") 順序、時(shí)鐘與分布式系統(tǒng)介紹
順序、時(shí)鐘與分布式系統(tǒng)介紹
Ordering
現(xiàn)實(shí)生活中時(shí)間可以記錄事情發(fā)生的時(shí)刻、比較事情發(fā)生的先后順序。
分布式系統(tǒng)的一些場景也需要記錄和比較不同節(jié)點(diǎn)間事件發(fā)生的順序。如數(shù)據(jù)寫入先后順序,事件發(fā)生的先后順序等等。
關(guān)系
復(fù)習(xí)下離散數(shù)學(xué)中關(guān)系:
假設(shè)A是一個(gè)集合 {1,2,3,4} ;R是集合A上的關(guān)系,例如{<1,1>,<2,2>,<3,3>,<4,4>,<1,2>,<1,4>,<2,4>,<3,4>}
- 自反性:任取一個(gè)A中的元素x,如果都有在R中,那么R是自反的。
- <1,1>,<2,2>,<3,3>,<4,4>
- 對稱性:任取一個(gè)A中的元素x,y,如果 在關(guān)系R上,那么 也在關(guān)系R上,那么R是對稱的。
- 反對稱性:任取一個(gè)A中的元素x,y(x!=y),如果 在關(guān)系R上,那么 不在關(guān)系R上,那么R是反對稱的。
- 對于 <1,2>,有 <2,1> 不在R中;對于<2,4> 有<4,2>不在R中;對于<3,4> 有<4,3> 不在 R中,滿足。
- 傳遞性:任取一個(gè)A中的元素x,y,z,如果, 在關(guān)系R上,那么 也在關(guān)系R上,那么R是對稱的。
- <1,1><1,2>在R中,并且<1,2>在R中;<1,1><1,4>在R中,并且<1,4>在R中;<2,2><2,4>在R中,并且<2,4>在R中;<3,3><3,4>在R中,并且<3,4>在R中;等等其他,滿足。
- 完全性(全關(guān)系):包含了自反性;對集合A中所有,都有關(guān)系x到y(tǒng)或y到x;
- R中并沒有<1, 3>,所以不滿足完全性
偏序The Partial Ordering
集合內(nèi)只有部分元素之間是可以比較的。
偏序關(guān)系的定義(R為A上的偏序關(guān)系):設(shè)R是集合A上的一個(gè)二元關(guān)系,若R滿足:
- 反對稱性:對任意x,y∈A,若xRy,且yRx,則x=y;
- 傳遞性:對任意x, y,z∈A,若xRy,且yRz,則xRz
- 自反性:對任意x∈A,有xRx;
一個(gè)partitial ordering關(guān)系滿足的條件是自反的,反對稱的和可傳遞的,因此在partitial ordering中,可能有兩個(gè)元素之間是不相關(guān)的。
全序The Total Ordering
集合內(nèi)只有部分元素之間是可以比較的。
比如:比如復(fù)數(shù)集中并不是所有的數(shù)都可以比較大小,那么“大小”就是復(fù)數(shù)集的一個(gè)偏序關(guān)系。
全序關(guān)系的定義:
- 反對稱性:對任意x,y∈A,若xRy,且yRx,則x=y;
- 傳遞性:對任意x, y,z∈A,若xRy,且yRz,則xRz
- 完全性(total relation全關(guān)系):對任意x,y∈A,由xRy或yRx (包括了自反性)
完全性本身也包括了自反性,所以全序關(guān)系是偏序關(guān)系。
所以偏序中滿足完全性就是全序了。
一個(gè)total ordering關(guān)系滿足的條件是反對稱的,可傳遞的和完全性,因此在total ordering中,兩個(gè)元素一定是有關(guān)系的,要么是a<>b或b<>a。
happens before
在分布式系統(tǒng)中,一個(gè)進(jìn)程包含一系列的事件,對于同一進(jìn)程內(nèi)的事件,如果a happens before b,那么a發(fā)生在b之前。并且,假定收或發(fā)消息都是一個(gè)事件。
happens before的定義如下(用->表示)
- 如果a和b在同一進(jìn)程中,并且a發(fā)生在b之前,那么a->b
- 如果a是一個(gè)進(jìn)程發(fā)消息的事件,b是另一個(gè)進(jìn)程接收這條消息的事件,則a->b
- 如果a->b且b->c,那么a->c。
