") 自動(dòng)駕駛“加速”,車載紅外熱像儀在多傳感器融合中的應(yīng)用
自動(dòng)駕駛“加速”,車載紅外熱像儀在多傳感器融合中的應(yīng)用
多傳感器融合是自動(dòng)駕駛的必由之路。實(shí)現(xiàn)高級(jí)別的輔助駕駛、自動(dòng)駕駛,需要多種傳感器相互配合,共同構(gòu)建汽車的感知系統(tǒng)。車載紅外熱像儀探測(cè)的是物體表面輻射的紅外能量,在低照度、雨雪、霧霾、沙塵等場(chǎng)景條件下,依舊可以清晰成像,可有效彌補(bǔ)其他傳感器不足,提升駕駛安全性。
高級(jí)別輔助駕駛和自動(dòng)駕駛,若依賴單一傳感器進(jìn)行感知測(cè)距等工作,可能出現(xiàn)錯(cuò)誤感知、漏感知、感知精度低等問(wèn)題。使用多類傳感器分別獲取不同的感知信息,信息之間相互補(bǔ)充,可顯著提高系統(tǒng)的冗余度和容錯(cuò)性,保證決策的快速性和正確性。
聯(lián)合感知通過(guò)結(jié)合各個(gè)傳感器的優(yōu)點(diǎn),達(dá)到1+1>2的效果。如下圖所示,紅外傳感器結(jié)合激光雷達(dá),不但能夠準(zhǔn)確獲取環(huán)境信息,而且能獲得準(zhǔn)確的深度信息。
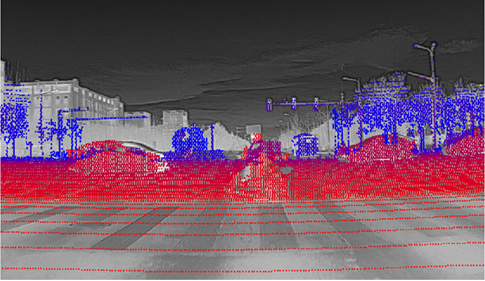
△ 紅外雷達(dá)聯(lián)合成像
傳感器聯(lián)合感知能夠有效防止誤檢和漏檢并且獲得更多環(huán)境信息。如下方圖片所示,由于車輛遮擋,雷達(dá)傳感器未能完全感知出所有目標(biāo)。而在聯(lián)合紅外2D感知結(jié)果后,實(shí)現(xiàn)了對(duì)于周圍環(huán)境的完全感知。

△夜間紅外2D感知結(jié)果
單獨(dú)依靠紅外進(jìn)行感知,無(wú)法準(zhǔn)確獲得障礙物的三維坐標(biāo)
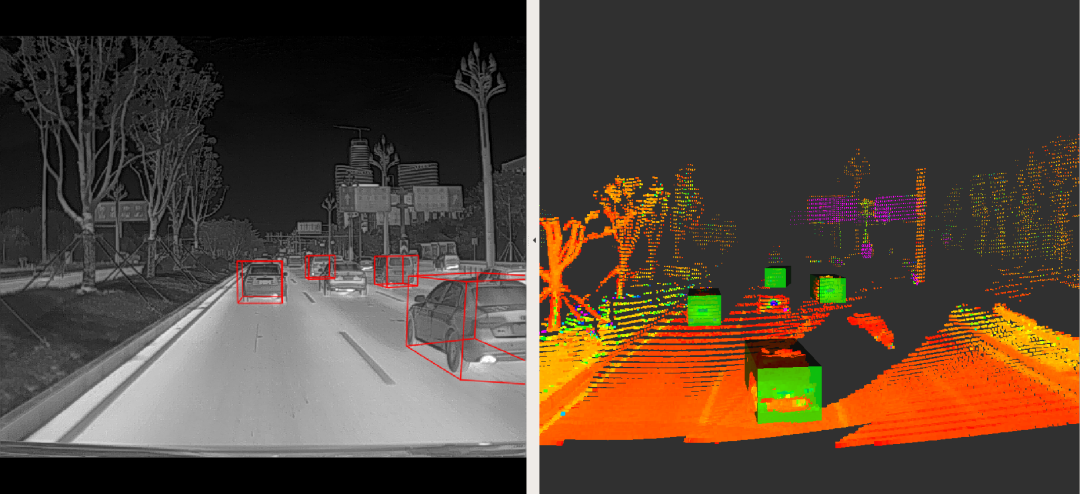
△ 基于激光雷達(dá)的環(huán)境感知結(jié)果
單獨(dú)依靠雷達(dá)進(jìn)行感知,當(dāng)遇到障礙物遮擋時(shí)
無(wú)法準(zhǔn)確感知物體

△ 多傳感器聯(lián)合感知
聯(lián)合感知有效結(jié)合各傳感器的優(yōu)點(diǎn),實(shí)現(xiàn)完全感知
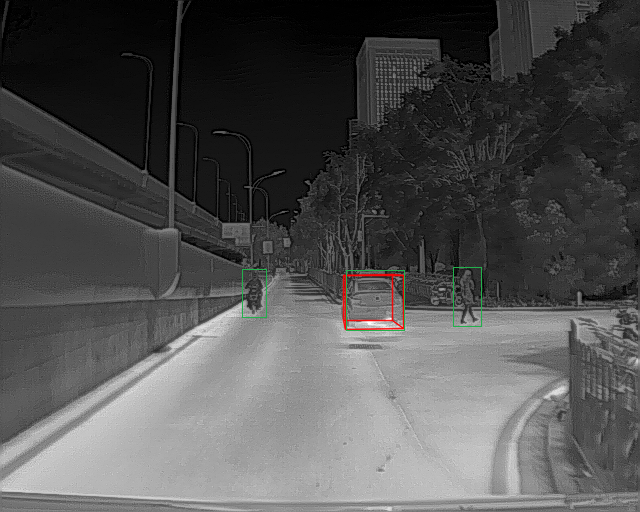
如下方圖片所示,走路和騎電動(dòng)車的行人由于體積較小,反射數(shù)據(jù)數(shù)量有限,難以被有效感知。而在聯(lián)合紅外2D感知結(jié)果后,騎行者和行人能夠被正確感知。

