") KUKA系統變量:$IOBUS_INFO[]讀取是否出現總線故障
KUKA系統變量:$IOBUS_INFO[]讀取是否出現總線故障
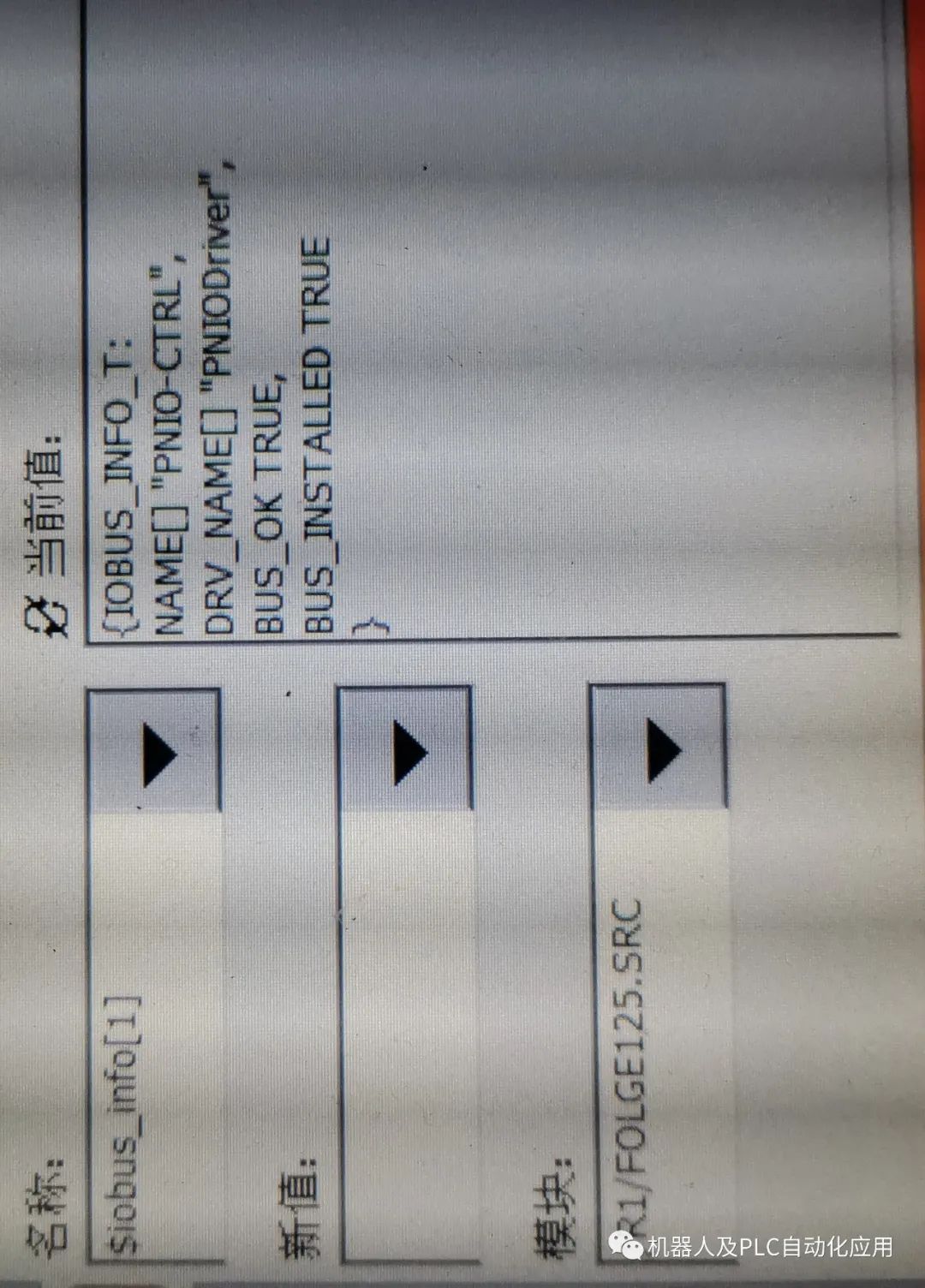
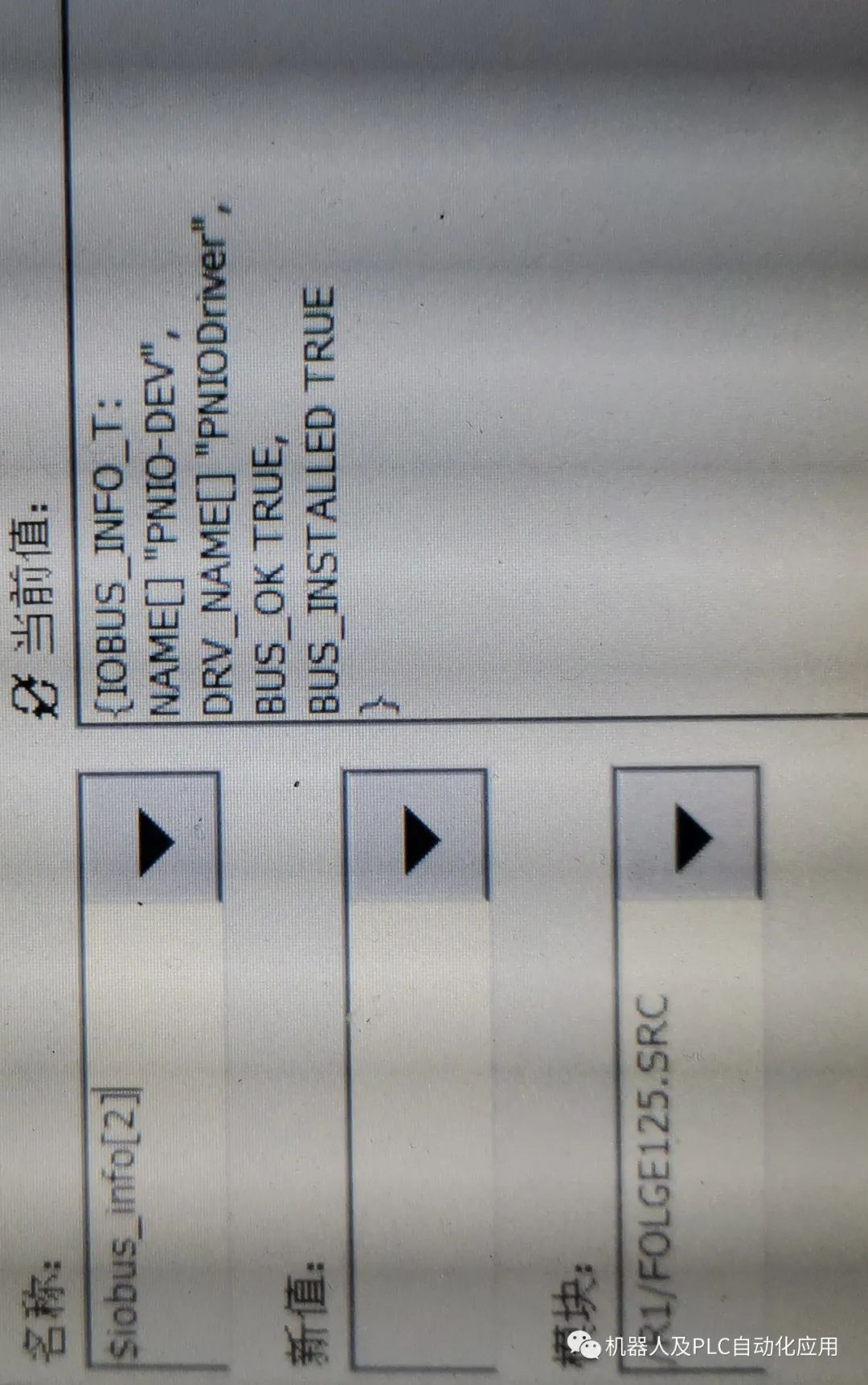
$IOBUS_INFO[]
具有有關總線驅動程序信息的結構
$IOBUS_INFO[Index ]=Information
Index: 網絡號,序列號會自動分配給總線驅動程序。
Information: 類型: Iobus_Info_T, 列出有關總線驅動程序的信息
STRUC Iobus_Info_T CHAR name[256], drv_name[256], BOOL bus_ok, bus_installed
name[] : 總線實例的名稱,例如 SYS-X44
drv_name[] : 總線驅動程序的名稱,例如 ECat.DRV
bus_ok: TRUE:總線驅動程序正常。
FALSE:總線驅動程序有故障或不兼容。
bus_installed: TRUE:已安裝總線驅動程序。
FALSE:未安裝總線驅動程序。
激活 / 停用總線故障
借助 IOCTL 函數可停用并再次激活總線故障。在默認情況下激活總線故障。如果出現總線故障,這會導致停止和 / 或鎖定激活命令。
可為一個或多個總線實例停用總線故障。如果總線故障被停用,會有如下表現:
? 總線故障:不停止和 / 或鎖定激活命令
