") 什么飛行時(shí)間測(cè)量法?
什么飛行時(shí)間測(cè)量法?
同軸脈沖式TOF技術(shù),即Time of Flight 它是一種進(jìn)行光飛行的時(shí)間測(cè)量方式,就是發(fā)射出一道激光,然后會(huì)有一種二極管來(lái)進(jìn)行激光的回波檢測(cè),我們?cè)谠偈褂靡粋€(gè)精度很高的計(jì)時(shí)器去測(cè)量光波發(fā)射到目標(biāo)物引起反饋再回來(lái)的時(shí)間差,然而我們知道光束具有不變性,再將時(shí)間差乘以光速就可以得到目標(biāo)物體的距離,而這個(gè)就是被現(xiàn)在主流各大工業(yè)級(jí)別激光雷達(dá)所采用的距離測(cè)量的方式,技術(shù)(光學(xué),算法等)門(mén)檻較高,目前國(guó)內(nèi)僅有深圳不止技術(shù)的激光雷達(dá)采用這種技術(shù),實(shí)際上這種測(cè)量方式有一個(gè)比較大的問(wèn)題,它的成本較高,因?yàn)檫M(jìn)行光束的測(cè)量需要非常高精度的計(jì)時(shí)器,這個(gè)計(jì)時(shí)器并不是說(shuō)只要能區(qū)分出毫秒和微秒就夠了,他還需要達(dá)到皮秒級(jí)別的測(cè)量精度,此外對(duì)于激光器和檢測(cè)的傳感器來(lái)說(shuō),都需要非常高端的器件,并且在光學(xué)上也有很高的要求。
深圳市不止技術(shù)有限公司是激光雷達(dá)行業(yè)頭部知名企業(yè),團(tuán)隊(duì)自2016年底就開(kāi)始了多款激光雷達(dá)方案的研發(fā),并創(chuàng)造了30多件發(fā)明專(zhuān)利,我們作為激光雷達(dá)行業(yè)5年多的資深老兵,對(duì)激光雷達(dá)有著深厚的技術(shù)積累。是一家能提供單點(diǎn)、單線(xiàn)到多線(xiàn)全系列、dtof、itof全品類(lèi)激光雷達(dá)方案定制化的公司,而且掌握了機(jī)器人移動(dòng)底盤(pán)技術(shù)。在激光雷達(dá)核心硬件、專(zhuān)用芯片、AI算法上具有完整的自主知識(shí)產(chǎn)權(quán),大量適用送餐機(jī)器人,服務(wù)機(jī)器人,清潔機(jī)器人,無(wú)人叉車(chē),AGV小車(chē)等場(chǎng)景
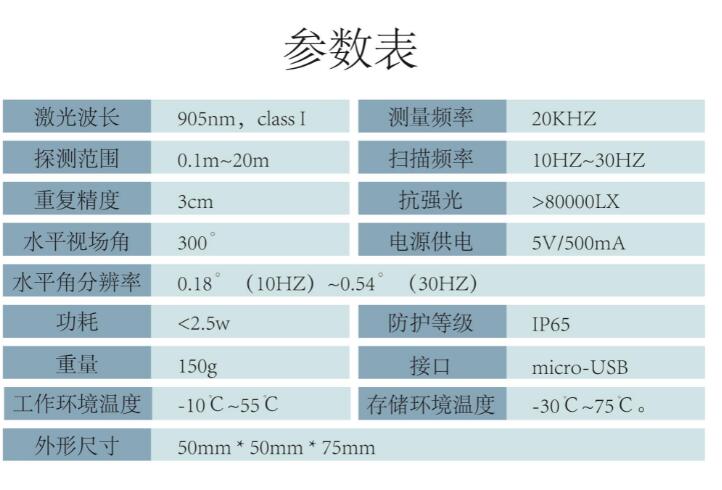 深圳不止技術(shù)激光雷達(dá)參數(shù)?
深圳不止技術(shù)激光雷達(dá)參數(shù)? -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
4024瀏覽量
190400
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
FPGA頻率測(cè)量的三種方法
重磅新品 | 美芯晟發(fā)布全集成直接飛行時(shí)間(dToF)傳感器MT3801

集成時(shí)間數(shù)字轉(zhuǎn)換器簡(jiǎn)化了飛行時(shí)間測(cè)距應(yīng)用的設(shè)計(jì)

飛行時(shí)間和激光雷達(dá) - 光學(xué)前端設(shè)計(jì)應(yīng)用說(shuō)明

開(kāi)爾文測(cè)量法是如何工作的
OPT8320 3D飛行時(shí)間傳感器(短)數(shù)據(jù)表
OPT8241 3D飛行時(shí)間傳感器數(shù)據(jù)表
OPT9221飛行時(shí)間控制器數(shù)據(jù)表
UWB利用飛行時(shí)間(ToF)從容應(yīng)對(duì)百威啤酒廠(chǎng)倉(cāng)庫(kù)物流難題

直接飛行時(shí)間(dToF) SiPM LiDAR 平臺(tái)SECO-測(cè)距儀-GEVK數(shù)據(jù)手冊(cè)

電路板維修在線(xiàn)測(cè)量法
意法半導(dǎo)體宣布推出一款全能型、直接式飛行時(shí)間3D激光雷達(dá)模組
意法半導(dǎo)體的多區(qū)飛行時(shí)間(ToF)傳感器系列介紹

多區(qū)飛行時(shí)間(ToF)傳感器的特點(diǎn)

飛行時(shí)間傳感器:技術(shù)原理與多元應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論