 鎖相環(PLL)電路設計及仿真分析
鎖相環(PLL)電路設計及仿真分析
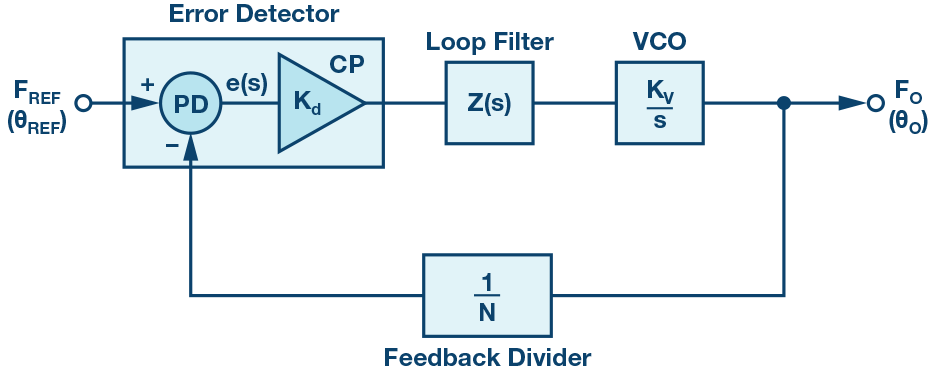
本文以SoC中的PLL為例,對PLL電路進行設計和仿真。
首先回顧一下核心參數:
| 參數 | 選定值 |
|---|---|
| 參考時鐘頻率FIN | 26MHz |
| 輸出時鐘頻率FOUT | 104MHz~2.002GHz |
| 環路分頻比N | 4~77 |
| 電荷泵電流Icp | 2uA |
| 壓控振蕩器的增益Kvco | 4GHz/V |
| 環路濾波器階數 | 二階 |
| 環路帶寬BW | 500KHz |
| 環路相位裕度PM | 50° |
| R1 | 6.87kΩ |
| C1 | 55pF |
| C2 | 5.5pF |
設計指標:
| 參數 | 示例 |
|---|---|
| 參考時鐘頻率 | 13MHz~76.8MHz |
| 輸出時鐘頻率 | 100MHz~2GHz |
