅點間橢圓弧的位移相等。而分段越多,相應直線段對橢圓弧的逼近就越好,此時在等分后的軌跡上完成插補即可。
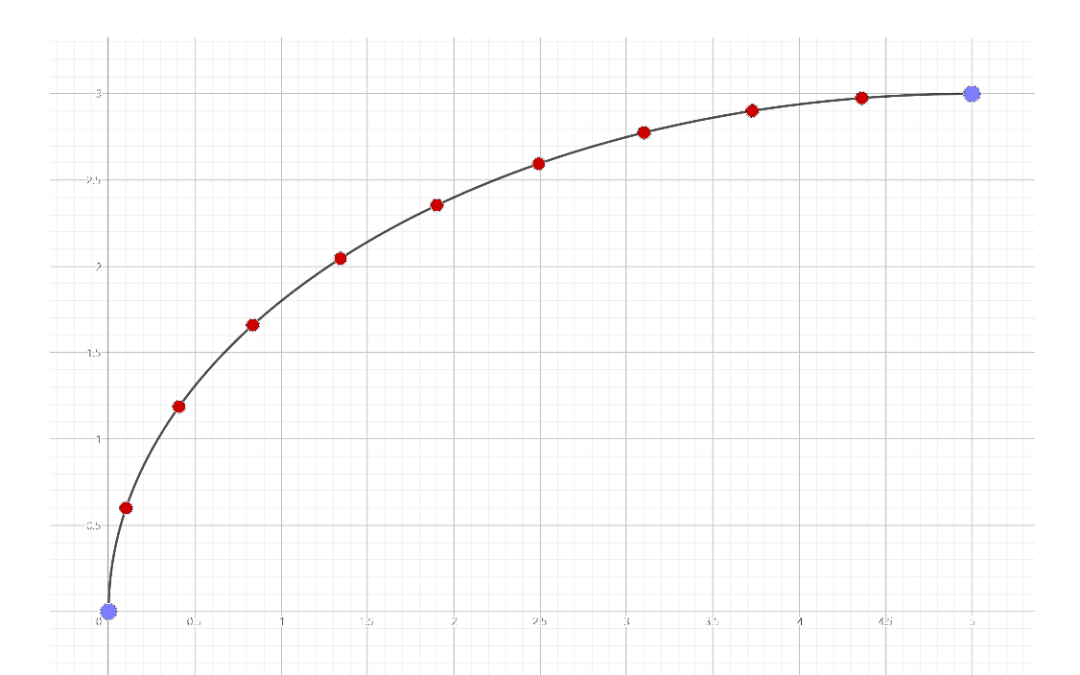
圖5橢圓弧分段示意圖
另外,對于貝塞爾曲線等一般曲線來說,需要依據一段時間內的位移得出其對應的坐標,隨后采用插補進而實現整個曲線軌跡的跟蹤。
 軌跡前瞻運動控制器的軌跡前瞻功能可以根據用戶的運動路徑自動計算出平滑的速度規劃,以防止軌跡的拐角處速度過快。軌跡前瞻包括三種模式:拐角減速、倒角、小圓限速,而這三種模式也可混合使用。拐角減速會根據夾角大小確定拐角處的最大速度,倒角則會設置前后兩個軌跡在拐角處的倒角,而小圓限速則會對半徑小于設置值的圓弧軌跡進行限速。
軌跡前瞻運動控制器的軌跡前瞻功能可以根據用戶的運動路徑自動計算出平滑的速度規劃,以防止軌跡的拐角處速度過快。軌跡前瞻包括三種模式:拐角減速、倒角、小圓限速,而這三種模式也可混合使用。拐角減速會根據夾角大小確定拐角處的最大速度,倒角則會設置前后兩個軌跡在拐角處的倒角,而小圓限速則會對半徑小于設置值的圓弧軌跡進行限速。
這里給出一個矩形以倒角圓作為前瞻的示例。一個普通的矩形軌跡如下圖。
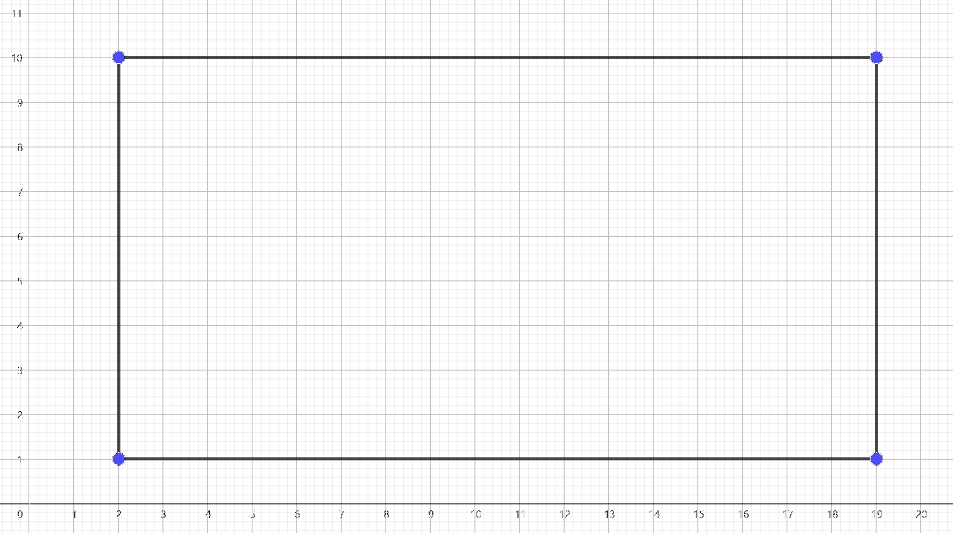
圖6矩形軌跡示意圖
該矩形含有四段軌跡。
若開啟倒角圓作為前瞻,則矩形軌跡則會變為圓角矩形,共含有其八段軌跡,包含四段直線和四段圓弧。
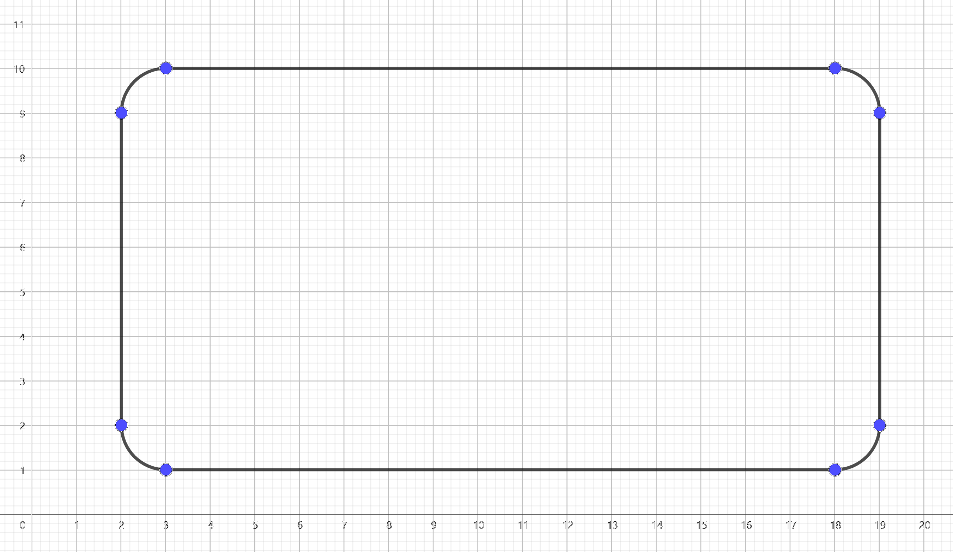
圖7開啟運動前瞻圓角矩形示意圖
開啟運動前瞻中的倒圓角。可以看到,在拐角處原來的直角彎改變為圓弧,整個運動軌跡上不再出現直接的拐角,這樣能夠消除軌跡改變時對機械的沖擊。