- 如果同時(shí)不滿足a->b,且b->a,那么說a和b是并發(fā)的concurrent
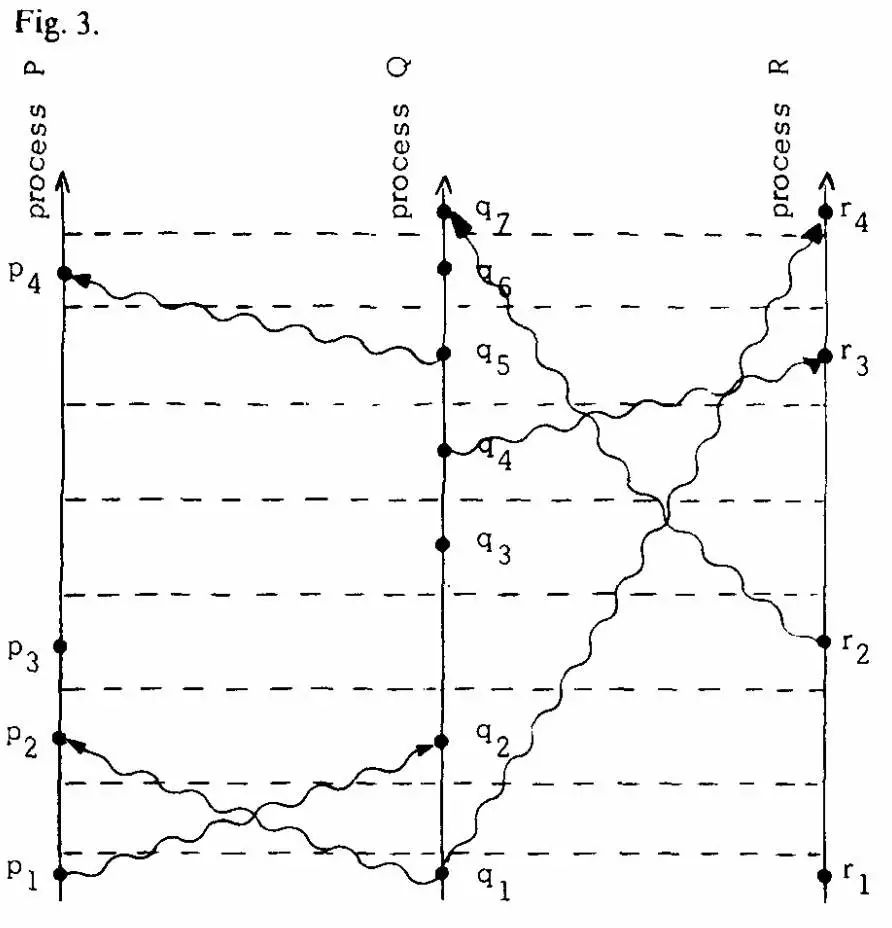
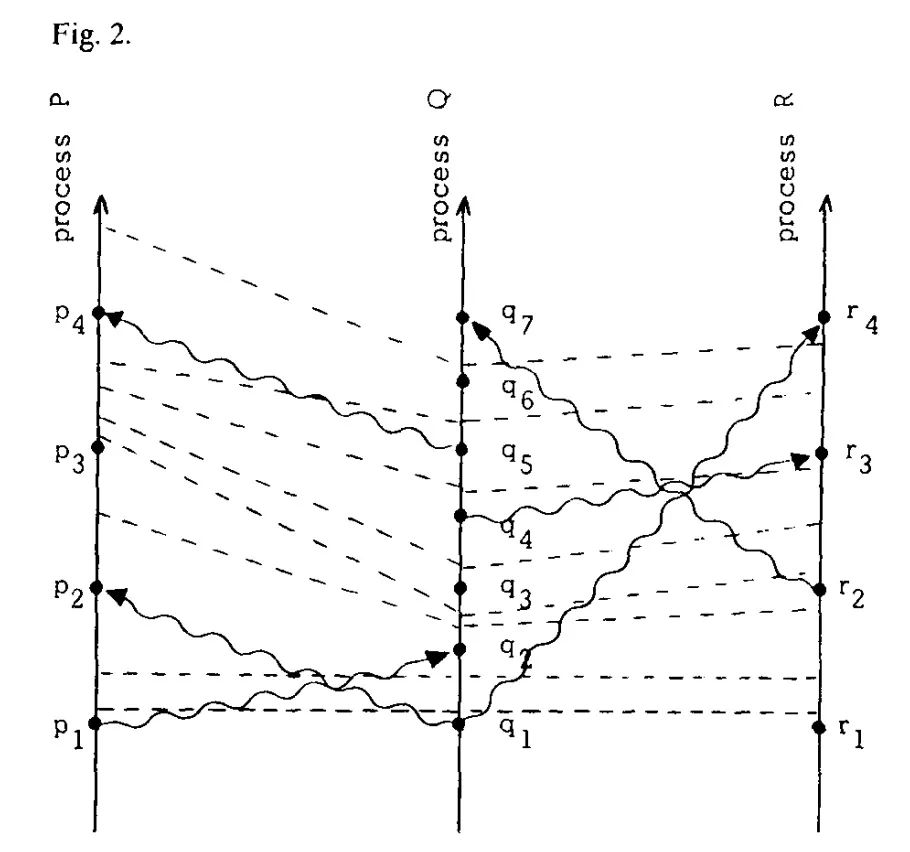 [圖來自Time, Clocks, and the Ordering of Events in a Distributed System]
[圖來自Time, Clocks, and the Ordering of Events in a Distributed System]
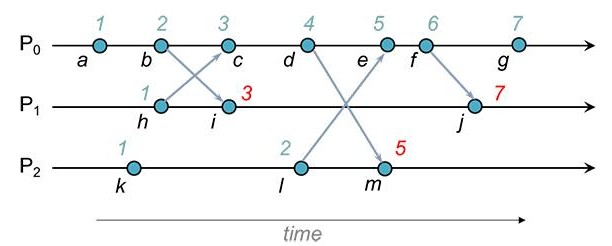
以一個(gè)例子來說明happens before關(guān)系,如上圖,垂直線上代表一個(gè)進(jìn)程,從下往上,時(shí)間依次增加,水平的距離代表空間的隔離。原點(diǎn)代表一個(gè)事件,而曲線代表一條消息。
從圖中很容易地看出,如果一個(gè)事件a,能通過進(jìn)程的線和消息線,到達(dá)b,那么a->b。
在圖中,p3和q4是并行的事件,因?yàn)椋挥械搅藀4才能確定q4的發(fā)生,而q3也只能確定p1發(fā)生。
clock時(shí)鐘
物理時(shí)鐘
晶振和時(shí)鐘偏移
計(jì)算機(jī)有固定頻率晶體的震蕩次數(shù),晶體的振蕩周期決定了單機(jī)的時(shí)鐘精度。
時(shí)鐘頻率也可能因?yàn)闇囟鹊韧獠恳蛩貙?dǎo)致時(shí)鐘偏移,普通的石英晶體的漂移大10 ^-6^ 。 原子鐘的漂移約為 10^-13^ ,所以原子鐘精度遠(yuǎn)遠(yuǎn)高于石英晶體。
分布式下帶來的問題
不同機(jī)器上的物理時(shí)鐘難以同步,導(dǎo)致無法區(qū)分在分布式系統(tǒng)中多個(gè)節(jié)點(diǎn)的事件時(shí)序。即使設(shè)置了 NTP 時(shí)間同步節(jié)點(diǎn)間也存在毫秒級別的偏差,因而分布式系統(tǒng)需要有另外的方法記錄事件順序關(guān)系。
1978年Lamport在《Time, Clocks and the Ordering of Events in a Distributed System》中提出了邏輯時(shí)鐘的概念,來解決分布式系統(tǒng)中區(qū)分事件發(fā)生的時(shí)序問題。
邏輯時(shí)鐘Logical clocks
邏輯時(shí)鐘指的是分布式系統(tǒng)中用于區(qū)分事件的發(fā)生順序的時(shí)間機(jī)制。 從某種意義上講,現(xiàn)實(shí)世界中的物理時(shí)間其實(shí)是邏輯時(shí)鐘的特例。
Logical Clock解決的問題是找到一種方法,給分布式系統(tǒng)中所有時(shí)間定一個(gè)序,這個(gè)序能夠正確地排列出具有因果關(guān)系的事件(注意,是不能保證并發(fā)事件的真實(shí)順序的),使得分布式系統(tǒng)在邏輯上不會(huì)發(fā)生因果倒置的錯(cuò)誤。因果一致性
Lamport timestamps
論文
Time, Clocks, and the Ordering of Events in a Distributed System
Lamport timestamps
Leslie Lamport 在1978年提出邏輯時(shí)鐘的概念,并描述了一種邏輯時(shí)鐘的表示方法,這個(gè)方法被稱為Lamport時(shí)間戳(Lamport timestamps)。
分布式系統(tǒng)中按是否存在節(jié)點(diǎn)交互可分為三類事件:
- 發(fā)生在節(jié)點(diǎn)內(nèi)部
- 發(fā)送事件
- 接收事件
時(shí)鐘的定義如下
- 對于一個(gè)進(jìn)程i,Ci(a)表示進(jìn)程i中事件a的發(fā)生時(shí)間
- 對于整個(gè)系統(tǒng)來講,對于任意的事件b,其發(fā)生時(shí)間為C(b),當(dāng)b為進(jìn)程j的事件時(shí),則C(b) = Cj(b)為了使得事件按照正確的排序,需要使得如果事件a發(fā)生在事件b之前,那么a發(fā)生的時(shí)間要小于b,如下
