") ADAS DV&PV試驗測試臺架的方案分享
ADAS DV&PV試驗測試臺架的方案分享
為了在當下高速發(fā)展的自動駕駛中始終保持產(chǎn)品核心競爭力,各廠商皆迫切持續(xù)改進現(xiàn)有產(chǎn)品并迭代新興技術(shù),而快速的產(chǎn)品迭代并量產(chǎn)容易導致產(chǎn)品問題頻出,進而引發(fā)現(xiàn)場故障、高昂售后、產(chǎn)品召回、品牌危機等問題。
設(shè)計驗證試驗(DV-Design Verification)及產(chǎn)品驗證試驗(PV-Product Validation)是一種有效的工程手段來盡量消除潛在失效模式出現(xiàn)在未來產(chǎn)品中,并確保產(chǎn)品的功能、性能、可靠性、穩(wěn)定性符合產(chǎn)品設(shè)計預期及客戶需求;而高效的DV&PV自動化試驗測試臺架方案將有助于測試開展、異常捕捉、故障檢查及問題分析,持續(xù)縮短產(chǎn)品開發(fā)、改進及驗證周期,以確保產(chǎn)品交付時間及品質(zhì)。
1、DV&PV試驗需求
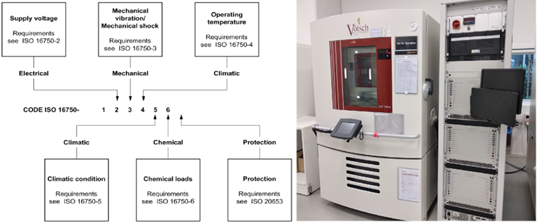
DV&PV試驗測試要求根據(jù)產(chǎn)品特性及試驗標準(ISO-16750),在機械、電器、環(huán)境、化學等試驗條件下開展多個被測件(DUT)的環(huán)境可靠性試驗及電氣性能試驗;自動化試驗測試臺架則為上述試驗的開展提供全生命周期、高穩(wěn)定性的電氣模擬、實時狀態(tài)監(jiān)控、過程數(shù)據(jù)記錄及測試報告生成等功能。
2、自動化試驗測試臺架技術(shù)方案
2.1自動化試驗測試臺架系統(tǒng)框架
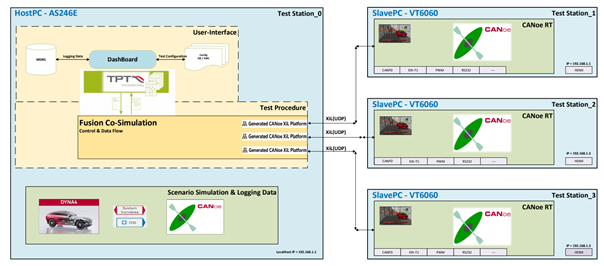
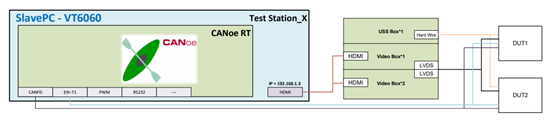
DV&PV自動化試驗測試臺架(LTT-Life Time Tester)主要由用戶交互界面GUI、測試策略管理軟件TPT及分布式CANoe RT從機構(gòu)成;測試策略管理軟件TPT、車輛及場景仿真軟件DYNA4、RT系統(tǒng)配置工具CANoe皆運行在Host PC中,其中用戶交互界面GUI負責測試系統(tǒng)上位機的信息顯示及測試操作功能,而分布式CANoe RT從機實現(xiàn)對VT system設(shè)備的調(diào)用和網(wǎng)絡(luò)通訊的仿真;TPT作為測試策略管理軟件,則完成對Dashboard GUI及CANoe RT從機資源及接口的統(tǒng)一管理,并通過其FUSION Co-Simulation機制完成多DUT的并行測試。
