 Buck基本原理及調制方式
Buck基本原理及調制方式
一、Buck架構
1、異步Buck
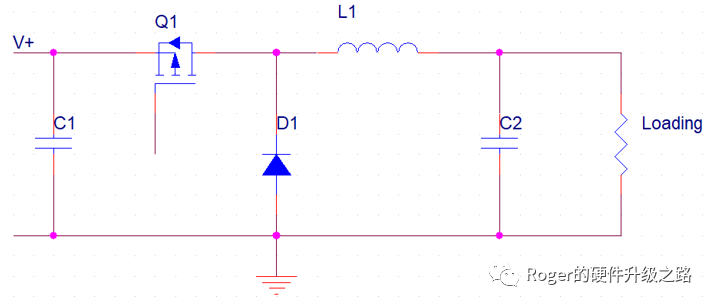
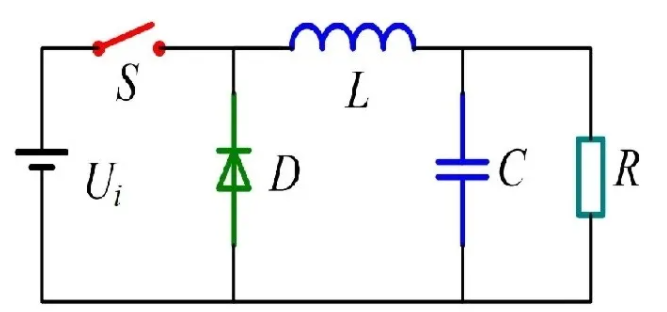
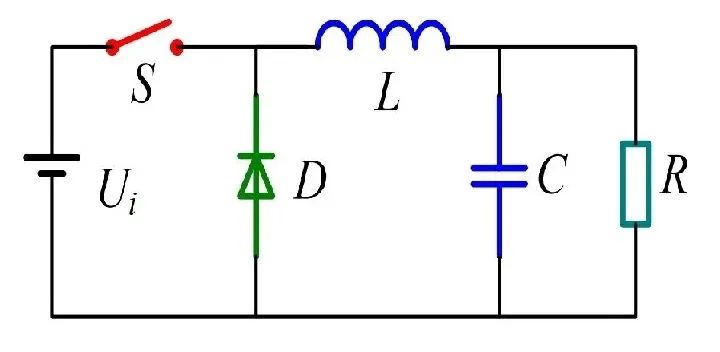
圖1
如圖1,異步BUCK由輸入電容C1、開關管Q1、儲能電感L1、輸出濾波電容C2、續流二極管D1和負載組成。
為了后面公式計算,我們在這里定義參數,文中均統一:輸入電壓Vin、輸出電壓Vout、電感電流IL、電感電壓VL、導通時間Ton、截止時間Toff、電感值L、開關頻率fs、占空比D、開關周期為T
電路工作時,由PWM信號控制開關管Q1導通和關閉;在開管Q1導通時,續流二極管不導通,輸入電壓Vin給電感L1儲能,由濾波電容穩壓;我們知道電感阻礙電流變化,根據楞次定律可知電感升壓公式,電壓VL=L*di/dt;此時電感兩端電流VL=Vin-Vout,因此電感電流的變化率di/dt=L/(Vin-Vout);可知Q1導通時電感電流是線性增加的,斜率為L/(Vin-Vout),是一個常數;
Q1關閉時,電感中儲存的能量通過續流二極管D1形成回路給負載繼續供電;電感需要釋放存儲的能量,此時電感產生反電動勢使得續流二極管導通,續流二極管的負極電壓為-Vd(電感左邊節點),而電感右邊節點是Vout,因此電感兩端電壓VL=-Vd-Vout,同理,電感電流的變化率di/dt=L/(-Vd-Vout);可知斜率是負的,電感電流線性減小。
開關電壓、電感電流、開關電流以及二級管電流如下圖所示:
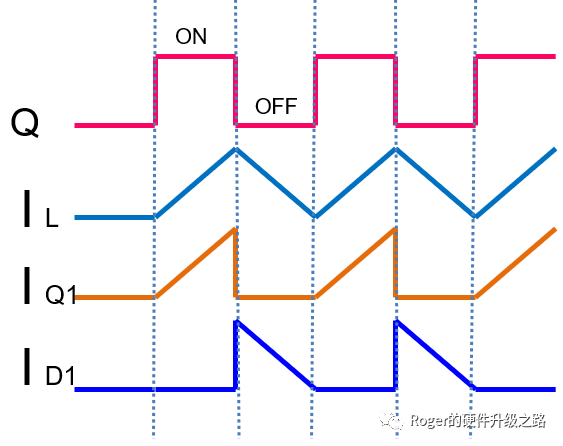
圖2
2、同步Buck
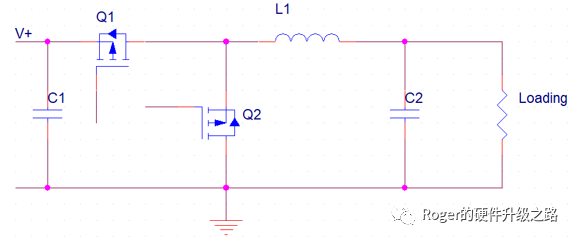
圖3
如圖3,同步Buck由兩個MOS開關、儲能電感、以及輸出濾波電容組成,電路工作時,由PWM信號控制兩個MOS管輪流交替導通,從而控制電感充放電,可以看出,與異步Buck架構區別是同步Buck使用MOS開關替代續流二極管。
在PWM信號周期中,當Q1導通,Q2斷開,輸入電流從Q1到電感充電,電感電壓為VL=Vin-Vout,電感電流線性增加;