| 鎖定時間 | <100uS |
| Period Jitter RMS | <2ps |
| 輸出時鐘duty cycle | 40%~60% |
| 功耗 | <5mA |
| 輸出時鐘頻率精度 | <±300ppm |
下面對子模塊進行設計
1)鑒頻鑒相器(PFD)
本文選擇DFF based PFD,其電路結構如下
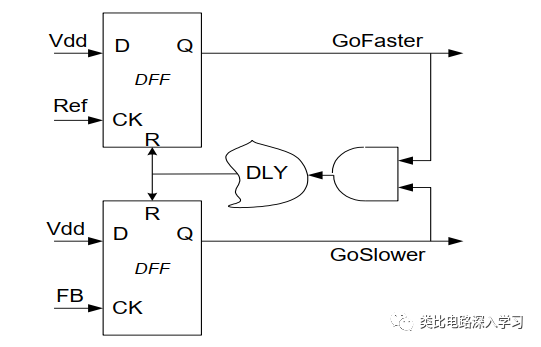
+
這里需要注意的就是dead zone,即死區時間。
假定不加入圖中的DLY模塊,當Ref和FB rising edge很接近,受限于電路的速度,GoFaster/GoSlower可能會是很窄的脈沖,那么charge pump將不能打開。從傳輸函數上看,當相位誤差為0附近的這段區域,PFD+CP的增益將會變小甚至是0,導致傳輸函數出現非線性,從而jitter變大。
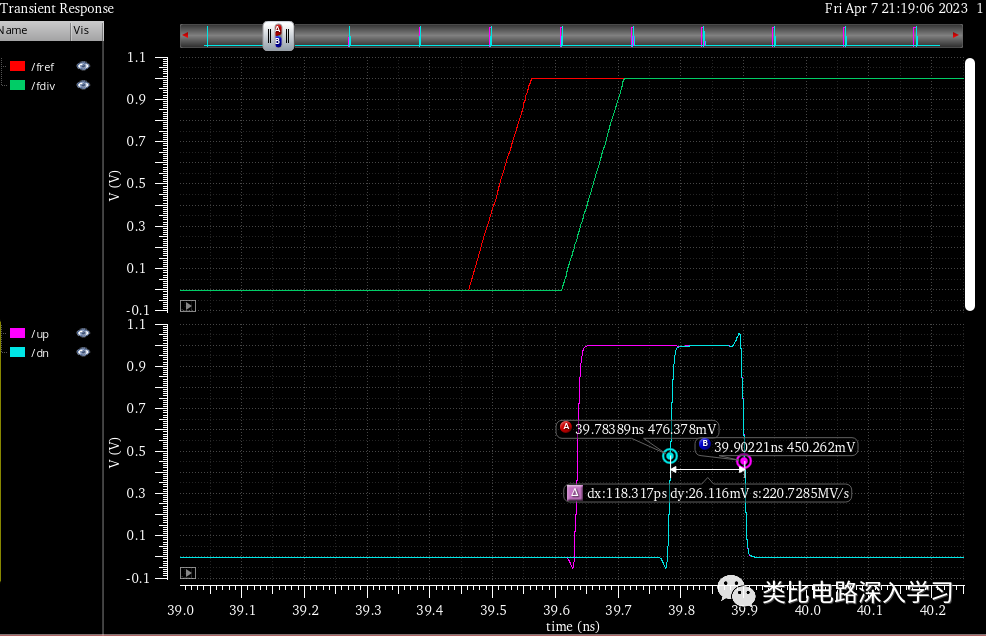
