 鏡頭畸變是怎么產生的
鏡頭畸變是怎么產生的
1、問題背景 最近在做的項目有畸變校正的需求,但測試鏡頭畸變時,發現畸變的形態不太正常。如下圖所示中間向內凹、四周向外凸,感覺像是曲線型的。 但常見的畸變就兩種,一種是向內收的枕形畸變,另一種是向外凸的桶形畸變,所以本篇文章主要是對這個問題做一個分析, 以及總結一下什么是畸變、畸變是怎么產生的、畸變的計算。 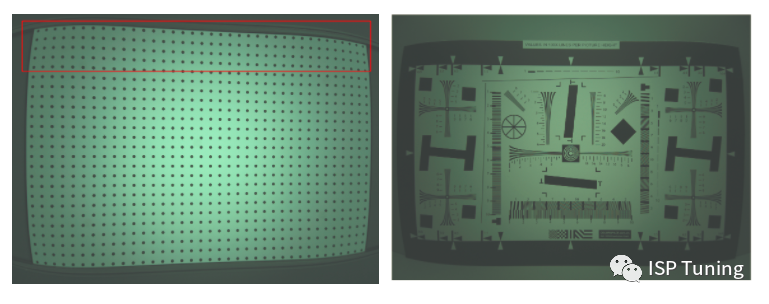 ? 2、問題分析 關于畸變,是屬于像差的一種,肯定是和鏡頭相關的。遇到我上面的問題具體該怎么處理呢? 最簡單的方法就是對著圖卡(一般是點陣圖/棋盤格)去拍 raw 圖,將有問題現象的 raw 圖反饋給鏡頭廠去確認。 一開始我是給的上面點陣圖的那張 raw,他們反饋看現象是不太正常,但說我拍歪了,讓再擺正重新拍一張。 隨即又拍了張擺正的解析力卡的 raw 給他們,因為是確認邊緣直線變曲線的問題,所以用其他圖卡能復現現象也行。 如下是這顆模組的規格,反饋說是這顆鏡頭的視場角是120度,屬于廣角鏡頭,只要畸變<10.5%就是正常的, ? 確實短焦距的廣角鏡頭是會容易出現明顯的桶形畸變,但目前看到的這種曲線的畸變,就不太確定是什么了。 ?
? 2、問題分析 關于畸變,是屬于像差的一種,肯定是和鏡頭相關的。遇到我上面的問題具體該怎么處理呢? 最簡單的方法就是對著圖卡(一般是點陣圖/棋盤格)去拍 raw 圖,將有問題現象的 raw 圖反饋給鏡頭廠去確認。 一開始我是給的上面點陣圖的那張 raw,他們反饋看現象是不太正常,但說我拍歪了,讓再擺正重新拍一張。 隨即又拍了張擺正的解析力卡的 raw 給他們,因為是確認邊緣直線變曲線的問題,所以用其他圖卡能復現現象也行。 如下是這顆模組的規格,反饋說是這顆鏡頭的視場角是120度,屬于廣角鏡頭,只要畸變<10.5%就是正常的, ? 確實短焦距的廣角鏡頭是會容易出現明顯的桶形畸變,但目前看到的這種曲線的畸變,就不太確定是什么了。 ? 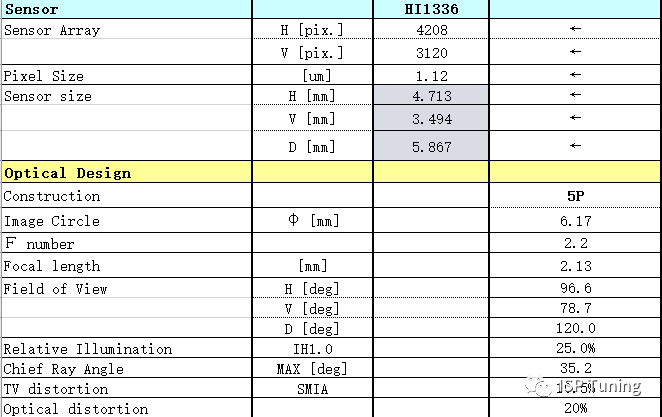 ? ? 鏡頭廠那邊實測,模擬給出的結論就是桶形畸變,也是滿足鏡頭的設計要求的。并做了如下解釋,如下圖所示是反映鏡頭畸變的曲線圖、網格圖。 ? 從畸變曲線看,是單調遞增的,且是負值,所以是單純的桶形畸變。 ? 曲線圖上,在 2.2mm像高內,畸變都比較小,2.2mm 開始,畸變就變的比較大,應該是內視場畸變和外視場畸變差異過大導致的視差。 ?
