 EtherCAT運動控制卡的總線軸參數設置和軸運動
EtherCAT運動控制卡的總線軸參數設置和軸運動
今天,正運動技術為大家分享一下《EtherCAT運動控制卡的總線軸參數設置和軸運動》。在正式學習之前,我們先了解一下正運動技術的運動控制卡ECI2618和ECI2828。這兩款產品分別是6軸,8軸運動控制卡。

ECI2618支持6軸脈沖輸入與編碼器反饋,板載24點輸入,16點輸出,2AD,2DA,支持手輪接口,其中特定輸出口支持高速PWM控制。

ECI2828支持8軸總線型輸入與編碼器反饋,板載24點輸入,16點輸出,2路AD,2路DA,支持手輪接口,其中特定輸出口支持高速PWM控制。
ECI2618,ECI2828均使用同一套API函數,均支持C、C++、C#、LabVIEW、Python、Delphi等開發語言,支持VC6.0、VB6.0、Qt、.Net等平臺,支持Windows、Linux、WinCE、iMac等操作系統。
接下來,進入正題。本節我們主要給大家分享一下EtherCAT運動控制卡之ECI2820如何使用C#進行EtherCAT總線軸運動和軸參數設置。
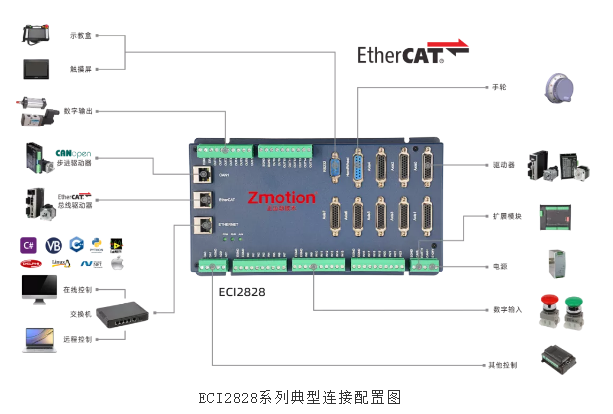
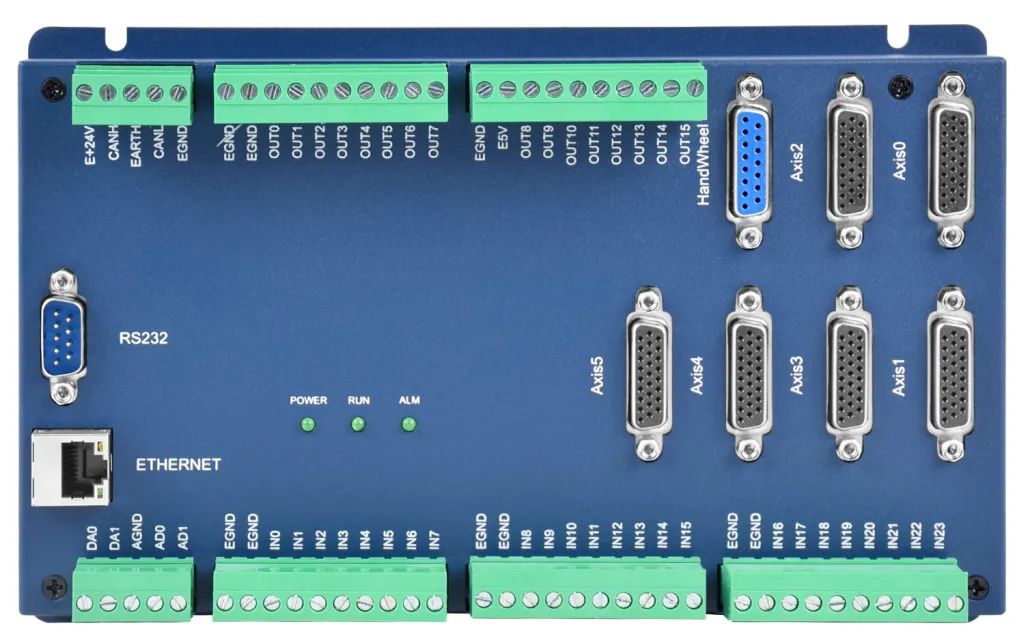
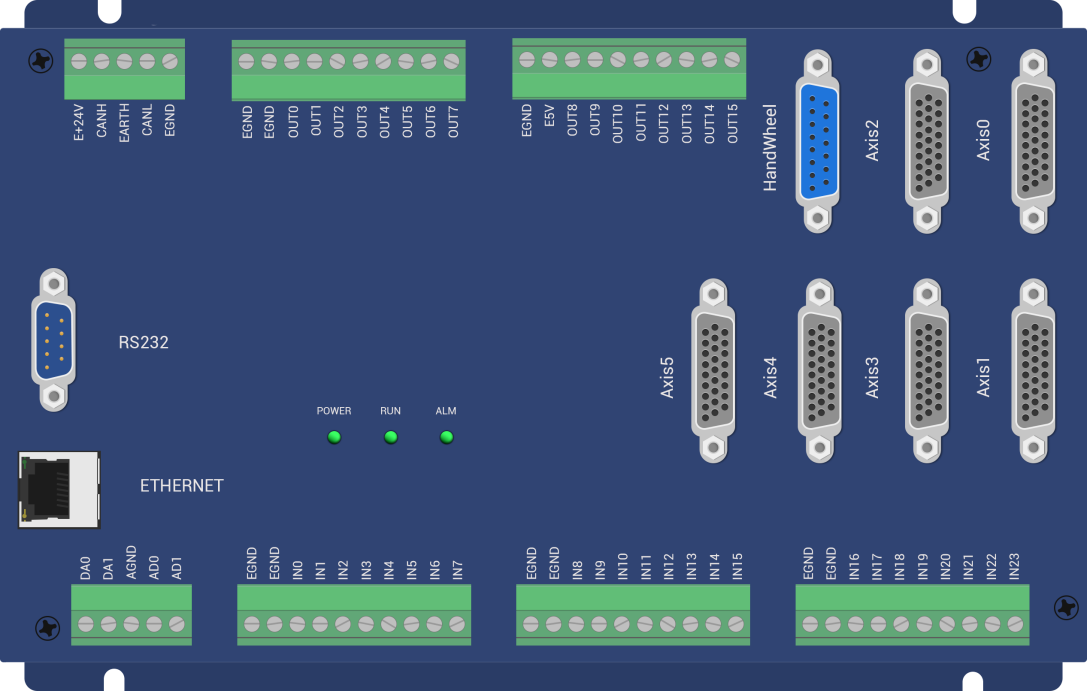
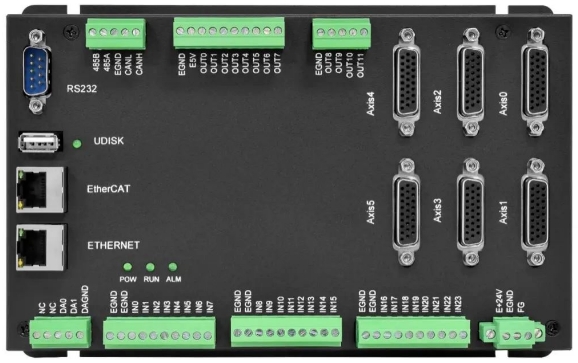
