 4自由度并聯機器狗實現下蹲功能
4自由度并聯機器狗實現下蹲功能
1. 功能說明
本文示例將實現R328a樣機4自由度并聯機器狗下蹲的功能。

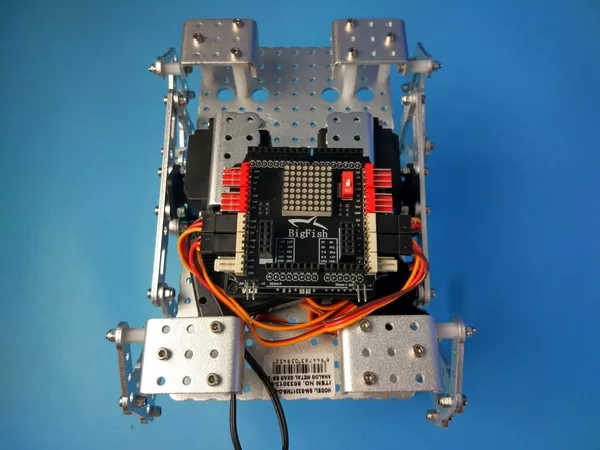
2. 結構說明
本樣機的并聯驅動結構與 【R082】4自由度并聯四足 類似,兩款樣機可以對比來看。
本樣機腿部的結構如下圖所示:驅動核心部分是兩個5桿結構的組合。
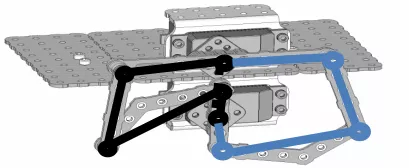 兩個五桿結構圖
兩個五桿結構圖驅動核心部分再搭配下圖的四桿結構,即可構成單側的腿。驅動核心部分再搭配下圖的四桿結構,即可構成單側的腿。
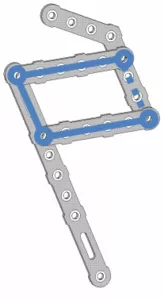 四桿結構
四桿結構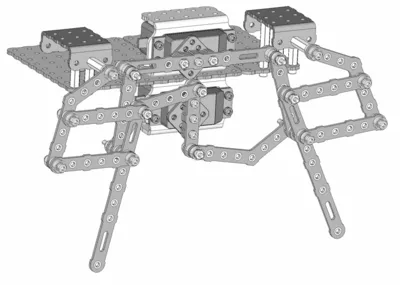 單側腿部圖
單側腿部圖 整機
整機3. 電子硬件
在這個示例中,我們采用了以下硬件,請大家參考:
|
主控板 |
|
|
擴展板 |
|
|
電池 |
7.4V鋰電池 |
電路連接:為了便于識別控制4自由度并聯機器狗,我們先規定好機器狗的前方以及舵機位置編號(如下圖所示):
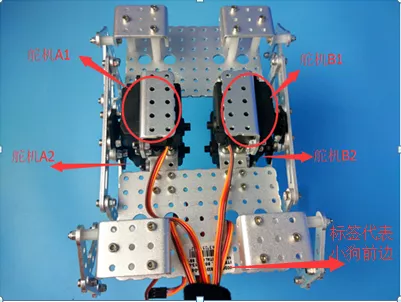
將舵機(A1、A2 、B1、B2)連接在Bigfish擴展板的D4、D7、D3、D8端口,如下圖所示:
4. 功能實現
上位機:Controller 1.0
下位機編程環境:Arduino 1.8.19
實現思路:實現4自由度并聯機器狗站立、前蹲、后蹲的動作。
4.1 調試舵機角度
利用上位機 Controller軟件調整4自由度并聯機器狗的舵機角度,記錄下機器狗站立、前蹲、后蹲時舵機的角度;然后利用Arduino IDE進行下位機編程,利用這些角度實現機器狗下蹲的功能。
對于如何利用Controller軟件進行調試機器狗的舵機角度,可參考【U002】如何驅動模擬舵機-Controller 1.0b軟件的使用 在本次實驗中,經過調試,對于4自由度并聯機器狗站立、前蹲、后蹲時的舵機角度值如下圖所示:
 機器狗站立時的舵機值
機器狗站立時的舵機值 機器狗前蹲時的舵機值
機器狗前蹲時的舵機值 機器狗后蹲時的舵機值
機器狗后蹲時的舵機值4.2 示例程序
下面提供一個4自由度并聯機器狗下蹲的參考例程(Dog_squat.ino),例程源代碼詳見 【https://www.robotway.com/h-col-237.html】 ,實驗效果可參考演示視頻。
/*------------------------------------------------------------------------------------
版權說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 機器譜 2023-05-26 https://www.robotway.com/
------------------------------*/
/*
本例程實現機器小狗站立、前蹲和后蹲
*/
#include
#define SERVO_SPEED 60 //定義舵機轉動快慢的時間
#define ACTION_DELAY 0 //定義所有舵機每個狀態時間間隔
Servo myServo[4];
int f = 15; //定義舵機每個狀態間轉動的次數,以此來確定每個舵機每次轉動的角度
int servo_port[4] = {3,4,7,8}; //定義舵機引腳
int servo_num = sizeof(servo_port) / sizeof(servo_port[0]); //定義舵機數量
float value_init[4] = {1513,1457,1074,1545}; //定義舵機初始角度
void setup() {
Serial.begin(9600);
for(int i=0;i
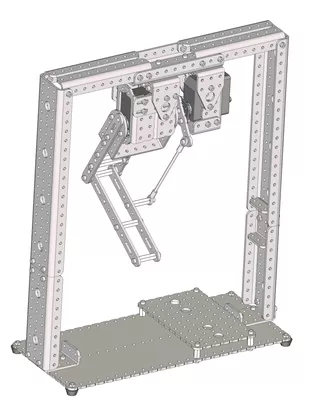
5. 擴展樣機
本樣機可以做出一些擴展,如下圖所示的在樣機上方增加平板,此樣機可用探索者零件或探索者兼容零件制作。