for any events a, b if a->b then C(a) < C(b)根據(jù)關(guān)系->的定義,我們可以得出
- 如果a和b都是進(jìn)程i中的事件,且a發(fā)生在b之前,那么Ci(a) < Ci(b)
- 如果事件a發(fā)送消息給事件b,a屬于進(jìn)程i,b屬于進(jìn)程j,那么Ci(a) < Cj(b)
為了讓系統(tǒng)滿足上述條件,在實(shí)現(xiàn)中,需要滿足以下原則
- 對于每個(gè)進(jìn)程,相鄰的事件的時(shí)鐘要增加1
- (a) 如果事件a是進(jìn)程i發(fā)送消息m的事件,發(fā)送時(shí)帶時(shí)間戳Tm = Ci(a),(b)事件b是進(jìn)程j接受消息m的事件,那么事件b的取值為max(進(jìn)程b的當(dāng)前時(shí)鐘,Tm+1)
假設(shè)有事件a、b,C(a)、C(b)分別表示事件a、b對應(yīng)的Lamport時(shí)間戳,如果a->b,則C(a) < C(b),a發(fā)生在b之前(happened before)。
所以Lamport timestamps原理如下:
- 每個(gè)事件對應(yīng)一個(gè)Lamport時(shí)間戳,初始值為0
- 如果事件在節(jié)點(diǎn)內(nèi)發(fā)生,時(shí)間戳加1
- 如果事件屬于發(fā)送事件,時(shí)間戳加1并在消息中帶上該時(shí)間戳
- 如果事件屬于接收事件,時(shí)間戳 = Max(本地時(shí)間戳,消息中的時(shí)間戳) + 1
通過該定義,事件集中Lamport時(shí)間戳不等的事件可進(jìn)行比較,我們獲得事件的偏序關(guān)系(partial order)。
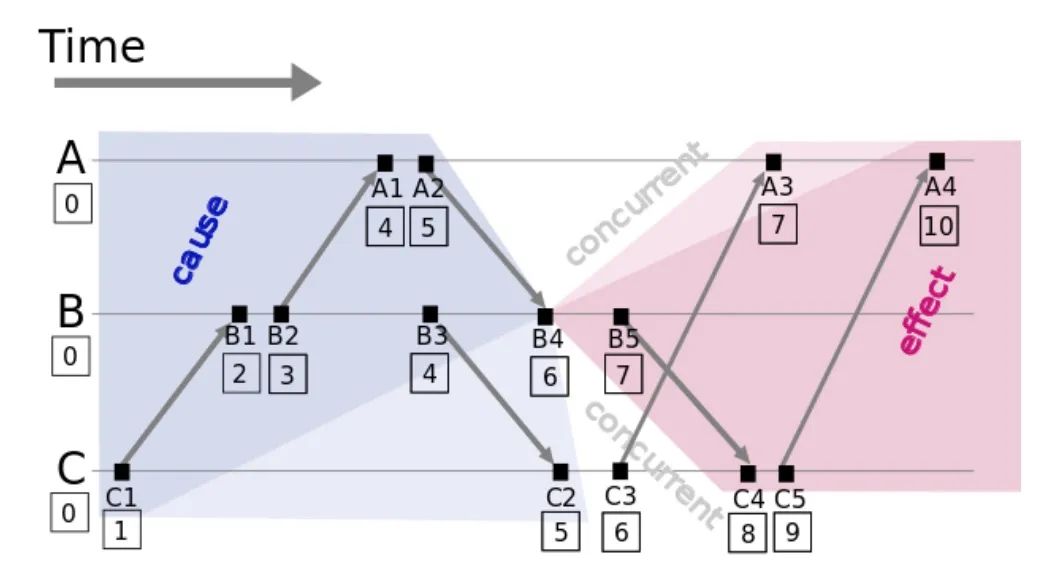
上圖更形象的解釋了事件之間的關(guān)系。
以B4事件為基準(zhǔn):
- B4左邊深灰色的區(qū)域的事件,都發(fā)生在B4前,和B4具有因果關(guān)系,這些事件屬于與B4因果關(guān)系中的因(cause)
- B4右邊的深紅色區(qū)域的事件,都發(fā)生在B4后,和B4具有因果關(guān)系,這些事件屬于與B4因果關(guān)系中的果(effect)
- B4上下的白色區(qū)域是跟B4無關(guān)的事件,可以認(rèn)為是并發(fā)關(guān)系(concurrent)
- 在淺灰色和淺紅色區(qū)域中的事件,C2、A3兩個(gè)事件與B4是并行關(guān)系,根據(jù)Lamport timestamps的定義,將他們判定為與B4具前后關(guān)系。(所以Lamport timestamps并不能嚴(yán)格的表示并行關(guān)系)
Lamport timestamps與偏序關(guān)系
Lamport timestamps只保證因果關(guān)系(偏序)的正確性,不保證絕對時(shí)序的正確性。
Lamport logical clock
由于Lamport timestamps只能得到偏序關(guān)系,如果要得到全序關(guān)系,就需要給Ci(a) = Cj(b)的事件定一個(gè)先后順序。
total order的事件關(guān)系=>定義如下:
如果事件a發(fā)生在進(jìn)程Pi,事件b發(fā)生在進(jìn)程Pj,那么當(dāng)滿足下列兩者條件之一時(shí),a=>b
- Ci(a) < Cj(b)
- Ci(a) = Cj(b) 且 Pi < Pj
根據(jù)以上條件,對于任意的兩個(gè)事件,都能判斷出它們之間的關(guān)系,因此是total ordering的。
當(dāng)Lamport timestamp一致時(shí),通過義Pi < Pj來定義順序,確保分布式場景下各個(gè)進(jìn)程間發(fā)生的事件的全序定義。至于Pj < Pj:可采用不同的方式,Lamport Logical Clock提到的 arbitrary total ordering。
vector clock