一 ECI2828運動控制卡硬件介紹
ECI2828系列運動控制卡支持多達 16 軸直線插補、任意圓弧插補、空間圓弧、螺旋插補、電子凸輪、電子齒輪、同步跟隨、虛擬軸、機械手指令等;采用優化的網絡通訊協議可以實現實時的運動控制。
ECI2828系列運動運動控制卡支持以太網,232 通訊接口和電腦相連,接收電腦的指令運行,可以通過EtherCAT總線和CAN總線去連接各個擴展模塊,從而擴展輸入輸出點數或運動軸。
ECI2828系列運動控制卡的應用程序可以使用 VC,VB,VS,C++,C#等軟件來開發,程序運行時需要動態庫 zmotion.dll。調試時可以把ZDevelop軟件同時連接到控制器,從而方便調試、方便觀察。
二 C#語言進行運動控制開發
1.新建MFC項目并添加函數庫
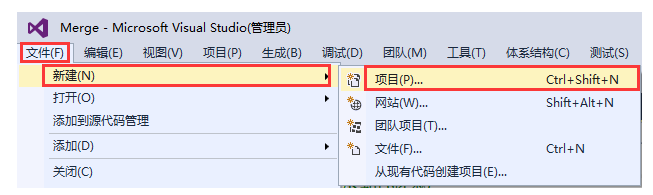
(1)在VS2015菜單“文件”→“新建”→ “項目”,啟動創建項目向導。
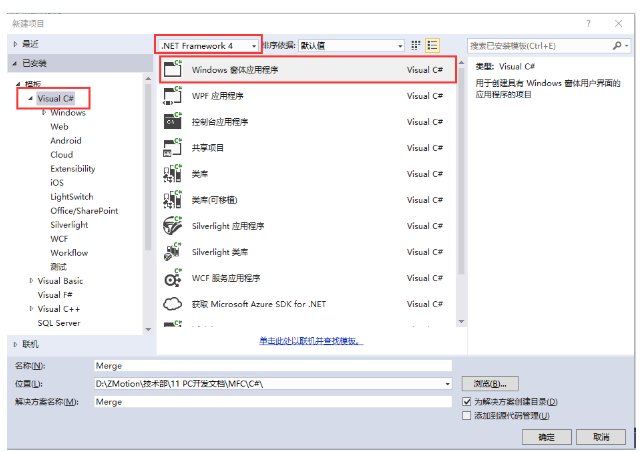
(2)選擇開發語言為“Visual C#”和.NET Framework 4以及Windows 窗體應用程序。
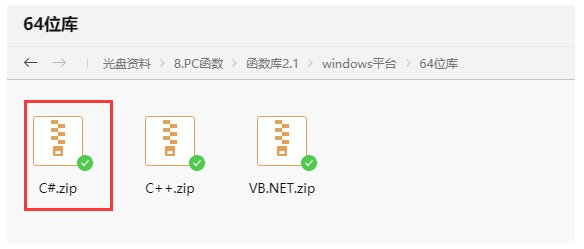
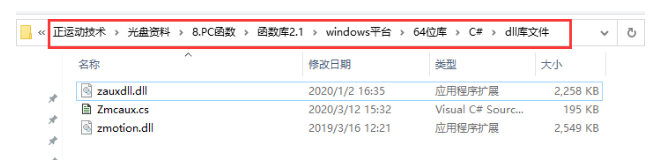
(3)找到廠家提供的光盤資料里面的C#函數庫,路徑如下(64位庫為例):