當Q1斷開,Q2導通時,電感通過電容與Q2形成放電回路,此時電感電壓為Vout。
同步Buck的充放電過程的計算與異步Buck類似,對應的電感、MOS電壓、電流波形此處不再贅述。
3、同步Buck優缺點
優點
①毫無疑問,同步Buck的效率高是其最大優點,異步Buck在續流器件的損耗是IaVd(平均電流與導通壓降相乘);而同步Buck的續流損耗來源于MOS的Rdson,一般都是幾毫歐~幾十毫歐,按照I2R計算損耗也是遠遠小于異步Buck;
②一般MOS都是集成在芯片內部,不需要額外的PCB面積,Layout工程師最愛。
缺點
①為了防止上下管同時導通的情況,需要對死區時間做控制,設計會比較復雜。
②同時,由于MOS價格比二極管高,而且需要控制電路,所以成本高。
二、脈寬調制方式
開關電源是按照一定的開關模式,不斷開啟和關閉開關,即對應的調制模式,一般有PWM、PFM、PWM-PFM三種調制模式。
1、PWM調制
PWM是脈沖寬度調制(Pulse Width Modulation),信號頻率固定,改變的是占空比;PWM模式由誤差放大器、鋸齒波和比較器構成,誤差放大器將輸出反饋電壓FB與基準電壓差值放大,產生比較器需要的參考Vref電壓;信號發生器產生固定頻率的鋸齒波;比較器輸入為鋸齒波和參考電平Vref,輸出為VCC(開啟電壓))和GND;而通過改變參考電壓Vref,即可改變占空比,如下圖:
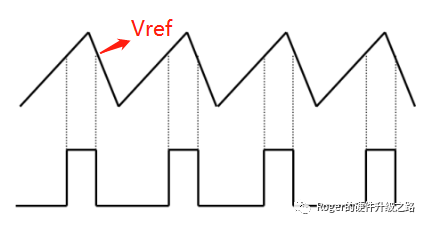
圖4
PWM模式開關頻率由鋸齒波信號決定,占空比由前端反饋的誤差電壓信號決定,在重載工況效率比較高,輸出紋波頻率穩定,因此比較容易設計濾波電路。
但是在輕載工況下,效率較低,由于誤差放大器的影響,在具有快速瞬態響應和高穩定性要求下需要有較好的補償網絡設計。
2、PFM調制
PFM是脈沖頻率調制,信號占空比固定,改變的是信號頻率。當電壓輸出電壓較高時,關閉輸出,輸出電壓較低時導通輸出。
PFM模式靜態功耗小,在不同工況下均有良好的效率,不過由于頻率不固定,輸出濾波器設計難度大,有EMI問題,紋波較大,而且可能會有頻率導致人耳能聽到的噪音。控制電路相比PWM更加負載,成本較高。
三、芯片內部架構
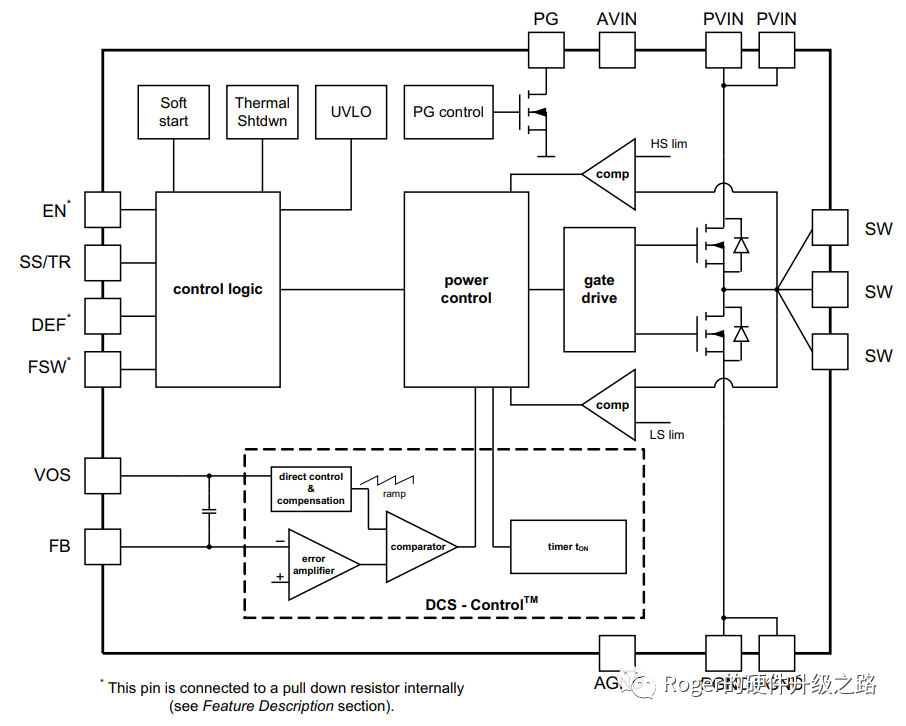
圖5