Lamport timestamp得到的是全序關(guān)系,但無法嚴(yán)格表示對于沒有因果關(guān)系、存在同時(shí)發(fā)生關(guān)系(concurrent)的事件。
Vector clock是在Lamport timestamp基礎(chǔ)上改進(jìn)的一種邏輯時(shí)鐘方法,它構(gòu)不但記錄本節(jié)點(diǎn)的Lamport timestamp,同時(shí)也記錄了其他節(jié)點(diǎn)的Lamport timestamp。
原理如下:
- 本地vector clock的clock數(shù)組中每一個(gè)邏輯時(shí)間(clock)對應(yīng)一個(gè)進(jìn)程的clock
- 初始化vector clock中每一個(gè)邏輯時(shí)間為0;
- 每一次處理內(nèi)完內(nèi)部事件,將vector clock中自己的邏輯時(shí)間戳+1;
- 每發(fā)送一個(gè)消息的時(shí)候,將vector clock中自己的邏輯時(shí)間+1,且將其和消息一起發(fā)送出去
- 每接收到一個(gè)消息的時(shí)候,需要將本地的vector clock中自己的邏輯時(shí)間戳+1,且將自己vector clock中的邏輯時(shí)間和消息中攜帶的進(jìn)行比較,取最大的更新本地vector clock中的邏輯時(shí)間。
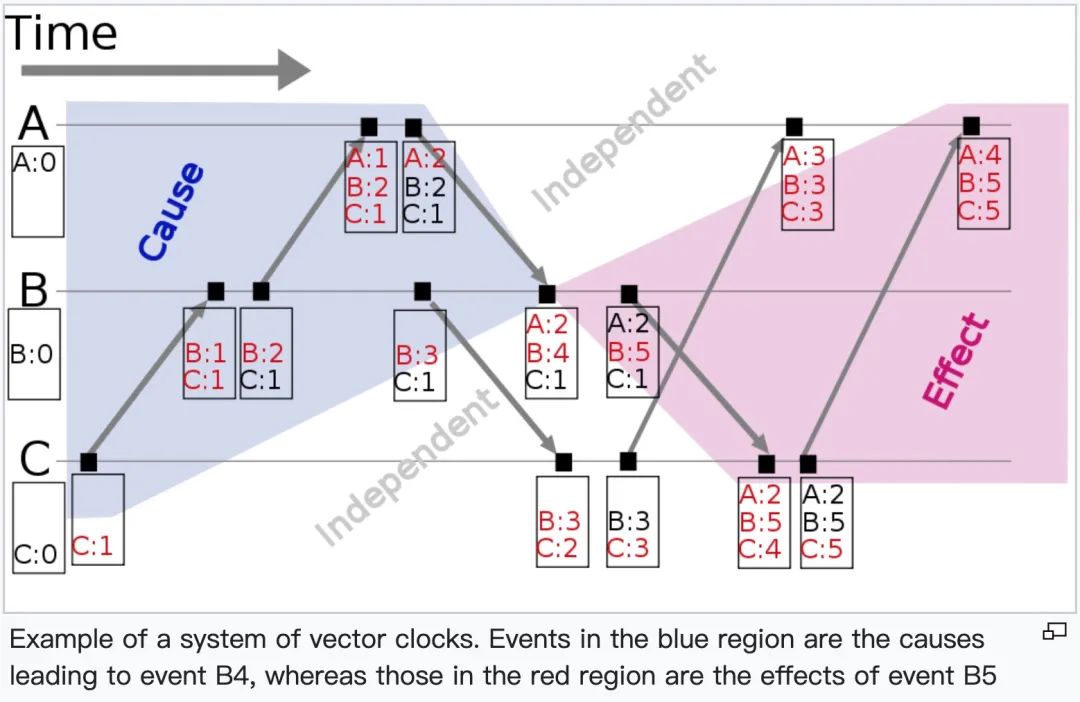 圖來源于wikipedia
圖來源于wikipedia
vector clock判定并發(fā)關(guān)系:
- 事件i、事件j對應(yīng)的vector clock中,每一個(gè)進(jìn)程Pk的邏輯時(shí)間戳都滿足Vi[Pk]
- vector clock中,存在P1、P2,使得Vi[P1]Vj[P2],我們稱事件i和事件j是并發(fā)關(guān)系(沒有因果關(guān)系);
和之前l(fā)amport timestamp的一樣,以B4事件為基準(zhǔn)(vector clock為[A:2,B:4,C:1]),根據(jù)vector clock的判定,可以判斷出
- 灰色區(qū)域的事件happens before B4事件,B4事件happens before紅色區(qū)域的事件
- 白色區(qū)域與B4事件沒有因果關(guān)系。
特性:
- vector clock不需要在節(jié)點(diǎn)之間同步時(shí)鐘,不需要在所有節(jié)點(diǎn)上維護(hù)一段數(shù)據(jù)的版本數(shù);
- 缺點(diǎn)是時(shí)鐘值的大小隨著節(jié)點(diǎn)增多和時(shí)間不斷增長
version vector
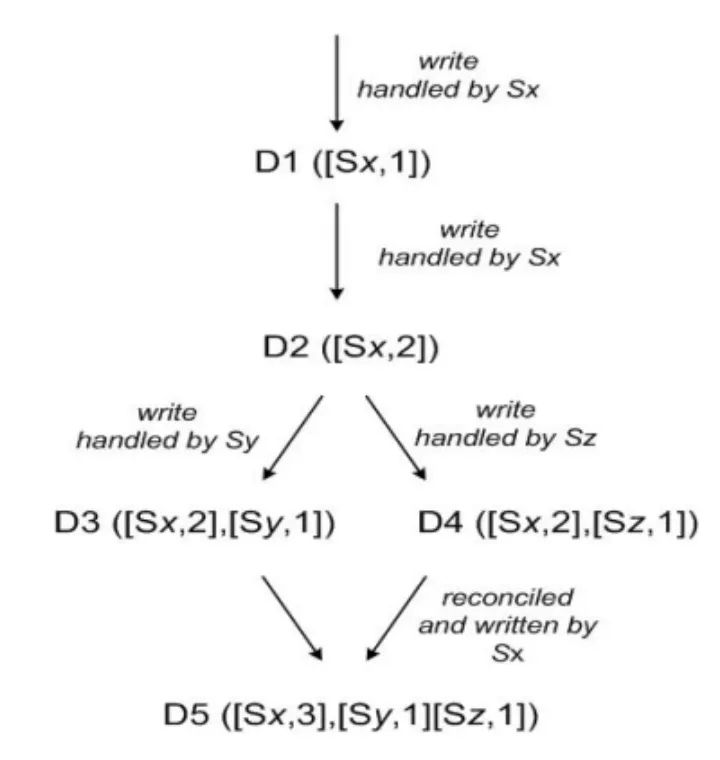
分布式系統(tǒng)多個(gè)副本被同時(shí)更新時(shí),會(huì)導(dǎo)致副本之間數(shù)據(jù)的不一致。version vector用于來發(fā)現(xiàn)這些不一致的沖突。
version vector只能發(fā)現(xiàn)沖突,無法解決沖突;當(dāng)然也可以通過再添加一個(gè)維度信息timestamp,發(fā)生沖突時(shí)進(jìn)行比較,但是又回到了物理時(shí)鐘不同步的問題。
下圖展示了數(shù)據(jù)由不同副本處理后導(dǎo)致的不同版本沖突。
D5時(shí)發(fā)現(xiàn)了數(shù)據(jù)的沖突,這時(shí)會(huì)將不同版本數(shù)據(jù)都存儲下來,一般由客戶端來解決沖突。
version vector與vector clock的差異
- vector clocks 使用 receive和send 方法來更新clock,而version vector使用sync方法來更新。
- vector clocks是給事件定序的,確定事件的因果關(guān)系;而version vector是確定同一個(gè)數(shù)據(jù)不同版本的因果關(guān)系。
分布式與時(shí)鐘
分布式系統(tǒng)中,每個(gè)節(jié)點(diǎn)的物理時(shí)鐘是不同步的,都有一定的差異。