A、進入廠商提供的光盤資料找到“8.PC函數”文件夾,并點擊進入。

B、選擇“函數庫2.1”文件夾。
C、選擇“Windows平臺”文件夾。
D、根據需要選擇對應的函數庫這里選擇64位庫。
E、解壓C#的壓縮包,里面有C#對應的函數庫。
F、函數庫具體路徑如下。
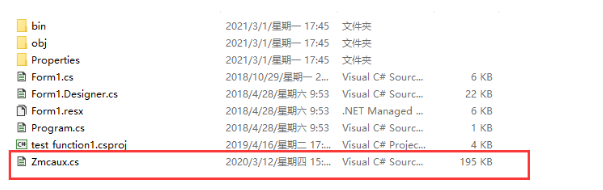
(4)將廠商提供的C#的庫文件以及相關文件復制到新建的項目中。
A、將zmcaux.cs文件復制到新建的項目里面中。
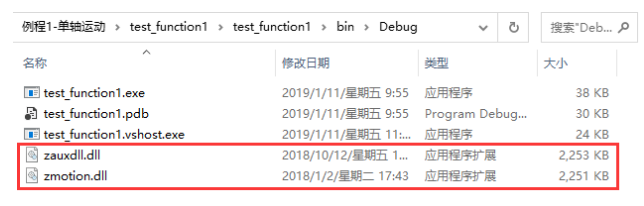
B、將zaux.dll和zmotion.dll文件放入bin\debug文件夾中。
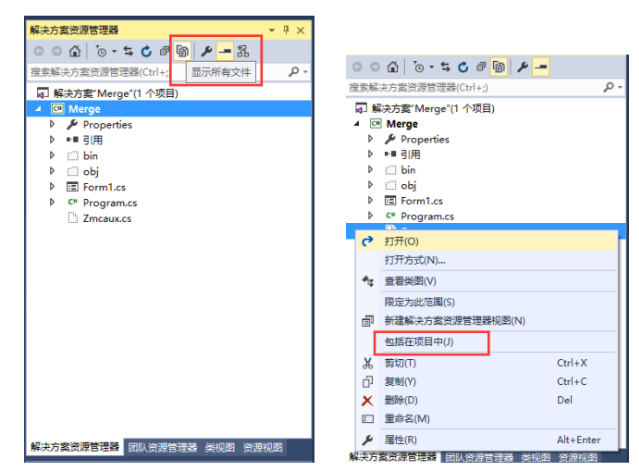
(5)用vs打開新建的項目文件,在右邊的解決方案資源管理器中點擊顯示所有,然后鼠標右鍵點擊zmcaux.cs文件,點擊包括在項目中。
(6)雙擊Form1.cs里面的Form1,出現代碼編輯界面,在文件開頭寫入 using cszmcaux,并聲明控制器句柄g_handle。
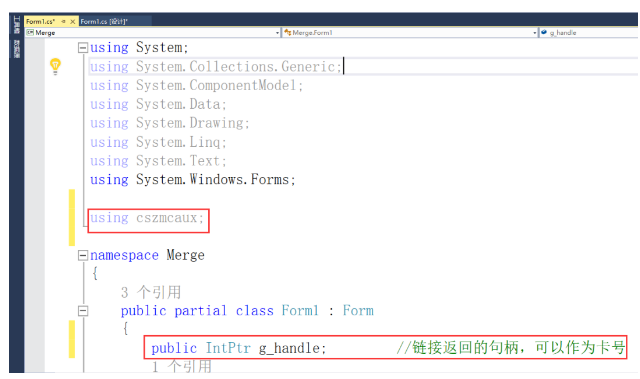
至此項目新建完成,可進行C#項目開發。
2.PC函數介紹
A、PC函數手冊也在光盤資料里面,具體路徑如下:“光盤資料\8.PC函數\函數庫2.1\ZMotion函數庫編程手冊 V2.1.pdf”。
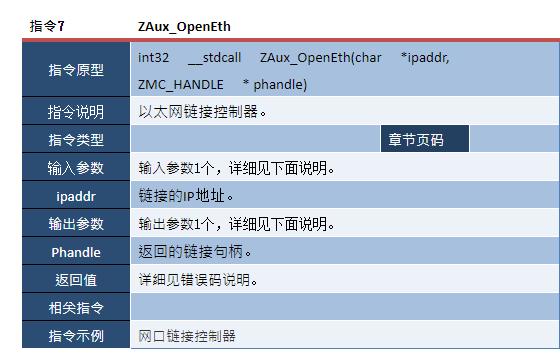