2.2測試策略管理軟件TPT
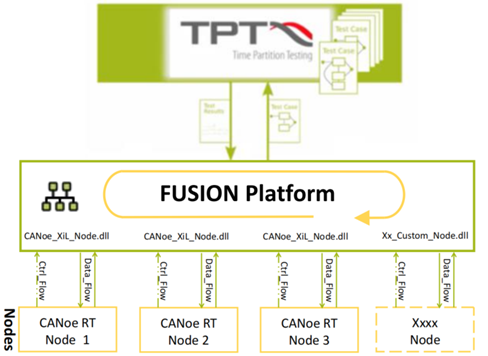
TPT支持汽車電子主流的工具鏈來覆蓋產(chǎn)品開發(fā)的整個V模式(MiL、SiL、PiL、HiL、ViL)下所有的測試階段,并以圖形化建立狀態(tài)機形式的測試用例,復用度高而無需更換測試工具。其強大的Fusion Platform使用戶可以輕松創(chuàng)建包含不同組件的仿真環(huán)境,以實現(xiàn)對多節(jié)點交互控制及聯(lián)合仿真;仿真節(jié)點類型涵蓋了CANoe Node、 dSPACE HiL Node、INCA Client Node、Speedgoat Node及Custom Node DLL等。
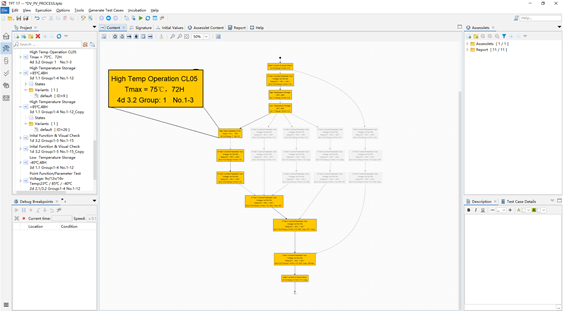
》狀態(tài)機定義測試驗證運行模式及試驗流程:
》FUSION Platform多節(jié)點支持與Multi CANoe接合以實現(xiàn)多個ADAS控制器的并行測試:
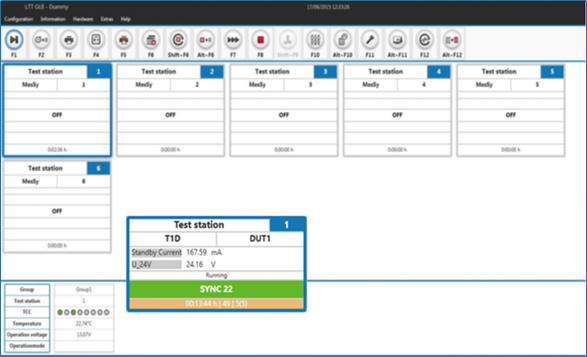
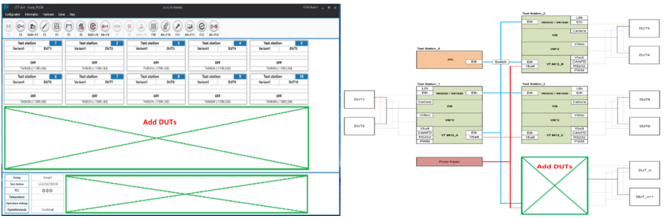
》獨立測試平臺Dashboard定制開發(fā)適應(yīng)于試驗監(jiān)控的GUI,其具備運行模式配置(F11)、工作模式切換(F1/F8)、DUT通道配置(F7)、運行狀態(tài)顯示、異常提示、故障碼查詢、數(shù)據(jù)庫更新及測試報告生成等功能:
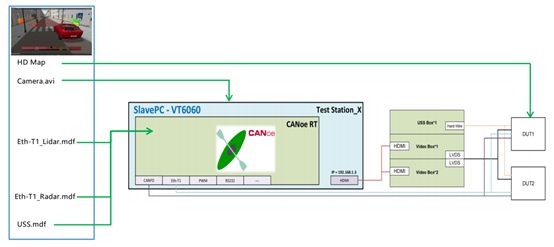
2.3 LTT系統(tǒng)硬件框架
ADAS控制器的LIDAR、RADAR、USS等傳感器信號及CAN FD、Ethernet等通信接口都采用Vector VT system對應(yīng)功能板卡進行適配,外設(shè)激勵信號最終通過各端口I/O注入到DUT中。
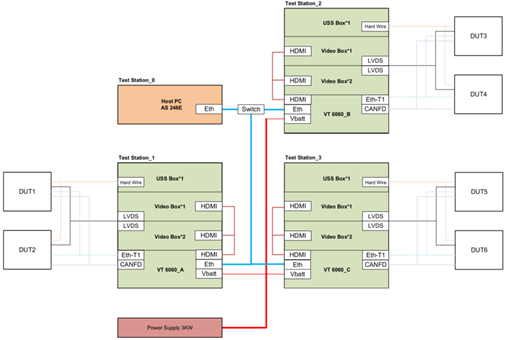
可選用CANoe RT實時從機板卡VT6060、車載以太網(wǎng)通訊板卡VT6306、CAN FD通訊板卡VT6104A、通用數(shù)字I/O板卡VT2848等功能模塊進行差異化配置以適應(yīng)ADAS控制的所有外部傳感器及網(wǎng)絡(luò)通信需求。
2.4 ADAS傳感器數(shù)據(jù)采集及回灌