審核編輯黃宇
-
機器狗
+關注
關注
3文章
173瀏覽量
10193
發布評論請先 登錄
相關推薦
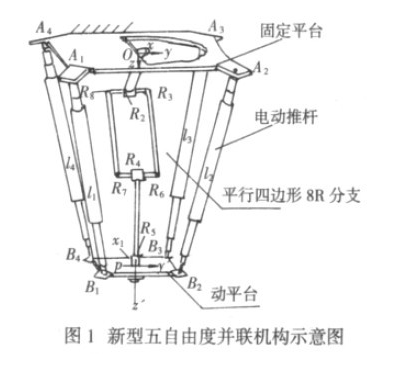
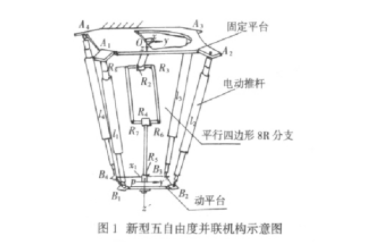
運用BLDC設計新型五自由度并聯機器人的方案分享
【案例分享】BLDC在新型五自由度并聯機器人中的應用
反螺旋理論與五自由度并聯機器人設計方法
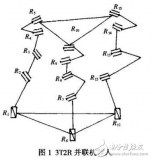
并聯機器人的少自由度并聯機構設計
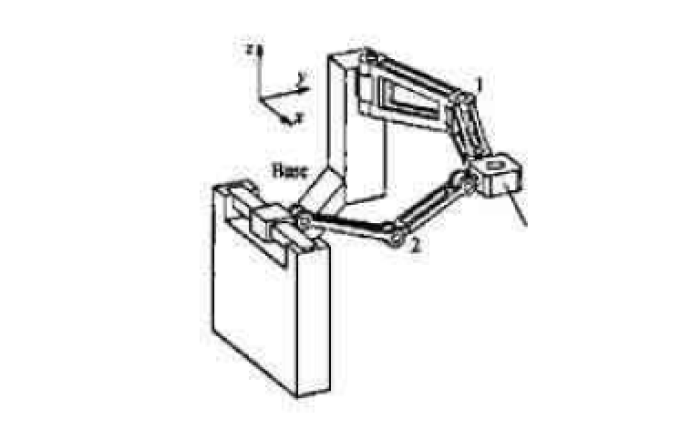
一種三自由度冗余驅動混聯機器人的設計
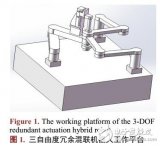
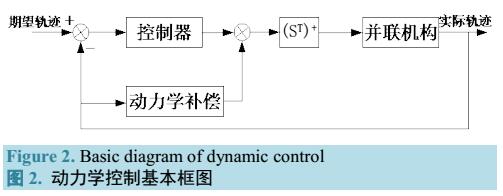
二自由度冗余驅動并聯機器人動態控制
運用BLDC對新型五自由度并聯機器人的設計
并聯機器人市場又情況如何市場活躍度最高的并聯機器人企業TOP5
如何分析新型二自由度平動并聯機器人的結構和運動學
關于BLDC 的新型五自由度并聯機器人運動控制







 工商網監
工商網監
評論