繪圖這里我們使用上面介紹的軌跡算法,繪制出復雜圖形。首先我們由一段確定了字體的文字,并根據其筆畫生成相應的輪廓:包括直線和貝塞爾曲線,這里選擇的文字是“專業專注,只做第一”。
對于輸入的文字,我們可以根據其對應的字體將它的筆畫分解為曲線或直線,其中曲線可以用貝塞爾曲線表示,這樣就可以得到對應繪圖軌跡。
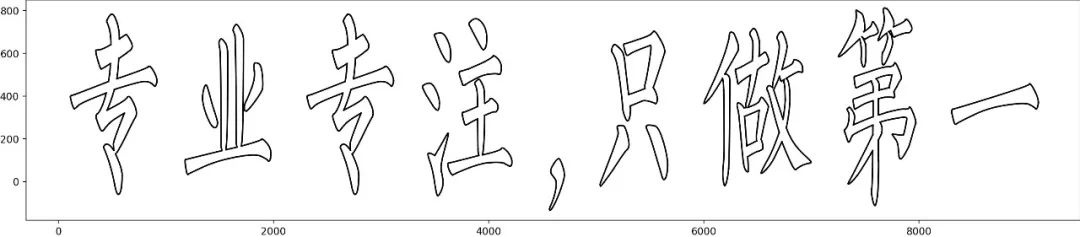
圖8由文字生成軌跡圖像
下圖是漢字“專”的底部輪廓,可以看到由貝塞爾曲線表示的輪廓具有良好的光滑性。
圖9局部筆畫
可以看到圖片包含眾多不連續的筆畫,那么,對于前后兩個不連續的筆畫來說需要提筆和進筆,對應z軸上下的運動。加入筆畫的連接,可以得到以下的筆畫繪圖。 圖10?筆畫繪畫示意圖
圖10?筆畫繪畫示意圖
-
控制器
+關注
關注
112文章
16448瀏覽量
179462 -
機器
+關注
關注
0文章
784瀏覽量
40821
發布評論請先 登錄
相關推薦
ZMC600E運動控制器直線和圓弧插補算法詳解

ZMC600E運動控制器T型、S型速度規劃詳解
脈沖全閉環EtherCAT運動控制器的固件升級


基于全志T507-H的Igh EtherCAT主站案例分享

多軸高性能EtherCAT總線運動控制器ZMC408CE硬件介紹

EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集

電機控制領域如何實現CANopen設備接入EtherCAT主站控制器
EtherCAT主站控制器系統實時性測試

ZMC900E 國產EtherCAT主站控制器 — 電源口傳導騷擾整改






 工商網監
工商網監
評論