? ? 鏡頭廠那邊實測,模擬給出的結論就是桶形畸變,也是滿足鏡頭的設計要求的。并做了如下解釋,如下圖所示是反映鏡頭畸變的曲線圖、網格圖。 ? 從畸變曲線看,是單調遞增的,且是負值,所以是單純的桶形畸變。 ? 曲線圖上,在 2.2mm像高內,畸變都比較小,2.2mm 開始,畸變就變的比較大,應該是內視場畸變和外視場畸變差異過大導致的視差。 ? 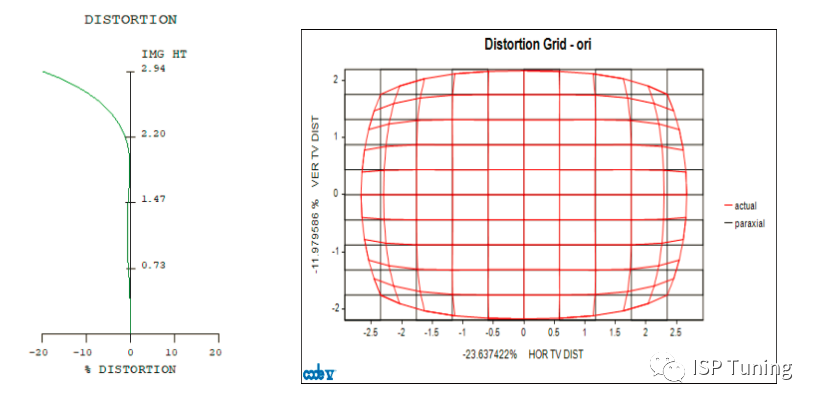 ? 我的理解是類似于在一個一圈一圈的圓環里面畫直線,會感覺直線變形了一樣。 如上網格圖也是一樣,內視場的畸變很小,而到邊角部分的畸變明顯變大所以視覺上就感覺中間不直了一樣。 ? 3、知識延申:關于畸變的相關概念 a、什么是畸變 畸變是指物體所成的像在形狀上的變形,它并不會影響像的清晰度,而只影響像與物的相似性。 如下示意圖所示,常見的畸變類型有桶形畸變和枕形畸變。
? 我的理解是類似于在一個一圈一圈的圓環里面畫直線,會感覺直線變形了一樣。 如上網格圖也是一樣,內視場的畸變很小,而到邊角部分的畸變明顯變大所以視覺上就感覺中間不直了一樣。 ? 3、知識延申:關于畸變的相關概念 a、什么是畸變 畸變是指物體所成的像在形狀上的變形,它并不會影響像的清晰度,而只影響像與物的相似性。 如下示意圖所示,常見的畸變類型有桶形畸變和枕形畸變。 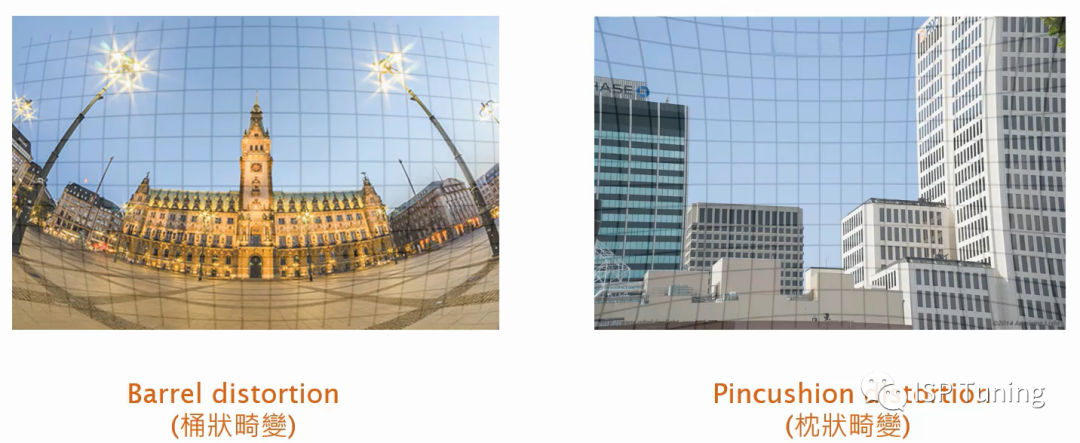 ? 那什么時候是桶形畸變,什么時候又是枕形畸變呢? ? 以如下簡單的示意圖為例,將靠近鏡頭中心部分所成的像視為內視場(y1),邊緣部分為外視場(y2)。 ? 當內視場的放大倍率 :y1/h1 > 外視場的放大倍率:y2/h2時,所成的像是從中心是往外放大的,也就是桶形畸變。反之則是枕形畸變。
