 ROS機器人操作系統的實現原理(上)
ROS機器人操作系統的實現原理(上)
本文介紹ROS機器人操作系統(Robot Operating System)的實現原理,從最底層分析ROS代碼是如何實現的。
1、序列化
把通信的內容(也就是消息message)序列化是通信的基礎,所以我們先研究序列化。
盡管筆者從事機器人學習和研發很長時間了,但是在研究ROS的過程中,“序列化”這個詞還是這輩子第一次聽到。
所以可想而知很多人在看到“把一個消息序列化”這樣的描述時是如何一臉懵逼。
但其實序列化是一個比較常見的概念,你雖然不知道它但一定接觸過它。
下面我們先介紹“序列化”的一些常識,然后解釋ROS里的序列化是怎么做的?
1.1什么是序列化?
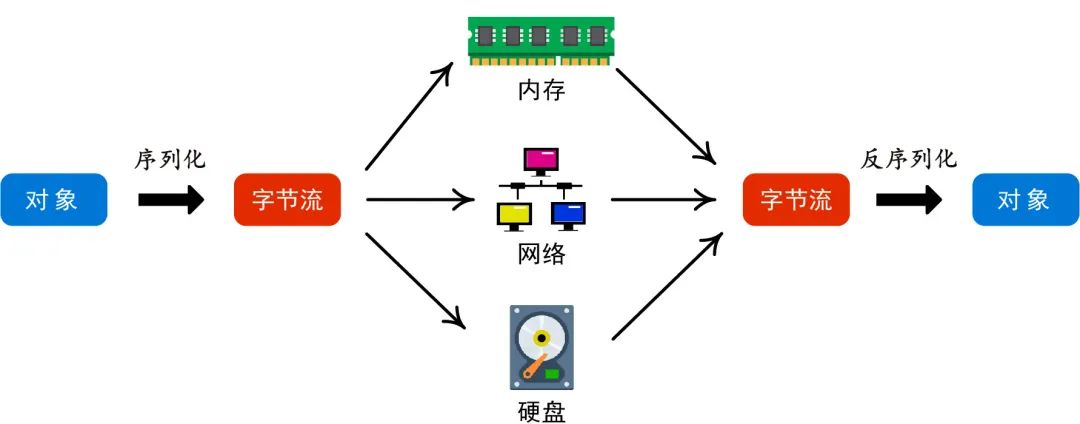
“序列化”(Serialization )的意思是將一個對象轉化為字節流。
這里說的對象可以理解為“面向對象”里的那個對象,具體的就是存儲在內存中的對象數據。
與之相反的過程是“反序列化”(Deserialization )。
雖然掛著機器人的羊頭,但是后面的介紹全部是計算機知識,跟機器人一丁點關系都沒有,序列化就是一個純粹的計算機概念。
序列化的英文Serialize就有把一個東西變成一串連續的東西之意。
形象的描述,數據對象是一團面,序列化就是將面團拉成一根面條,反序列化就將面條捏回面團。
另一個形象的類比是我們在對話或者打電話時,一個人的思想轉換成一維的語音,然后在另一個人的頭腦里重新變成結構化的思想,這也是一種序列化。
面對序列化,很多人心中可能會有很多疑問。
首先,為什么要序列化?或者更具體的說,既然對象的信息本來就是以字節的形式儲存在內存中,那為什么要多此一舉把一些字節數據轉換成另一種形式的、一維的、連續的字節數據呢?
如果我們的程序在內存中存儲了一個數字,比如25。那要怎么傳遞25這個數字給別的程序節點或者把這個數字永久存儲起來呢?
很簡單,直接傳遞25這個數字(的字節表示,即0X19,當然最終會變成二進制表示11001以高低電平傳輸存儲)或者直接把這個數字(的字節表示)寫進硬盤里即可。
所以,對于本來就是連續的、一維的、一連串的數據(例如字符串),序列化并不需要做太多東西,其本質是就是由內存向其它地方拷貝數據而已。
所以,如果你在一個序列化庫里看到memcpy函數不用覺得奇怪,因為你知道序列化最底層不過就是在操作內存數據而已(還有些庫使用了流的ostream.rdbuf()->sputn函數)。
可是實際程序操作的對象很少是這么簡單的形式,大多數時候我們面對的是包含不同數據類型(int、double、string)的復雜數據結構(比如vector、list),它們很可能在內存中是不連續存儲的而是分散在各處。比如ROS的很多消息都包含向量。
數據中還有各種指針和引用。而且,如果數據要在運行于不同架構的計算機之上的、由不同編程語言所編寫的節點程序之間傳遞,那問題就更復雜了,它們的字節順序endianness規定有可能不一樣,基本數據類型(比如int)的長度也不一樣(有的int是4個字節、有的是8個字節)。
這些都不是通過簡單地、原封不動地復制粘貼原始數據就能解決的。這時候就需要序列化和反序列化了。
所以在程序之間需要通信時(ROS恰好就是這種情況),或者希望保存程序的中間運算結果時,序列化就登場了。
另外,在某種程度上,序列化還起到統一標準的作用。