這樣就帶來了一些分布式系統(tǒng)實(shí)現(xiàn)的難題,如基于MVCC實(shí)現(xiàn)的事務(wù),基于MVCC實(shí)現(xiàn)事務(wù)會(huì)要求版本之間能判斷先后順序,只有確定先后才知道應(yīng)該用哪一個(gè)版本的數(shù)據(jù),確定先后順序就涉及到時(shí)間,而不同機(jī)器之間的本地時(shí)鐘是無法保證一致的,所以這就需要確保時(shí)鐘的同步。
而通常解決方案有兩種:
Timestamp oracle
如果我們整個(gè)系統(tǒng)不復(fù)雜,而且沒有跨全球的需求,這時(shí)用一臺中心授時(shí)服務(wù)就可以了。
如TiDB使用的就是TSO方案,tipb作為一個(gè)TSO集群,來提供授時(shí)服務(wù)。
使用TSO的好處在于因?yàn)橹挥幸粋€(gè)中心授時(shí),所以我們一定能確定所有時(shí)間的時(shí)間,但TSO需要關(guān)注幾個(gè)問題:
- 網(wǎng)絡(luò)延時(shí):因?yàn)樗械氖录夹枰獜腡SO獲取時(shí)間,所以TSO只適合小集群部署,不能是那種全球級別的數(shù)據(jù)庫
- 性能:每個(gè)事件都需要從TSO獲取時(shí)間,所以TSO需要非常高的性能
- 容錯(cuò):TSO是一個(gè)單點(diǎn),需要考慮節(jié)點(diǎn)的failover
True Time
由于節(jié)點(diǎn)間NTP是有偏差的,且可能出現(xiàn)時(shí)間回退的情況,所以NTP無法準(zhǔn)確的判定事件的全序關(guān)系。在Google Spanner里面,通過引入True Time來解決了分布式時(shí)間問題。
True Time實(shí)現(xiàn)
Spanner通過使用GPS + 原子鐘atomic clock來對集群的機(jī)器時(shí)間進(jìn)行校對,保證了集群機(jī)器的時(shí)間戳差距不會(huì)超過一個(gè)上限值(ε)。
用兩種技術(shù)來處理,是因?yàn)閷?dǎo)致這兩種技術(shù)的失敗的原因是不同的。
- GPS會(huì)有一個(gè)天線,電波干擾會(huì)導(dǎo)致其失靈。原子鐘很穩(wěn)定。
- 當(dāng)GPS失靈的時(shí)候,原子鐘仍然能保證在相當(dāng)長的時(shí)間內(nèi),不會(huì)出現(xiàn)偏差。
API
- TT.now() : 返回一個(gè)當(dāng)前時(shí)間,其位于范圍區(qū)間[earliest,latest]
- TT.after(t) : 當(dāng)前時(shí)間是否在t之后
- TT.before(t) : 當(dāng)前時(shí)間是否在t之前
雖然spanner引入了TrueTime可以得到全球范圍的時(shí)序一致性,但由于TrueTime返回的時(shí)間仍然有一定的偏差,如果要給兩個(gè)事件定序,就需要等待2個(gè)偏差的時(shí)間間隔,來確保其先后順序。
- 事件a:[Tai, Taj], Taj-Tai=ε
- 事件b:[Tbi, Tbj], Tbj-Tbi=ε
- 所以要確定b>a, 那么就要確保Tbi > Taj, 就需要在事件b進(jìn)行等待,以確保:
事件b時(shí)間 - 事件a時(shí)間 > 2ε
Hybrid logical clock
HLC
Logical Physical Clocks and Consistent Snapshots in Globally Distributed Databases
TrueTime 需要硬件的支持,所以有一定的成本,而HLC無需硬件支持也能解決分布式下時(shí)間問題。
HLC同時(shí)使用了物理時(shí)鐘和邏輯時(shí)鐘(physical clock + logical clock),能夠保證單點(diǎn)的時(shí)間發(fā)生器是單調(diào)遞增的,同時(shí)能夠盡量控制不同節(jié)點(diǎn)之間的時(shí)鐘偏差在規(guī)定的偏差范圍內(nèi)。
判斷兩個(gè)事件的先后順序:先判斷物理時(shí)間,再判斷邏輯時(shí)間。
HLC的算法