DV&PV試驗中ADAS控制器需要其工作在特定的場景以驗證其所有外設(shè)接口、信號處理電路及SOC算力耐久穩(wěn)定性;而在Vector DYNA4中可自由創(chuàng)建車輛及外部環(huán)境仿真模型以驗證自動駕駛的特定應(yīng)用場景,并通過配置Camera、LIDAR、RADAR、USS等參數(shù)以生成與場景關(guān)聯(lián)的各種傳感器數(shù)據(jù);最后通過ASAM OSI及MDF的方式輸出場景數(shù)據(jù),以便進行分布式多DUT的數(shù)據(jù)回灌。
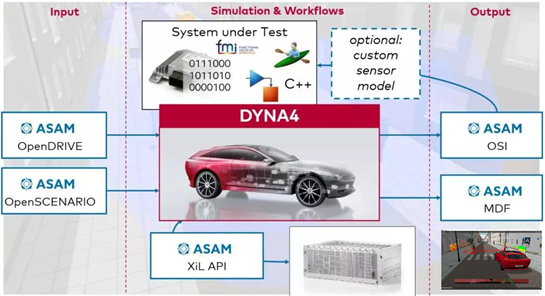
通過多從機中CANoe RT及視頻回播可將攜帶指定仿真場景的OSI及MDF格式的數(shù)據(jù)回灌入ADAS控制器中,以滿足在特定工作模式及試驗場景下功能、性能、可靠性及穩(wěn)定性的驗證。
2.5 LTT方案拓展性
》擴展多DUT(6+)并行測試
實施DV&PV試驗中,需靈活配置1~6個DUT及多于6個DUT進行同時驗證,而Dashboard GUI及分布式CANoe RT框架在系統(tǒng)軟、硬件框架上皆可進行彈性配置,以滿足多樣化的測試驗證需求。
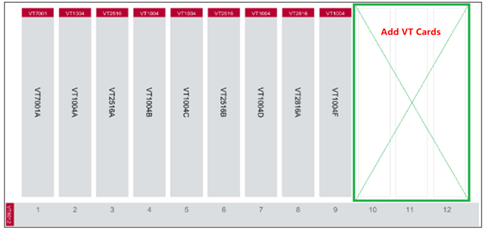
》擴展單DUT功能(VT板卡)
分布式CANoe RT從機采用Vector VT system方案,其中實時機VT6060可通過USB接口外掛VN1600&VN5000網(wǎng)絡(luò)設(shè)備,而VT8012機箱可插入VT各功能板卡(VT2848 Digital I/O Modules、VT2816 Analog I/O Modules、VT2004 Stimulation Modules、VT2832 Switch Matrix Module等),從而以增加各類型信號端口及模擬負載。
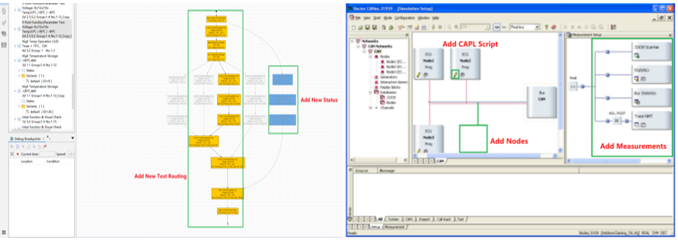
》擴展TPT狀態(tài)機模式&CANoe仿真程序
TPT狀態(tài)機模式可以支持用戶根據(jù)試驗需求進行自定義開發(fā),自主添加測試工作模式及自由組合測試流程;同時CANoe仿真軟件支持仿真節(jié)點、CAPL程序的自適應(yīng)開發(fā),其測量分析功能便于功能測試及問題分析。
3、總結(jié)