? 那什么時候是桶形畸變,什么時候又是枕形畸變呢? ? 以如下簡單的示意圖為例,將靠近鏡頭中心部分所成的像視為內視場(y1),邊緣部分為外視場(y2)。 ? 當內視場的放大倍率 :y1/h1 > 外視場的放大倍率:y2/h2時,所成的像是從中心是往外放大的,也就是桶形畸變。反之則是枕形畸變。 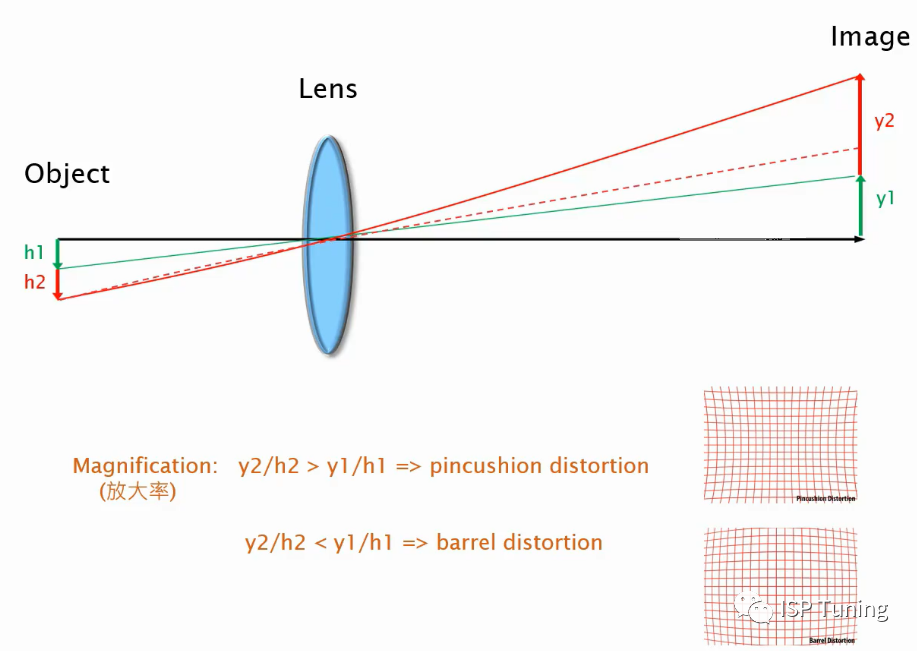 ? 而具體出現桶形畸變還是枕形畸變,取決于光圈的位置,當光圈在透鏡前面或后面時,會限制光線的行為。 ? 當光圈在鏡頭前面,像的高度減小了,也就是像縮小了,就造成了桶形失真。復雜的鏡頭,例如后焦距廣角鏡頭,往往就會出現桶形失真,因為前組鏡頭會充當后組的光圈。 ? 當光圈在鏡頭后面,像的高度增加了,也就是放大了,就是枕形失真。遠焦鏡頭的后組為負,會導致枕形失真。 ? 下面這幅圖片是對應的三維圖,更加清晰的看出光圈與鏡頭的關系。
? 而具體出現桶形畸變還是枕形畸變,取決于光圈的位置,當光圈在透鏡前面或后面時,會限制光線的行為。 ? 當光圈在鏡頭前面,像的高度減小了,也就是像縮小了,就造成了桶形失真。復雜的鏡頭,例如后焦距廣角鏡頭,往往就會出現桶形失真,因為前組鏡頭會充當后組的光圈。 ? 當光圈在鏡頭后面,像的高度增加了,也就是放大了,就是枕形失真。遠焦鏡頭的后組為負,會導致枕形失真。 ? 下面這幅圖片是對應的三維圖,更加清晰的看出光圈與鏡頭的關系。 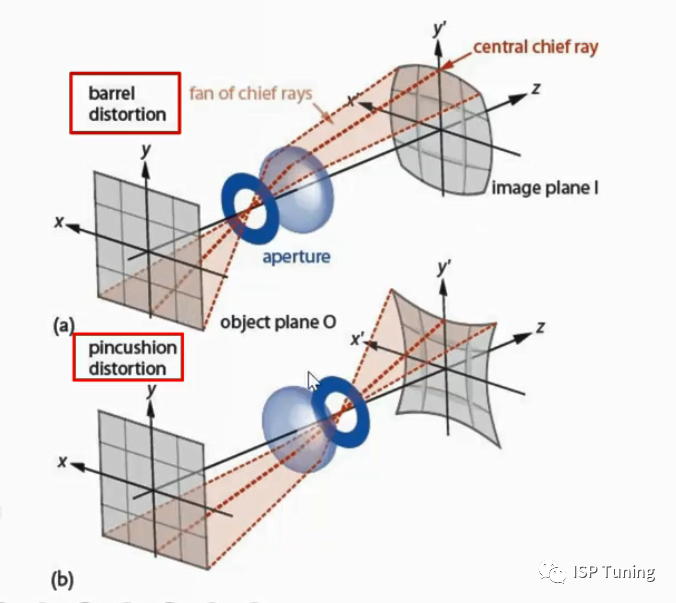 ? b、畸變產生的原因 從上面的概念我們了解到,畸變產生的根本原因是鏡頭像場中央區的放大倍率和邊緣區的放大倍率不一致導致,那為什么不一致呢? ?