l.j維護(hù)的是節(jié)點(diǎn)j當(dāng)前已知的最大的物理時(shí)間(wall time),c.j則是當(dāng)前的邏輯時(shí)間。
// 在節(jié)點(diǎn)j上面:初始化: l.j = 0,c.j = 0。
initially l.j :=0; c.j := 0
// 本地事件或者發(fā)送消息時(shí),
// 如果本地時(shí)鐘pt大于當(dāng)前的混合邏輯時(shí)鐘的l,
// 則將l更新成本地時(shí)鐘,將c清零。
// 否則,l保持不變,將c加1。
Send or local event
{
l'.j := l.j;
l.j := max(l'.j, pt.j); // 本地物理時(shí)間pt
if (l.j = l'.j) then
c.j := c.j+1
else
c.j := 0;
Timestamp with l.j, c.j
}
// 收到消息時(shí)
// l在 當(dāng)前的邏輯時(shí)鐘的l、機(jī)器的本地時(shí)鐘pt、收到消息里面帶的l,三者中取最大的。
// 如果l部分是更新為本地時(shí)鐘了,則將c清零。否則,c取較大的那個(gè)l對應(yīng)到的c加1。
Receive event of message m
{
l'.j := l.j;
l.j := max(l'.j, l.m, pt.j);
if (l.j = l'.j = l.m) then
c.j := max(c.j, c.m) + 1
elseif (l.j=l'.j) then
c.j := c.j + 1
elseif (l.j=l.m) then
c.j := c.m + 1
else
c.j := 0
Timestamp with l.j, c.j
}
特性
HLC算法保證了HLC時(shí)間有如下特性:
- 事件e發(fā)生在事件f之前,那么事件e的HLC時(shí)間一定小于事件f的HLC時(shí)間:(l.e, c.e) < (l.f, c.f)
- 本地WallTime大于等于本地物理時(shí)間(l.e ≥ pt.e):HLC時(shí)間總是不斷遞增,不會(huì)隨著物理時(shí)間發(fā)生回退。
- 對事件e,l.e是事件e能感知的到的最大物理時(shí)間值:如果l.e > pt.e,那么一定存在著一個(gè)發(fā)生在e之前的事件g,有pt.g=l.e。簡單來說是如果出現(xiàn)l.e > pt.e肯定是因?yàn)橛幸粋€(gè)HLC時(shí)間更大的的節(jié)點(diǎn)把當(dāng)前節(jié)點(diǎn)的HLC時(shí)間往后推了。
- WallTime和物理時(shí)鐘的偏差是有界的(ε ≥ |pt.e - l.e| ):因?yàn)楣?jié)點(diǎn)之間通過NTP服務(wù)校時(shí),那么節(jié)點(diǎn)之間的物理時(shí)鐘偏差一定小于某個(gè)值ε。那么對于任一事件b和e,如果b hb e,那么事件b的物理時(shí)間pt.b一定滿足pt.e + ε ≥ pt.b。結(jié)合特性3存在一個(gè)事件g滿足,l.e = pt.g。那么 pt.e + ε ≥ l.e=pt.g > pt.e。
開源實(shí)現(xiàn)
CockroachDB采用基于NTP時(shí)鐘同步的HLC去中心化方案。
時(shí)鐘同步
所有節(jié)點(diǎn)間的RPC消息都會(huì)把時(shí)間戳帶入到消息中,接收到消息的節(jié)點(diǎn)會(huì)通過消息中的時(shí)間戳更新自己的時(shí)間, 從而達(dá)到節(jié)點(diǎn)間時(shí)間同步的效果。
代碼分析
HLC定義
// Timestamp represents a state of the hybrid logical clock.
type Timestamp struct {
// Holds a wall time, typically a unix epoch time
// expressed in nanoseconds.
WallTime int64 `protobuf:"varint,1,opt,name=wall_time,json=wallTime" json:"wall_time"`
