") KUKA8.3系統(tǒng)WorkVisual AddOnVKR控制心得
KUKA8.3系統(tǒng)WorkVisual AddOnVKR控制心得
虛擬外部軸高級版本
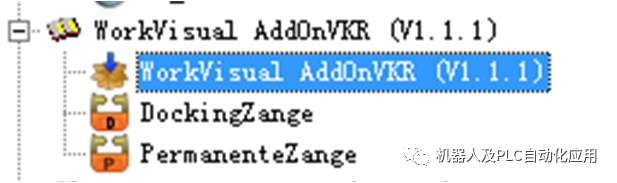
WorkVisualAddOnVKR 大眾公司專用版本軟件:
WorkVisualAddOnVKR是一個可后續(xù)加載的備選軟件包,用于配置焊鉗和線性滑軌。
WorkVisualAddOnVKR只賍用于通過軟件KUKA.WorkVisual配置焊鉗和線性滑軌。
在驅(qū)動裝置接口的輸入端和輸出端與現(xiàn)場總線設(shè)備映射時,必須注意以下幾點:
?僅支虛 PROFINET 或 Interbus類型的焊鉗,以進行自動映射。
?僅支虛 BOOL 或 BYTE 類型的分組,以進行映射。
?在 PLC配置窗口中(菜單序列 編輯器> 備選軟件包 >PLC 配置)映射模式 區(qū)段 必須是已進行了設(shè)置。
?輸入端:必須至少有 10 個字節(jié)連續(xù)映射。
?輸出端:在有 10 個字節(jié)連續(xù)映射時,字節(jié) 5 與字節(jié) 6 的映射必須隔開。
?輸出端:在有 10 個字節(jié)連續(xù)映射時,字節(jié) 5 與字節(jié) 6 的映射必須隔開。
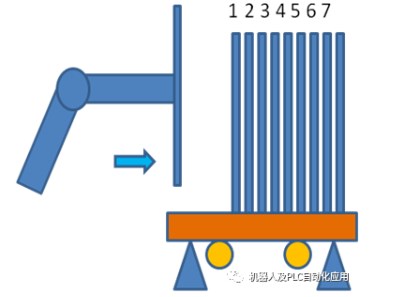
在配置時焊鉗與一個或多個驅(qū)動裝置接口連接。一個對接焊鉗最多可以與 7 個驅(qū)動裝置接口連接。一個固定焊鉗只能與一個驅(qū)動裝置接口連接。每個驅(qū)動裝置接口與一個現(xiàn)場總線設(shè)備連接。
操作步驟:
1.雙擊焊鉗。編輯器SynchroMove配置打開。
2.點擊焊鉗的連接點并按住鼠標鍵。
3.將鼠標指針拖到所需的驅(qū)動裝置接口上并松開鼠標鍵。焊鉗現(xiàn)在與驅(qū)動裝置接口連接。
-
plc
+關(guān)注
關(guān)注
5016文章
13387瀏覽量
465382 -
接口
+關(guān)注
關(guān)注
33文章
8691瀏覽量
151912 -
大眾
+關(guān)注
關(guān)注
1文章
789瀏覽量
34120 -
KUKA
+關(guān)注
關(guān)注
3文章
217瀏覽量
16604
原文標題:KUKA8.3系統(tǒng)WorkVisual AddOnVKR控制心得
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
KUKA庫卡機器人伺服驅(qū)動器相關(guān)型號舉例
西門子1500與KUKA工業(yè)機器人的Profinet通訊步驟
KUKA8.3系統(tǒng)WorkVisual AddOnVKR控制心得

WorkVisual中的安全配置
簡單介紹KUKA外部軸應(yīng)用

KUKA.Ethernet KRL.學習心得
如何創(chuàng)建WorkVisual項目
WorkVisual中的安全配置范圍包括哪些呢
WorkVisual將機器人控制系統(tǒng)配給實際應(yīng)用的機器人控制系統(tǒng)步驟
KST_WorkVisual-KUKA用KRC瀏覽器在線工作的方法
KUKA機器人系統(tǒng)變量$PRO_NAME所選程序的名稱(參考解釋器)
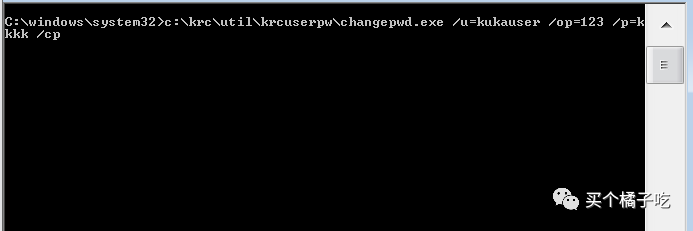
KUKA機器人密碼介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論