我們把被序列化的東西叫object(對象),它可以是任意的數據結構或者對象:結構體、數組、類的實例等等。
把序列化后得到的東西叫archive,它既可以是人類可讀的文本形式,也可以是二進制形式。
前者比如JSON和XML,這兩個是網絡應用里最常用的序列化格式,通過記事本就能打開閱讀;
后者就是原始的二進制文件,比如后綴名是bin的文件,人類是沒辦法直接閱讀一堆的0101或者0XC9D23E72的。
序列化算是一個比較常用的功能,所以大多數編程語言(比如C++、Python、Java等)都會附帶用于序列化的庫,不需要你再去造輪子。
以C++為例,雖然標準STL庫沒有提供序列化功能,但是第三方庫Boost提供了[ 2 ]谷歌的protobuf也是一個序列化庫,還有Fast-CDR,以及不太知名的Cereal,Java自帶序列化函數,python可以使用第三方的pickle模塊實現。
總之,序列化沒有什么神秘的,用戶可以看看這些開源的序列化庫代碼,或者自己寫個小程序試試簡單數據的序列化,例如這個例子,或者這個,有助于更好地理解ROS中的實現。
1.2ROS中的序列化實現
理解了序列化,再回到ROS。我們發現,ROS沒有采用第三方的序列化工具,而是選擇自己實現,代碼在roscpp_core項目下的roscpp_serialization中,見下圖。這個功能涉及的代碼量不是很多。
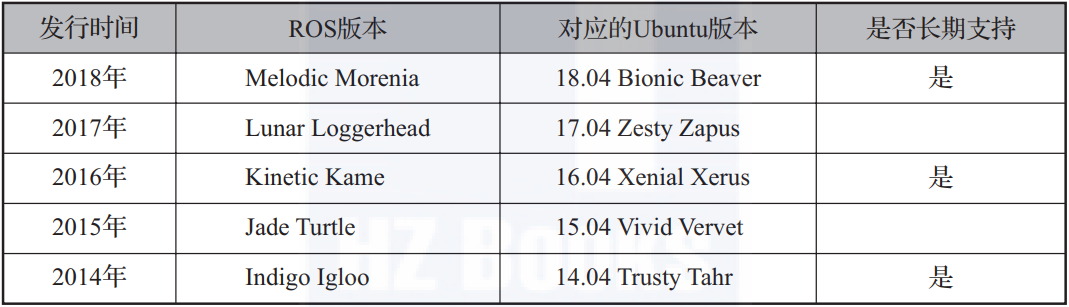
為什么ROS不使用現成的序列化工具或者庫呢?可能ROS誕生的時候(2007年),有些序列化庫可能還不存在(protobuf誕生于2008年),更有可能是ROS的創造者認為當時沒有合適的工具。
1.2.1serialization.h
核心的函數都在serialization.h里,簡而言之,里面使用了C語言標準庫的memcpy函數把消息拷貝到流中。
下面來看一下具體的實現。
序列化功能的特點是要處理很多種數據類型,針對每種具體的類型都要實現相應的序列化函數。
為了盡量減少代碼量,ROS使用了模板的概念,所以代碼里有一堆的template。
從后往前梳理,先看Stream這個結構體吧。在C++里結構體和類基本沒什么區別,結構體里也可以定義函數。
Stream翻譯為流,流是一個計算機中的抽象概念,前面我們提到過字節流,它是什么意思呢?
在需要傳輸數據的時候,我們可以把數據想象成傳送帶上連續排列的一個個被傳送的物體,它們就是一個流。
更形象的,可以想象磁帶或者圖靈機里連續的紙帶。在文件讀寫、使用串口、網絡Socket通信等領域,流經常被使用。例如我們常用的輸入輸出流:
cout<<"helllo"; 由于使用很多,流的概念也在演變。想了解更多可以看這里。
struct Stream
{
// Returns a pointer to the current position of the stream
inline uint8_t* getData() { return data_; }
// Advances the stream, checking bounds, and returns a pointer to the position before it was advanced.
// \\throws StreamOverrunException if len would take this stream past the end of its buffer
ROS_FORCE_INLINE uint8_t* advance(uint32_t len)
{
uint8_t* old_data = data_;
data_ += len;
if (data_ > end_)
{
// Throwing directly here causes a significant speed hit due to the extra code generated for the throw statement
throwStreamOverrun();
}
return old_data;
}
// Returns the amount of space left in the stream
inline uint32_t getLength() { return static_cast<uint32_t>(end_ - data_); }
protected:
Stream(uint8_t* _data, uint32_t _count) : data_(_data), end_(_data + _count) {}
private:
uint8_t* data_;
uint8_t* end_;
};
-
機器人
+關注
關注
211文章
28646瀏覽量
208431 -
操作系統
+關注
關注
37文章
6896瀏覽量
123755 -
ROS
+關注
關注
1文章
280瀏覽量
17102
發布評論請先 登錄
相關推薦
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
【IntoRobot Atom試用體驗】解決Atom搭建機器人操作系統問題(二)
請問能分享ROS機器人操作系統的一些資料嗎?
【ROS RIKIBOT基礎--使用系列 第一章節】ROS機器人硬件系統 精選資料分享
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
ROS是什么?機器人操作系統ROS的介紹

ROS的含義與機器人操作系統ROS的介紹
微軟宣布Window10將正式引入機器人操作系統
機器人操作系統(ROS)是一種用于機器人開發的元操作系統
ROS機器人操作系統的實現原理(下)
ROS機器人操作系統






 工商網監
工商網監
評論