B、PC編程,一般如果網口對控制器和工控機進行鏈接。網口鏈接函數接口是ZAux_OpenEth();如果鏈接成功,該接口會返回一個鏈接句柄。通過操作這個鏈接句柄可以實現對控制器的控制。
ZAux_OpenEth()接口說明:
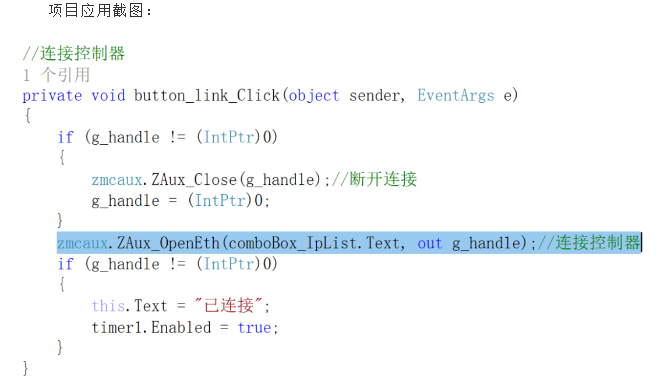
項目應用截圖:
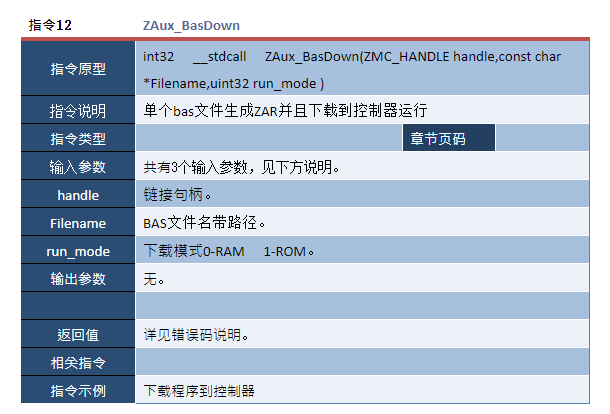
C、我們會提供EtherCAT總線初始化的basic代碼,可以通過指令ZAux_BasDown()將總線初始化的basic代碼下載到控制器中,從而實現EtherCAT總線軸的初始化。
D、使用PC函數庫里面的相關的函數接口,通過操作鏈接句柄“g_handle”,對控制器進行軸參數的設置和獲取。
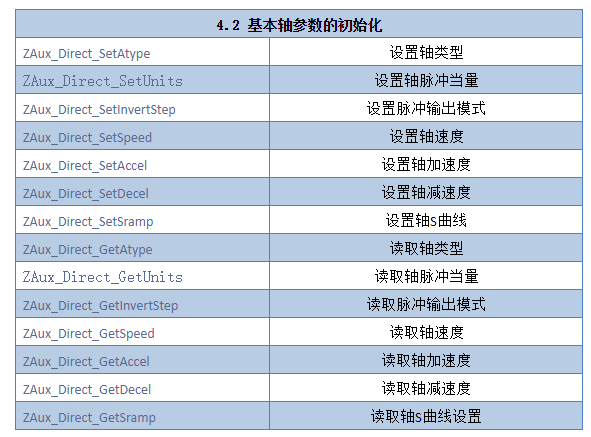
軸參數設置相關函數接口:
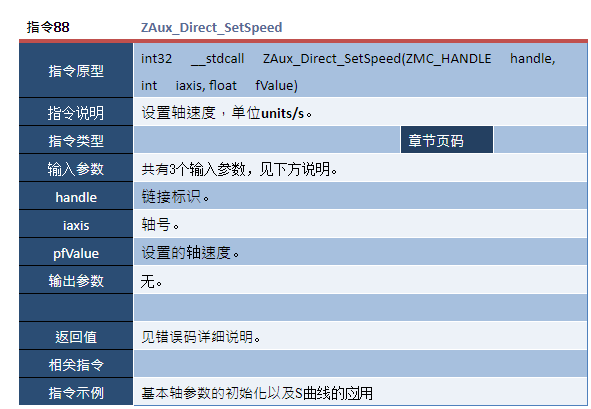
軸運動速度設置接口說明:
E、使用ZAux_BusCmd_SDORead()和ZAux_BusCmd_SDOWrite()接口,實現對總線驅動器SDO參數的讀寫。

3、C#開發實現EtherCAT總線軸運動
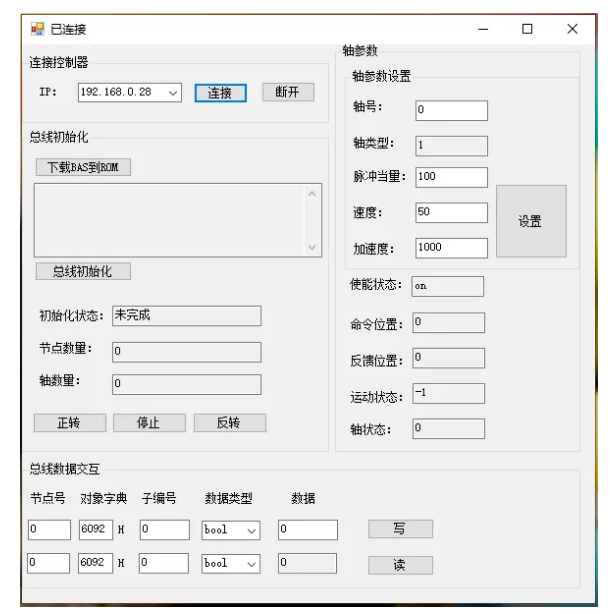
(1)EtherCAT總線軸運動控制例程界面如下。
(2)例程簡易流程圖。
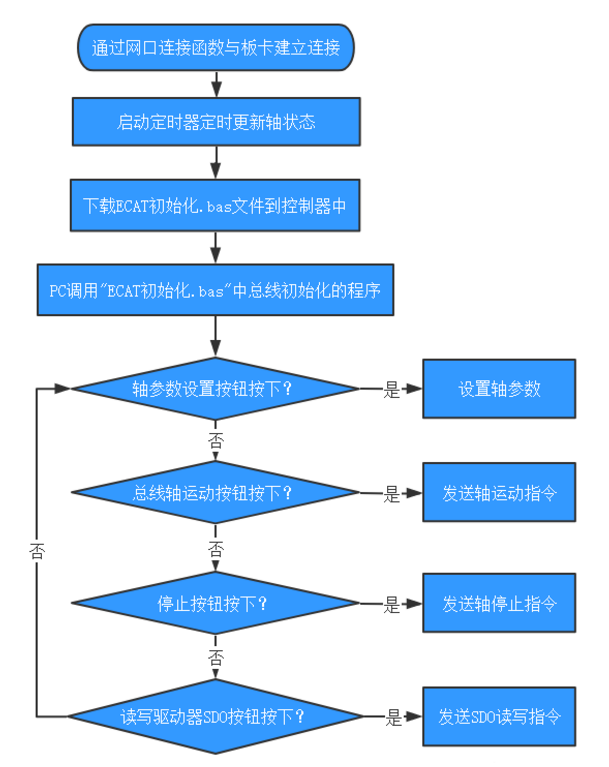
(3)EtherCAT總線初始化Basic程序介紹,先將該程序下載到控制器中,PC再調用下面的總線初始化函數,即可完成總線初始化。
'********************ECAT總線初始化****************
global CONST BUS_TYPE = 0 '總線類型。
global CONST MAX_AXISNUM = 16 '最大軸數
global CONST Bus_Slot = 0 '槽位號0
global CONST Bus_AxisStart = 0 '總線軸起始軸號
global Bus_InitStatus '總線初始化完成狀態
Bus_InitStatus = -1
global Bus_TotalAxisnum '檢查掃描的總軸數
delay(3000) '延時3S等待驅動器上電
Ecat_Init()
end
global sub Ecat_Init()
'初始化還原軸類型
for i=0 to MAX_AXISNUM - 1
AXIS_ENABLE(i) = 0
ATYPE(i)=0
next
'掃描總線
Bus_InitStatus = -1
Bus_TotalAxisnum = 0
SLOT_STOP(Bus_Slot)
DELAY(200)
SLOT_SCAN(Bus_Slot)
'如果掃描成功
if return then
?"總線掃描成功","連接設備數:"NODE_COUNT(Bus_Slot)
?