因為我們需要設計一定的死區時間,假定120ps,仿真看下PFD的行為如下
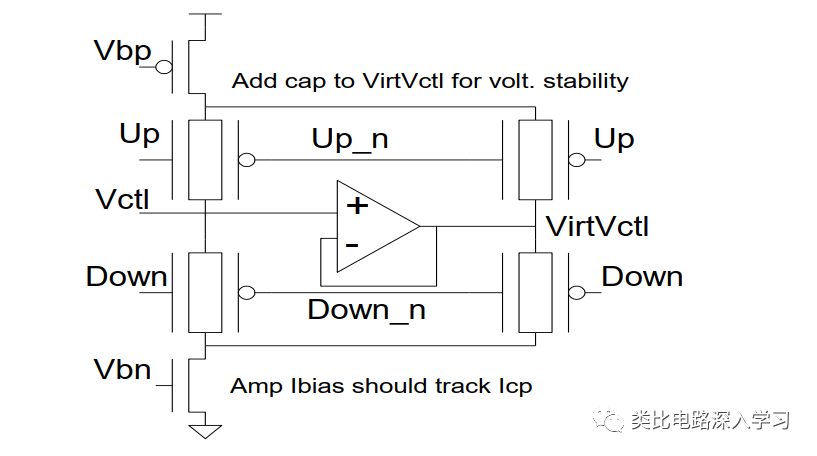
2)電荷泵(charge pump)
本文選擇Young提出的經典結構,由于virtual vctl的引入,有效的對抗了時鐘饋通和電荷注入,保證了CP具備良好的線性度。其電路結構如下
電荷泵的電流為2uA,PFD+CP聯合仿真瞬態結果如下
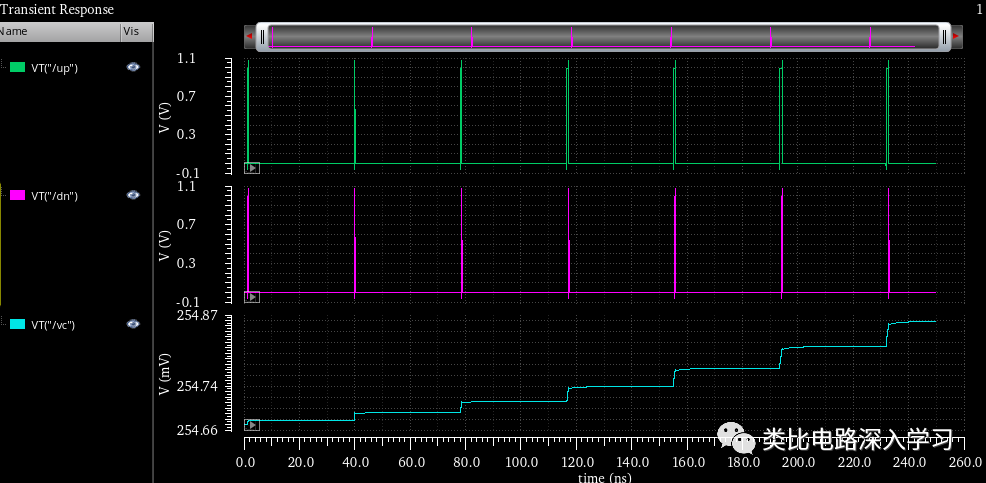
如果是RF或者ADC應用,那么需要對CP的結構、電流、Noise進行優化。本文是SoC應用,所以CP的noise并不重要,這里只要保證基本的功能、良好的線性度即可。
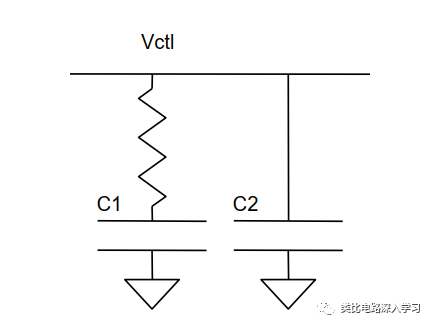
3)環路濾波器(LPF)
目前主流的環路濾波器結構為雙CP、gm-C filter結構,可以有效的減小面積、提高CP線性度、降低電阻噪聲。