? b、畸變產生的原因 從上面的概念我們了解到,畸變產生的根本原因是鏡頭像場中央區的放大倍率和邊緣區的放大倍率不一致導致,那為什么不一致呢? ? 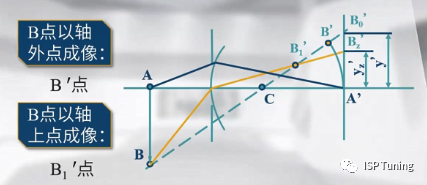 ? 請看如上這個光路圖,A 和 B一個是軸上點,一個是軸外點。過 B 點作輔助光軸,也就是這個虛線,與像面交于 B0′,B0′點即為 B點的理想像點。 ? 另一方面,B點若是以細光束成像,則像點是B′點,注意,細光束成像是沒有球差和慧差的,但是有場曲,所以B在細光束下成像像點實際在B', B′B0′為B點的場曲。 ? 當B點以主光線成像時,看黃色主光線,這時注意,主光線是寬光束,存在球差和慧差,所以寬光束成像時,黃色主光線交輔軸于B1′點,所以B1′B′為B點的球差。 ? 所以,綜合球差慧差場曲的影響,主光線最終經B1′點交像面于Bz′點,那實際像點Bz’就偏離了理想像點B0′。 ? 再看看位于光軸上的A點,主光線與光軸重合,主光線的像點與理想像點在像面的中心點A′重合,因此軸上點成像沒有偏差,但是軸外點的像高和理想像高有差異,造成中心和邊緣的放大倍率不同,這就產生了畸變。 ? 所以,由以上分析可以看出,畸變的形成既有場曲的因素也有球差的因素。 ? 注: 篇幅有限,這里就不再解釋關于球差,慧差,場曲的概念了,后續文章會再單獨描述; ? c、關于畸變的計算 再回到上面鏡頭的spec,描述了鏡頭的 TV 畸變是10.5%,光學畸變是20%,那這兩者的區別是什么,具體是如何計算的?