?"開始映射軸號"
'遍歷總線下所有從站節點
for i=0 to NODE_COUNT(Bus_Slot)-1
'判斷當前節點是否有電機
if NODE_AXIS_COUNT(Bus_Slot,i) <>0 then
for j=0 to NODE_AXIS_COUNT(Bus_Slot,i)-1
'映射軸號
AXIS_ADDRESS(Bus_AxisStart+i)=Bus_TotalAxisnum+1
'設置控制模式 65-位置 66-速度 67-轉矩
ATYPE(Bus_AxisStart+i)=65
'設置PROFILE功能
DRIVE_PROFILE(Bus_AxisStart+i)= 4
'每軸單獨分組
DISABLE_GROUP(Bus_AxisStart+i)
'映射驅動器上的IO起始地址
DRIVE_IO(Bus_AxisStart+i) = 128 + (Bus_AxisStart+i)*16
'設置限位信號
REV_IN(Bus_AxisStart+i) = 128 + (Bus_AxisStart+i)*16
FWD_IN(Bus_AxisStart+i) = 129 + (Bus_AxisStart+i)*16
DATUM_IN(Bus_AxisStart+i) = 130 + (Bus_AxisStart+i)*16
INVERT_IN(128 + (Bus_AxisStart+i)*16,off)
INVERT_IN(129 + (Bus_AxisStart+i)*16,off)
INVERT_IN(130 + (Bus_AxisStart+i)*16,off)
'總軸數+1
Bus_TotalAxisnum=Bus_TotalAxisnum+1
next
endif
next
?"軸號映射完成","連接總軸數:"Bus_TotalAxisnum
WA 2000
'啟動總線
SLOT_START(Bus_Slot)
if return then
?"總線開啟成功"
?"開始清除驅動器錯誤(根據驅動器數據字典設置)"
for i= Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1
DRIVE_CONTROLWORD(i)=128 '根據驅動器數據字典
wa 100
DRIVE_CONTROLWORD(i)=6
wa 100
DRIVE_CONTROLWORD(i)=15
wa 100
next
?"驅動器錯誤清除完成"
wa 100
?"清除控制器錯誤"
DATUM(0)
DRIVE_CLEAR(0)
?"控制器錯誤清除完成"
wa 100
?"軸使能準備"
for i= Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1
base(i)
AXIS_ENABLE=1
next
'使能總開關
WDOG=1
Bus_InitStatus = 1
?"軸使能完成"
else
?"總線開啟失敗"
Bus_InitStatus = 0
endif
else
?"總線掃描失敗"
Bus_InitStatus = 0
endif
end sub
(4)在連接按鈕的事件處理函數中調用接口ZAux_OpenEth(),實現與控制器的連接。
//網口連接控制器
private void C_Open_Eth_Click(object sender, EventArgs e)
{
zmcaux.ZAux_OpenEth(C_Ip_Address.Text, out g_handle);
if (g_handle != (IntPtr)0)
{
this.Text = "已連接";
timer1.Enabled = true;
}
}
(5)通過定時器更新控制器軸參數和總線軸初始化情況。
//定時器
private void timer1_Tick(object sender, EventArgs e)
{
int ret = 0;
float[] f_AxisPara = new float[10];
int[] i_AxisPara = new int[10];
if (g_handle != (IntPtr)0)
{
//獲取軸參數,軸狀態
m_axisnum = Convert.ToInt32(C_Move_Axis.Text);
ret += zmcaux.ZAux_Direct_GetAxisEnable(g_handle, m_axisnum, ref i_AxisPara[0]);
ret += zmcaux.ZAux_Direct_GetMpos(g_handle, m_axisnum, ref f_AxisPara[0]);
ret += zmcaux.ZAux_Direct_GetDpos(g_handle, m_axisnum, ref f_AxisPara[1]);
ret += zmcaux.ZAux_Direct_GetAxisStatus(g_handle, m_axisnum, ref i_AxisPara[1]);
ret += zmcaux.ZAux_Direct_GetIfIdle(g_handle, m_axisnum, ref i_AxisPara[2]);
if (ret == 0)
{
C_AxisEnable.Text = (i_AxisPara[0] == 0) ? "off" : "on";
C_AxisMpos.Text = f_AxisPara[0].ToString();
C_AxisDpos.Text = f_AxisPara[1].ToString();
C_AxisStatus.Text = i_AxisPara[1].ToString();
C_AxisIdle.Text = i_AxisPara[2].ToString();
}
//如果已經加載文件并且正在初始化---讀取總線初始化狀態
if (g_basflag && g_InitStatus == -1)
{
float tempstatus = -1;
int m_BusNodeNum = 0;
float m_BusAxisNum = 0;