針對SoC應用,為降低設計復雜度,本文采用了連續時間、無源環路濾波器結構,即僅R和C構成,如下圖所示
4)壓控振蕩器(VCO)
本文采用V2I+ICO(Ring)結構的壓控振蕩器,環形振蕩器采用三級反相器實現。如下圖所示,
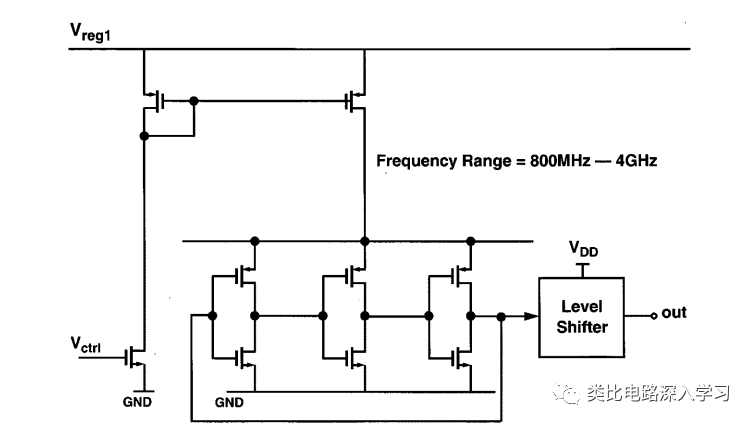
charge pump的電壓為1V,為保證up和dn電流線性度,vctrl電壓范圍設定為0.2V~0.8V,這樣Corner下需要保證振蕩器最高振蕩頻率>2GHz
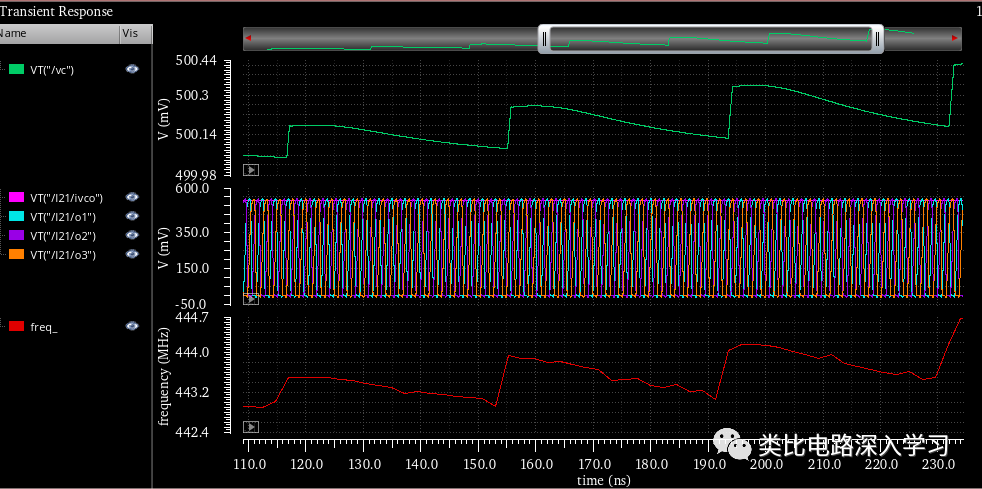
Kvco~=4.1GHz/V
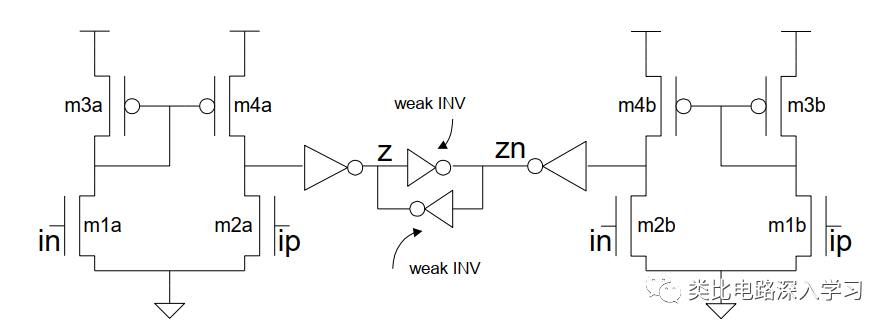
5)電平轉換器(level shift)
VCO電平轉換器,一般有dc和ac兩種結構,本文采用dc結構,示意圖如下
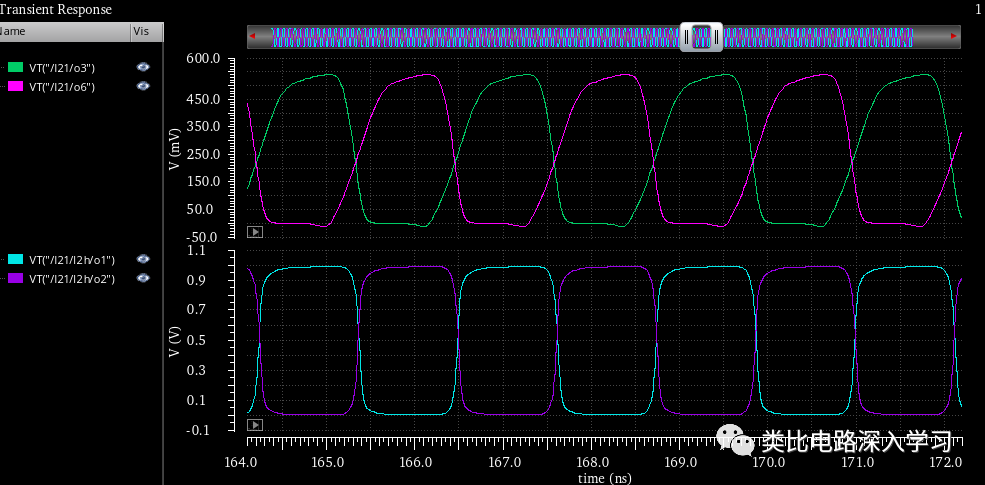
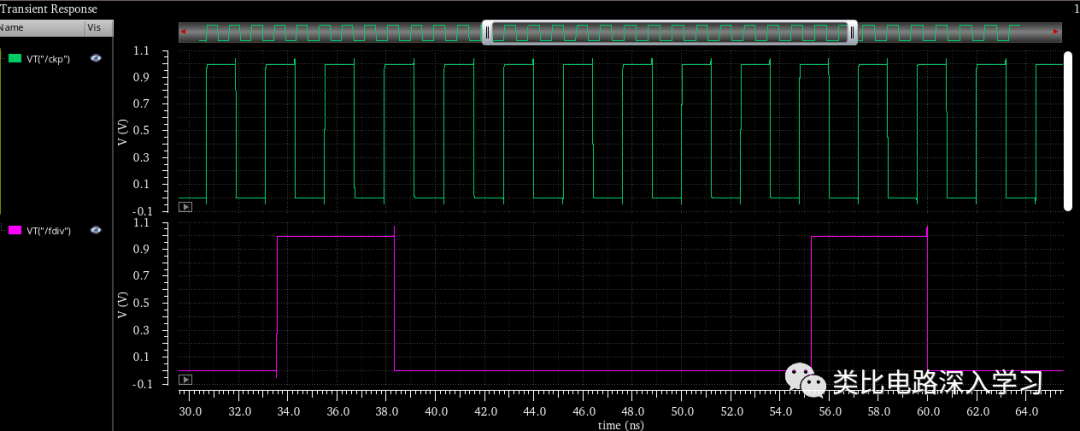