? 請看如上這個光路圖,A 和 B一個是軸上點,一個是軸外點。過 B 點作輔助光軸,也就是這個虛線,與像面交于 B0′,B0′點即為 B點的理想像點。 ? 另一方面,B點若是以細光束成像,則像點是B′點,注意,細光束成像是沒有球差和慧差的,但是有場曲,所以B在細光束下成像像點實際在B', B′B0′為B點的場曲。 ? 當B點以主光線成像時,看黃色主光線,這時注意,主光線是寬光束,存在球差和慧差,所以寬光束成像時,黃色主光線交輔軸于B1′點,所以B1′B′為B點的球差。 ? 所以,綜合球差慧差場曲的影響,主光線最終經B1′點交像面于Bz′點,那實際像點Bz’就偏離了理想像點B0′。 ? 再看看位于光軸上的A點,主光線與光軸重合,主光線的像點與理想像點在像面的中心點A′重合,因此軸上點成像沒有偏差,但是軸外點的像高和理想像高有差異,造成中心和邊緣的放大倍率不同,這就產生了畸變。 ? 所以,由以上分析可以看出,畸變的形成既有場曲的因素也有球差的因素。 ? 注: 篇幅有限,這里就不再解釋關于球差,慧差,場曲的概念了,后續文章會再單獨描述; ? c、關于畸變的計算 再回到上面鏡頭的spec,描述了鏡頭的 TV 畸變是10.5%,光學畸變是20%,那這兩者的區別是什么,具體是如何計算的?  ? 1)、關于光學畸變: 光學畸變是對應鏡頭的指標,描述的是物體所成像的理想位置和實際位置的偏差,如下光路圖中的軸外一點B,實際像點Bz',理想像點為B0′。 ? 可以用理想像高y’,和實際像高 yz’ 的比值來描述偏離程度, 公式為:( yz'-y' ) / y' x 100%; ? ? 可以用此項目中的鏡頭規格來做具體的驗證,鏡頭的光學畸變是隨視場范圍變化而變化的,規格書給出的20%是最大的光學畸變值, ? 所以我們要計算出最大的理想像高,也就是計算當是最大視場范圍時成像時的理想像高是多少。 ?
? 1)、關于光學畸變: 光學畸變是對應鏡頭的指標,描述的是物體所成像的理想位置和實際位置的偏差,如下光路圖中的軸外一點B,實際像點Bz',理想像點為B0′。 ? 可以用理想像高y’,和實際像高 yz’ 的比值來描述偏離程度, 公式為:( yz'-y' ) / y' x 100%; ? ? 可以用此項目中的鏡頭規格來做具體的驗證,鏡頭的光學畸變是隨視場范圍變化而變化的,規格書給出的20%是最大的光學畸變值, ? 所以我們要計算出最大的理想像高,也就是計算當是最大視場范圍時成像時的理想像高是多少。 ? 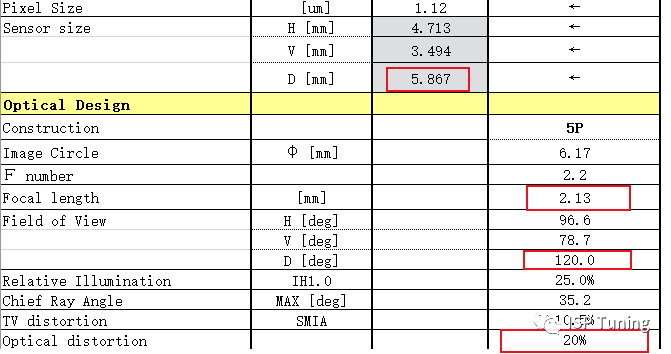 ? 最大的視場角如上規格書,對角線方向的 FOV 值為120° (如下圖 ? = 60° ),焦距 f 是2.13mm,理想像高為:tan 60° x 2.13 = 3.689mm; ? 而最大實際像高就是 sensor 對角線長的一半:5.867 / 2 = 2.934mm; 則鏡頭最大光學畸變為:(2.934-3.689)/ 3.689 x 100% = - 20% ;