ret += zmcaux.ZAux_Direct_GetUserVar(g_handle, "BUS_TYPE", ref Bus_type); //讀取BAS文件中的變量判斷總線類型
ret += zmcaux.ZAux_Direct_GetUserVar(g_handle, "Bus_InitStatus", ref tempstatus); //讀取BAS文件中的變量判斷總線初始化完成狀態
ret += zmcaux.ZAux_BusCmd_GetNodeNum(g_handle, 0, ref m_BusNodeNum); //讀取槽位0上節點個數。
ret += zmcaux.ZAux_Direct_GetUserVar(g_handle, "Bus_TotalAxisnum", ref m_BusAxisNum); //讀取BAS文件中的變量判斷掃描的總軸數
g_InitStatus = (int)tempstatus;
if (ret == 0 && g_InitStatus != -1)
{
C_Bus_Status.Text = (g_InitStatus == 1) ? "初始化成功" : "初始化失敗";
C_NodeNum.Text = m_BusNodeNum.ToString();
C_AxisNum.Text = m_BusAxisNum.ToString();
}
}
}
}
(6)通過BAS文件下載按鈕的事件處理函數,調用BAS文件下載接口將廠商提供的EtherCAT總線初始化的Basic代碼下載到控制器中。
//下載總線初始化的BAS文件到控制器
private void C_Download_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
}
else
{
int ret = 0;
string strFilePath;
OpenFileDialog openFileDialog1 = new OpenFileDialog();
openFileDialog1.InitialDirectory = "\";
openFileDialog1.Filter = "配置文件(*.bas)|*.bas";
openFileDialog1.RestoreDirectory = true;
openFileDialog1.FilterIndex = 1;
//打開配置文件
if (openFileDialog1.ShowDialog() == DialogResult.OK)
{
strFilePath = openFileDialog1.FileName;
C_BasFile.Text = strFilePath;
//下載到ROM
ret = zmcaux.ZAux_BasDown(g_handle, strFilePath, 1);
if (ret != 0)
{
MessageBox.Show("文件下載失敗!", "提示");
}
else
{
MessageBox.Show("文件下載成功", "提示");
}
}
}
}
(7)通過總線初始化按鈕的事件處理函數調用運行basic程序里的總線初始化函數進行總線初始化。
//總線初始化,下載ROM時程序會自動初始化一次
private void C_BusInit_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
}
else
{
int ret;
if (g_basflag && (g_InitStatus != -1))
{
g_InitStatus = -1;
StringBuilder buffer = new StringBuilder(10240);
C_Bus_Status.Text = "初始化未完成";
//調用basic程序中的總線初始化函數Ecat_Init()
ret = zmcaux.ZAux_Execute(g_handle, "RUNTASK 1,Ecat_Init", buffer, 0);
}
}
}
(8)通過設置按鈕的事件處理函數來設置軸參數。
//軸參數設置按鈕
private void AxisParaSet_Click(object sender, EventArgs e)
{
int ret = 0;
ret = zmcaux.ZAux_Direct_SetUnits(g_handle, m_axisnum, Convert.ToSingle(C_AxisUnits.Text));
ret = zmcaux.ZAux_Direct_SetSpeed(g_handle, m_axisnum, Convert.ToSingle(C_AxisSpeed.Text));
ret = zmcaux.ZAux_Direct_SetAccel(g_handle, m_axisnum, Convert.ToSingle(C_AxisAcc.Text));
}
(9)通過運動按鈕的事件處理函數來控制軸運動。
//持續正轉運動
private void C_Button_Fwd_Click(object sender, EventArgs e)
{
int ret = 0;
//更新軸參數
ret = zmcaux.ZAux_Direct_SetUnits(g_handle, m_axisnum, Convert.ToSingle(C_AxisUnits.Text));
ret = zmcaux.ZAux_Direct_SetSpeed(g_handle, m_axisnum, Convert.ToSingle(C_AxisSpeed.Text));
ret = zmcaux.ZAux_Direct_SetAccel(g_handle, m_axisnum, Convert.ToSingle(C_AxisAcc.Text));
//持續正方向運動
ret = zmcaux.ZAux_Direct_Single_Vmove(g_handle, m_axisnum, 1);
}
//反轉
private void C_Button_Rev_Click(object sender, EventArgs e)