// The logical component captures causality for events whose wall
// times are equal. It is effectively bounded by (maximum clock
// skew)/(minimal ns between events) and nearly impossible to
// overflow.
Logical int32 `protobuf:"varint,2,opt,name=logical" json:"logical"`
}
- WallTime:本地已知物理時(shí)鐘
- Logical:邏輯時(shí)鐘
- Timestamp:HLC,單調(diào)遞增
獲取物理時(shí)鐘
// PhysicalNow returns the local wall time. It corresponds to the physicalClock
// provided at instantiation. For a timestamp value, use Now() instead.
func (c *Clock) PhysicalNow() int64 {
c.mu.Lock()
defer c.mu.Unlock()
return c.getPhysicalClockLocked()
}
// getPhysicalClockLocked returns the current physical clock and checks for
// time jumps.
func (c *Clock) getPhysicalClockLocked() int64 {
// physicalClock 就是 UnixNano
newTime := c.physicalClock()
if c.mu.lastPhysicalTime != 0 {
interval := c.mu.lastPhysicalTime - newTime
// 檢查時(shí)鐘是否回退
if interval > int64(c.maxOffset/10) {
c.mu.monotonicityErrorsCount++
log.Warningf(context.TODO(), "backward time jump detected (%f seconds)", float64(-interval)/1e9)
}
}
c.mu.lastPhysicalTime = newTime
return newTime
}
// UnixNano returns the local machine's physical nanosecond
// unix epoch timestamp as a convenience to create a HLC via
// c := hlc.NewClock(hlc.UnixNano, ...).
func UnixNano() int64 {
return timeutil.Now().UnixNano()
}
獲取當(dāng)前HLC時(shí)鐘
// Now returns a timestamp associated with an event from
// the local machine that may be sent to other members
// of the distributed network. This is the counterpart
// of Update, which is passed a timestamp received from
// another member of the distributed network.
func (c *Clock) Now() Timestamp {
c.mu.Lock()
defer c.mu.Unlock()
if physicalClock := c.getPhysicalClockLocked(); c.mu.timestamp.WallTime >= physicalClock {
// The wall time is ahead, so the logical clock ticks.