? 最大的視場角如上規格書,對角線方向的 FOV 值為120° (如下圖 ? = 60° ),焦距 f 是2.13mm,理想像高為:tan 60° x 2.13 = 3.689mm; ? 而最大實際像高就是 sensor 對角線長的一半:5.867 / 2 = 2.934mm; 則鏡頭最大光學畸變為:(2.934-3.689)/ 3.689 x 100% = - 20% ; 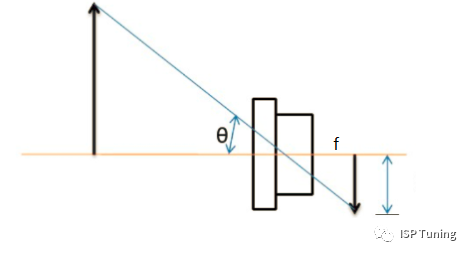 2)、關于 TV 畸變: TV畸變是對應所拍攝出的圖片而言的,體現圖像的變形程度,我們平常用 imatest 軟件所測試的就是TV畸變的值。? ? TV 是 Transverse Vertical,橫向豎向的意思。 ? 關于TV畸變的計算它有SMIA 和 Traditional TV distortion 兩種,如下示意圖所示:
2)、關于 TV 畸變: TV畸變是對應所拍攝出的圖片而言的,體現圖像的變形程度,我們平常用 imatest 軟件所測試的就是TV畸變的值。? ? TV 是 Transverse Vertical,橫向豎向的意思。 ? 關于TV畸變的計算它有SMIA 和 Traditional TV distortion 兩種,如下示意圖所示: 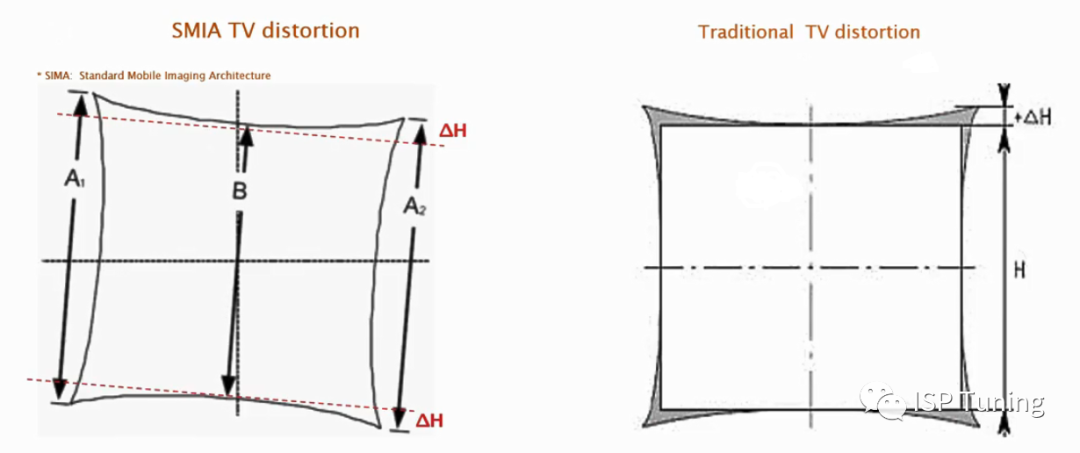 SMIA TV Distortion = 100% * ( A-B )/B ;A = ( A1+A2 )/2 Traditional TV distortion = 100% * ?H/H ? 如上?SMIA TV Distortion 計算中,A =?( A1+A2 )/2 =?H+2?H,B = H,則 100% *(A-B)/B = 2?H/H,所以 SMIA TV Distortion = 2x Traditional TV distortion。 ? 還是以此項目中用到的鏡頭來做具體的驗證,規格書中給出的TV 畸變值是10.5%,且是SMIA TV 畸變; ?
SMIA TV Distortion = 100% * ( A-B )/B ;A = ( A1+A2 )/2 Traditional TV distortion = 100% * ?H/H ? 如上?SMIA TV Distortion 計算中,A =?( A1+A2 )/2 =?H+2?H,B = H,則 100% *(A-B)/B = 2?H/H,所以 SMIA TV Distortion = 2x Traditional TV distortion。 ? 還是以此項目中用到的鏡頭來做具體的驗證,規格書中給出的TV 畸變值是10.5%,且是SMIA TV 畸變; ?  ? 如下是實拍的棋盤格的圖,用來計算 SMIA TV畸變,拍兩條橫向直線,讓他們與圖像的上下邊相切。 ?