? 總線故障:smartHMI 信息窗口中沒有故障信息
? smartHMI 信息窗口中會顯示以下信息:
KRC IO 總線錯誤抑制針對下列總線實例激活:{ 總線實例 }{ 總線實例 }{總線實例 }
? 如果總線實例中已出現故障,則無法再次激活總線故障。
該情況下可通過系統變量 $IOBUS_INFO[] 讀取是否出現總線故障。
激活和停用可以通過 HMI 或 KRL 執(zhí)行。
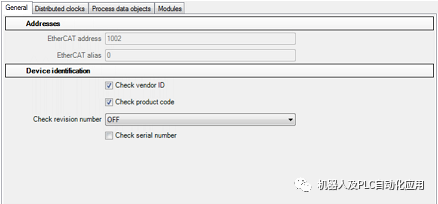
EtherCAT 地址: 自動分配 EtherCAT 地址。該地址可在拓撲編輯器中更改。
EtherCAT Alias: 可脫開設備的 Alias 地址,例如 EMD在運行期間耦合或解耦可脫開設備時,需要該 Alias 地址。
檢查制造商識別號:
? 勾選: 啟動設備時檢查制造商 ID。
? 未勾選: 不檢查制造商 ID。
檢驗產品號;
勾選:啟動設備時檢查產品編號。
未勾選:不檢查產品編號。
檢查審核編號:
檢查設備版本號的方法。可選的版本號取決于設備。
? OFF: 不檢查版本號。
? EQ: 檢查版本號是否一致。
? LW_EQ : 檢查版本號的 16 低位字元是否一致。
從設備說明文件中讀取默認設置。
檢查系列號;
勾選:啟動設備時檢查序列號。
? 未勾選: 不檢查序列號。
審核編輯:劉清
-
HMI
+關注
關注
9文章
597瀏覽量
48735 -
DRV
+關注
關注
0文章
18瀏覽量
20688 -
KUKA機器人
+關注
關注
4文章
143瀏覽量
9180
原文標題:KUKA 系統變量:$IOBUS_INFO[]讀取是否出現總線故障
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
KUKA焊接機器人伺服電機常見故障及維修處理
探究$err 故障變量的用法
探究IOBUS_INFO[]讀取是否會出現總線故障
![探究<b class='flag-5'>IOBUS_INFO</b>[]<b class='flag-5'>讀取</b><b class='flag-5'>是否</b>會<b class='flag-5'>出現</b><b class='flag-5'>總線</b><b class='flag-5'>故障</b>](https://file.elecfans.com/web1/M00/EE/6A/pIYBAGCWBbyAX-AwAAAYSRZEjrw906.png)
![$<b class='flag-5'>IOBUS_INFO</b>[]<b class='flag-5'>讀取</b><b class='flag-5'>是否</b><b class='flag-5'>出現</b><b class='flag-5'>總線</b><b class='flag-5'>故障</b>](https://file1.elecfans.com/web2/M00/88/AD/wKgaomRvBpGAIymvAAAYSRZEjrw131.png)





 工商網監(jiān)
工商網監(jiān)
評論