6)環路分頻器(loop divier)
支持4~77連續分頻,本文采用 2/3 Prescaler+N-divider結構
采用Prescaler目的是為了降低N-divider的速度要求,timing更好實現。
配置N_div=9,仿真波形如下:
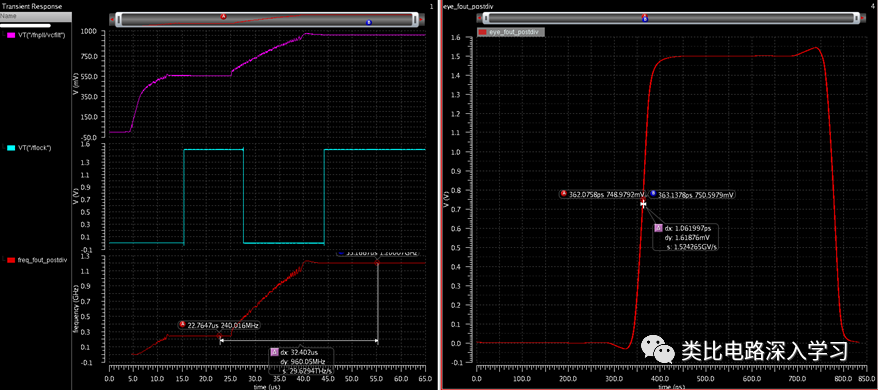
7)鎖相環頂層(PLL)
配置240M/1.2G,Top仿真結果如下
-
鎖相環
+關注
關注
35文章
590瀏覽量
87898 -
電路設計
+關注
關注
6677文章
2465瀏覽量
205349 -
soc
+關注
關注
38文章
4204瀏覽量
219112 -
pll
+關注
關注
6文章
781瀏覽量
135333 -
仿真分析
+關注
關注
3文章
105瀏覽量
33700
發布評論請先 登錄
相關推薦
鎖相環設計仿真與應用

鎖相環(PLL)的工作原理及應用
鎖相環PLL的基礎知識





 工商網監
工商網監
評論