{
//更新軸參數
int ret = 0;
ret = zmcaux.ZAux_Direct_SetUnits(g_handle, m_axisnum, Convert.ToSingle(C_AxisUnits.Text));
ret = zmcaux.ZAux_Direct_SetSpeed(g_handle, m_axisnum, Convert.ToSingle(C_AxisSpeed.Text));
ret = zmcaux.ZAux_Direct_SetAccel(g_handle, m_axisnum, Convert.ToSingle(C_AxisAcc.Text));
//持續負方向運動
ret = zmcaux.ZAux_Direct_Single_Vmove(g_handle, m_axisnum,-1);
}
(10)通過SDO讀寫按鈕的事件處理函數來讀寫驅動器的SDO參數。
private void C_Sdo_Read_Click(object sender, EventArgs e) //ETHERCAT讀取
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
return;
}
int ret = 0;
string str;
uint m_sdo_node2 = Convert.ToUInt32(C_SdoNode1.Text);
str = Convert.ToString(C_SdoReg1.Text);
uint m_sdo_index2 = uint.Parse(str, System.Globalization.NumberStyles.AllowHexSpecifier);
uint m_sdo_sub2 = Convert.ToUInt32(C_SdoIsub1.Text);
uint m_sdo_type2 = Convert.ToUInt32(C_SdoType1.SelectedIndex.ToString()) + 1;
int m_sdo_data2 = 0;
if (Bus_type == 0)
{
ret = zmcaux.ZAux_BusCmd_SDORead(g_handle, 0, m_sdo_node2, m_sdo_index2, m_sdo_sub2, m_sdo_type2, ref m_sdo_data2);
if (ret != 0)
{
MessageBox.Show("讀取失敗");
return;
}
C_Sdodata1.Text = m_sdo_data2.ToString();
}
else
{
MessageBox.Show("非ETHERCAT模塊");
return;
}
}
private void C_Sdo_Write_Click(object sender, EventArgs e) //ETHERCAT寫
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
return;
}
int ret = 0;
string str;
uint m_sdo_node1 = Convert.ToUInt32(C_SdoNode0.Text);
str = Convert.ToString(C_SdoReg0.Text);
uint m_sdo_index1 = uint.Parse(str, System.Globalization.NumberStyles.AllowHexSpecifier);
uint m_sdo_sub1 = Convert.ToUInt32(C_SdoIsub0.Text);
uint m_sdo_type1 = Convert.ToUInt32(C_SdoType0.SelectedIndex.ToString()) + 1;
int m_sdo_data1 = Convert.ToInt32(C_Sdodata0.Text);
if (Bus_type == 0)
{
ret = zmcaux.ZAux_BusCmd_SDOWrite(g_handle, 0, m_sdo_node1, m_sdo_index1, m_sdo_sub1, m_sdo_type1, m_sdo_data1);
if (ret != 0)
{
MessageBox.Show("寫入失敗");
return;
}
}
else
{
MessageBox.Show("非ETHERCAT模塊");
return;
}
}
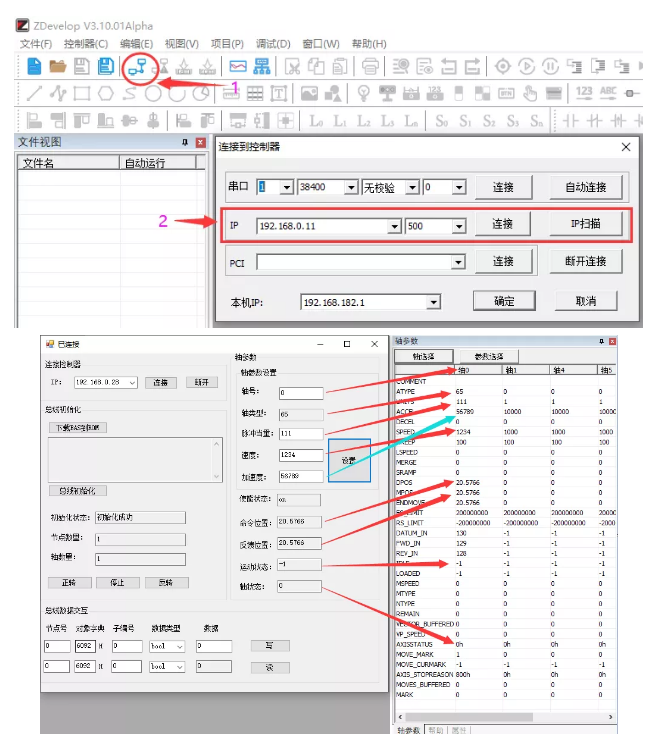
4.調試與監控
編譯運行例程,同時連接ZDevelop軟件進行調試,對運動控制的軸參數和運動情況進行監控。
(1)連接ZDevelop軟件,對軸參數和軸狀態進行監控。
(2)總線軸運動與軸參數設置演示
視頻鏈接:https://www.bilibili.com/video/BV1B64y1v7Sf/
本次,正運動技術EtherCAT運動控制卡的總線軸參數設置和軸運動,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師:400-089-8936。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
-
運動控制
+關注
關注
4文章
587瀏覽量
32977 -
運動控制卡
+關注
關注
7文章
114瀏覽量
15510 -
工控技術
+關注
關注
0文章
53瀏覽量
17554 -
正運動技術
+關注
關注
0文章
104瀏覽量
454
發布評論請先 登錄
相關推薦


PCIe EtherCAT實時運動控制卡PCIE464的IO與編碼器讀寫應用

EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十四)

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十三)





 工商網監
工商網監
評論