本文簡要介紹了ADAS控制器在DV&PV試驗中自動化測試臺架(LTT)的技術(shù)方案,從系統(tǒng)軟、硬件方面說明技術(shù)方案的平臺性、實用性;整個方案采用全棧測試策略管理軟件TPT、車輛及環(huán)境場景仿真軟件DYNA4、測試仿真軟件CANoe及VT system硬件系統(tǒng),保證了自動化測試臺架在DV&PV全生命周期驗證中的可靠性、穩(wěn)定性及可擴展性,從而將試驗驗證重心放在ADAS產(chǎn)品本身中以加速迭代周期及品質(zhì)提升。
參考文獻
1. ISO 16750-1:2018 Road vehicles-Environmental conditions and testing for electrical and electronic equipment
2. IEC 60068-1:2013 Environmental testing - Part 1: General and guidance
3. ADAS-HIL_System-Information.pdf
文中部分內(nèi)容參考于Vector/PikeTec
-
adas
+關(guān)注
關(guān)注
309文章
2193瀏覽量
208860
發(fā)布評論請先 登錄
相關(guān)推薦
如何判斷產(chǎn)品需不需要做AT&T認證?AT&T測試內(nèi)容和要求分享

北美運營商AT&amp;amp;T認證中的VoLTE測試項
北美運營商AT&amp;amp;T認證的測試內(nèi)容有哪些?

迅為itop-3568開發(fā)板AMP雙系統(tǒng)使用手冊之燒寫AMP鏡像
北美運營商AT&amp;amp;T認證的費用受哪些因素影響

onsemi LV/MV MOSFET 產(chǎn)品介紹 &amp;amp; 行業(yè)應(yīng)用

基于 onsemi NCV78343 &amp;amp; NCV78964的汽車矩陣式大燈方案

電動汽車充電樁測試臺架的相關(guān)介紹

OC7201C資料(PCB &amp; 原理圖)
FS201資料(pcb &amp; DEMO &amp; 原理圖)
北美運營商AT&amp;amp;T認證入庫產(chǎn)品范圍名單相關(guān)
解讀北美運營商,AT&amp;amp;T的認證分類與認證內(nèi)容分享
利爾達NB-IoT &amp;amp;Cat.1 產(chǎn)測應(yīng)用指導

Open RAN的未來及其對AT&amp;T的意義
【電磁兼容技術(shù)文檔分享】頻譜儀應(yīng)用案例&amp;amp;簡易探頭的制作






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論