△ 夜間紅外2D感知結(jié)果
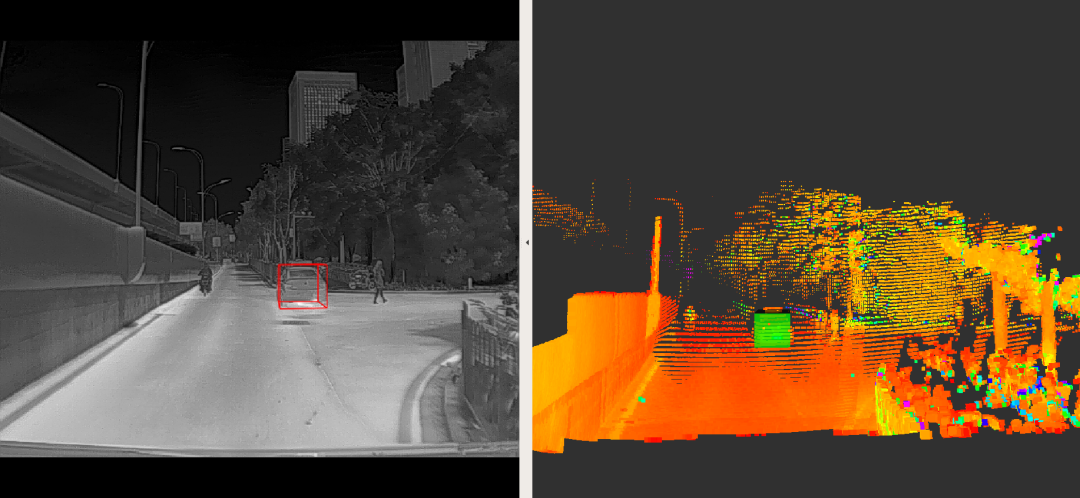
△ 基于激光雷達(dá)的環(huán)境感知結(jié)果
走路和騎電動(dòng)車的行人由于體積較小,反射數(shù)據(jù)數(shù)量有限
難以被激光雷達(dá)有效感知
△ 多傳感器聯(lián)合感知
聯(lián)合紅外2D感知結(jié)果后,周圍環(huán)境被完全感知
從技術(shù)層面上來(lái)說(shuō),紅外熱成像相比可見光攝像頭、激光雷達(dá)、毫米波雷達(dá)等其他傳感器而言,優(yōu)勢(shì)在于具有夜視能力以及受雨雪、霧霾、沙塵影響小,同時(shí)紅外熱成像對(duì)生命體的感知非常靈敏,可作為夜間、惡劣天氣輔助駕駛或者增加自動(dòng)駕駛安全性和可靠性的極佳選擇和補(bǔ)充。
睿創(chuàng)微納深耕車載紅外夜視領(lǐng)域多年,是國(guó)內(nèi)汽車紅外市場(chǎng)的先行者,多年來(lái)積極推動(dòng)紅外在汽車行業(yè)的應(yīng)用。公司在紅外傳感器技術(shù)、芯片封裝技術(shù)、紅外專用芯片處理技術(shù)等方面均保持領(lǐng)先優(yōu)勢(shì),為車載紅外夜視產(chǎn)品提供有利支撐。旗下Asens系列等汽車紅外熱像儀產(chǎn)品,通過(guò)IATF16949車規(guī)體系認(rèn)證,在自動(dòng)駕駛、汽車輔助駕駛(ADAS)、特種車輛應(yīng)用等領(lǐng)域,皆擁有廣闊的應(yīng)用前景,目前已在不同類型客戶的場(chǎng)景得到應(yīng)用。
-
傳感器
+關(guān)注
關(guān)注
2553文章
51395瀏覽量
756602 -
艾睿光電
+關(guān)注
關(guān)注
0文章
111瀏覽量
221
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
物聯(lián)網(wǎng)中的傳感器類型解析 傳感器類型在自動(dòng)駕駛中的應(yīng)用
多傳感器融合在自動(dòng)駕駛中的應(yīng)用趨勢(shì)探究

一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
車載傳感器主要有哪些傳感器
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛識(shí)別技術(shù)有哪些
自動(dòng)駕駛的傳感器技術(shù)介紹
自動(dòng)駕駛汽車傳感器有哪些
XV7181BB 陀螺儀傳感器在自動(dòng)駕駛設(shè)備中的應(yīng)用

揭秘自動(dòng)駕駛:未來(lái)汽車的感官革命,究竟需要哪些超級(jí)傳感器?
自動(dòng)駕駛:揭秘高精度時(shí)間同步技術(shù)(一)

康謀技術(shù) |深入探討:自動(dòng)駕駛中的相機(jī)標(biāo)定技術(shù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論