c.mu.timestamp.Logical++
} else {
// Use the physical clock, and reset the logical one.
c.mu.timestamp.WallTime = physicalClock
c.mu.timestamp.Logical = 0
}
return c.mu.timestamp
}
- 如果當(dāng)前物理時(shí)鐘小于WallTime,則將邏輯時(shí)鐘+1
- 如果當(dāng)前物理時(shí)鐘大于WallTime,則更新WallTime為當(dāng)前物理時(shí)鐘,且將邏輯時(shí)鐘設(shè)置為0
節(jié)點(diǎn)時(shí)鐘同步
節(jié)點(diǎn)之間通過在RPC請求中攜帶HLC時(shí)間來進(jìn)行時(shí)鐘同步。
// sendSingleRange gathers and rearranges the replicas, and makes an RPC call.
func (ds *DistSender) sendSingleRange(
ctx context.Context, ba roachpb.BatchRequest, desc *roachpb.RangeDescriptor,
) (*roachpb.BatchResponse, *roachpb.Error) {
......
br, err := ds.sendRPC(ctx, desc.RangeID, replicas, ba)
if err != nil {
log.ErrEvent(ctx, err.Error())
return nil, roachpb.NewError(err)
}
// If the reply contains a timestamp, update the local HLC with it.
if br.Error != nil && br.Error.Now != (hlc.Timestamp{}) {
ds.clock.Update(br.Error.Now)
} else if br.Now != (hlc.Timestamp{}) {
ds.clock.Update(br.Now)
}
......
}
// Update takes a hybrid timestamp, usually originating from
// an event received from another member of a distributed
// system. The clock is updated and the hybrid timestamp
// associated to the receipt of the event returned.
// An error may only occur if offset checking is active and
// the remote timestamp was rejected due to clock offset,
// in which case the timestamp of the clock will not have been
// altered.
// To timestamp events of local origin, use Now instead.
func (c *Clock) Update(rt Timestamp) Timestamp {
c.mu.Lock()
defer c.mu.Unlock()
// 如果本地物理時(shí)間pt
physicalClock := c.getPhysicalClockLocked()
// 大于本地WallTime且大于rt.WallTime:
// 更新本地WallTime=pt,且logical=0
if physicalClock > c.mu.timestamp.WallTime && physicalClock > rt.WallTime {
// Our physical clock is ahead of both wall times. It is used
// as the new wall time and the logical clock is reset.
c.mu.timestamp.WallTime = physicalClock
c.mu.timestamp.Logical = 0
return c.mu.timestamp
}
// In the remaining cases, our physical clock plays no role
// as it is behind the local or remote wall times. Instead,
// the logical clock comes into play.
// 如果rt.WallTime > 本地WallTime:
// 檢查rt.WallTime與pt是否大于時(shí)鐘偏差;
// 本地WallTime=rt.WallTime,logical++
if rt.WallTime > c.mu.timestamp.WallTime {
offset := time.Duration(rt.WallTime-physicalClock) * time.Nanosecond
if c.maxOffset > 0 && offset > c.maxOffset {
log.Warningf(context.TODO(), "remote wall time is too far ahead (%s) to be trustworthy - updating anyway", offset)
}
// The remote clock is ahead of ours, and we update
// our own logical clock with theirs.
c.mu.timestamp.WallTime = rt.WallTime
c.mu.timestamp.Logical = rt.Logical + 1
} else if c.mu.timestamp.WallTime > rt.WallTime {
// 如果本地WallTime>rt.WallTime:logical++
// Our wall time is larger, so it remains but we tick
// the logical clock.
c.mu.timestamp.Logical++
} else {
// Both wall times are equal, and the larger logical
// clock is used for the update.
if rt.Logical > c.mu.timestamp.Logical {
c.mu.timestamp.Logical = rt.Logical
}
c.mu.timestamp.Logical++
}
return c.mu.timestamp
}
-
gps
+關(guān)注
關(guān)注
22文章
2903瀏覽量
166741 -
發(fā)生器
+關(guān)注
關(guān)注
4文章
1368瀏覽量
61858 -
時(shí)鐘頻率
+關(guān)注
關(guān)注
0文章
50瀏覽量
20416 -
NTP
+關(guān)注
關(guān)注
1文章
180瀏覽量
13962 -
HLC
+關(guān)注
關(guān)注
0文章
6瀏覽量
11492
發(fā)布評論請先 登錄
相關(guān)推薦
分布式軟件系統(tǒng)
使用分布式I/O進(jìn)行實(shí)時(shí)部署系統(tǒng)的設(shè)計(jì)
如何設(shè)計(jì)分布式干擾系統(tǒng)?
分布式系統(tǒng)的優(yōu)勢是什么?
分布式系統(tǒng)時(shí)鐘解決方案
HDC2021技術(shù)分論壇:分布式軟時(shí)鐘有多重要?
HDC2021技術(shù)分論壇:分布式軟時(shí)鐘有多重要?
分布式數(shù)據(jù)采集系統(tǒng)中的時(shí)鐘同步
分布式數(shù)據(jù)采集系統(tǒng)中的時(shí)鐘同步

如何才能同步分布式系統(tǒng)中的所有時(shí)鐘
如何才能同步分布式系統(tǒng)中的所有時(shí)鐘?
【技術(shù)分享】EtherCAT 分布式時(shí)鐘簡介






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論