? 如下是實拍的棋盤格的圖,用來計算 SMIA TV畸變,拍兩條橫向直線,讓他們與圖像的上下邊相切。 ? 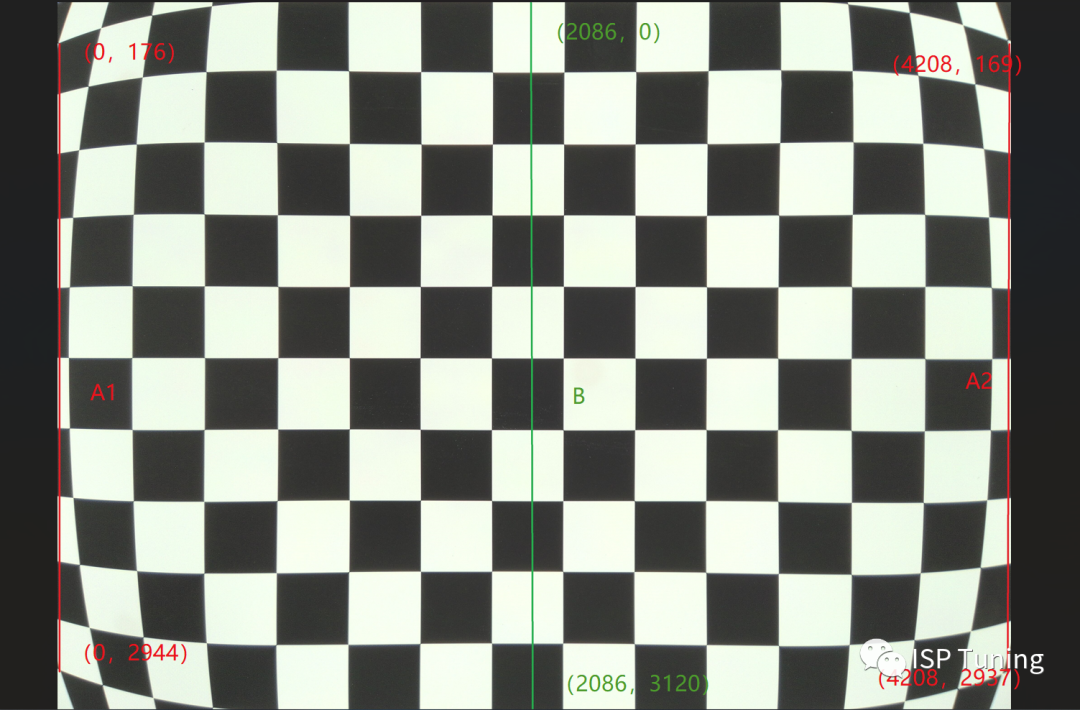 ? 兩條直線與圖像左側相交,得到兩個坐標,計算出縱向像素差A1。同樣的方法可以得到右側的縱向像素差A2。兩條直線間的距離就是圖像的高B,畸變值就是((A1+A2)/2 - B)/B。 ? 用畫圖工具打開后,就可以得到每個點的像素位置,如下圖的坐標所示,先算出左側的像素差(2944-176=2768),右側的像素差(2937-169=2768),中間的像素差為3120, ? 可以計算出畸變值為:((2768+2768)/2 - 3120)/3120 = -11.2%),結果有點誤差,但也不大,實際測試一般都是用 imatest 軟件去計算,能了解一下具體是怎么計算的就可以了。??
? 兩條直線與圖像左側相交,得到兩個坐標,計算出縱向像素差A1。同樣的方法可以得到右側的縱向像素差A2。兩條直線間的距離就是圖像的高B,畸變值就是((A1+A2)/2 - B)/B。 ? 用畫圖工具打開后,就可以得到每個點的像素位置,如下圖的坐標所示,先算出左側的像素差(2944-176=2768),右側的像素差(2937-169=2768),中間的像素差為3120, ? 可以計算出畸變值為:((2768+2768)/2 - 3120)/3120 = -11.2%),結果有點誤差,但也不大,實際測試一般都是用 imatest 軟件去計算,能了解一下具體是怎么計算的就可以了。??
責任編輯:彭菁
-
模擬
+關注
關注
7文章
1429瀏覽量
83988 -
鏡頭
+關注
關注
2文章
511瀏覽量
25716 -
線型
+關注
關注
0文章
5瀏覽量
6582
原文標題:關于鏡頭畸變問題的總結
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
VirtualLab Fusion應用:畸變分析儀

基于除法畸變模型的鏡頭線性標定方法
Blackfin-Download生產碼的空間變換和鏡頭畸變校正(STLDC)

一種廣角鏡頭成像幾何畸變校正算法實現
halcon單相機標定和畸變矯正程序

諧波畸變率計算公式解析






 工商網監
工商網監
評論