如上圖是TI的TLV62130RGTR,從規格書里面截取的芯片內部框架,不同廠家的設計大同小異,以此為例:
1、功率模塊
功率模塊主要由上下MOS管、MOS管驅動搭配外圍電路的輸出儲能電感、濾波電容、自舉電容等組成。
2、反饋比較模塊
反饋比較模塊包含電壓比較控制和電流控制,電壓反饋是提取反饋電壓FB與誤差放大器的基準電壓做差值放大,從而控制開關信號,從而穩定輸出電壓,同時某些芯片也會做輸出過壓/欠壓保護;
電流反饋控制是用來做過流保護,同時也可以用來檢測電感電流是否過零點,判斷芯片是否進入輕載高效模式。
說到反饋比較模塊不得不提到帶隙基準,作為誤差放大器的基準參考源,是由正溫度系數和負溫度系數的電路構成的基準電壓,不受電壓和溫度影響,僅由BJT/MOS的尺寸決定,主要是為其他電路提供穩定準確的參考源。詳細原理請參考《模擬電子技術第六版-康華光版》第七章第一節關于電流源的講解。
3、欠壓保護
為了避免芯片工作在較低電壓導致芯片異常,通常芯片會做輸入欠壓保護機制,當輸入電壓低于保護點時,芯片不進入工作狀態。通常是使用遲滯比較器設置門檻保護點,從而控制開關邏輯。
4、過壓保護
為了避免芯片工作在過高電壓下工作導致芯片損壞,輸入過壓保護使芯片輸入電壓高于某一電壓值時,芯片會關斷輸出進入過壓保護狀態,輸入電壓恢復到保護點以下再正常輸出,不過如果輸入電壓過高,即使關斷輸出芯片也可能會損壞。
5、過流保護
為了避免SW引腳輸出大電流損壞芯片,芯片會檢測SW的最大電流,當Ipeak觸發過流保護點,芯片會關斷輸出,輸出電壓會下降;有些芯片會限制Ipeak值,那么在負載增大時,電壓也會下降。
6、過熱保護
為了避免芯片由于溫度過高損壞,當溫度達到芯片保護點時,會觸發熱保護機制,關斷SW引腳輸出,溫度降低后再恢復。一般是利用BJT的Vbe溫度特性和施密特觸發器來設置保護點,從而控制開關邏輯。
7、軟啟動
軟啟動是用來控制芯片開始工作時輸出電壓的上升時間,測試取10%90%輸出電壓的上升時間,一般在500us10ms;可以保證系統容性負載較大的情況下,減小沖擊電流保護芯片;部分芯片軟啟動時間可以通過硬件/軟件修改,有的是固定不可調的;
8、EN使能
一般是控制EN引腳來控制芯片是否工作,本質是一個施密特觸發器,使能電壓高于門限電壓,芯片工作。通常為了調節系統電壓時序,可以通過調節并聯電容調節時序。
四、外圍電路
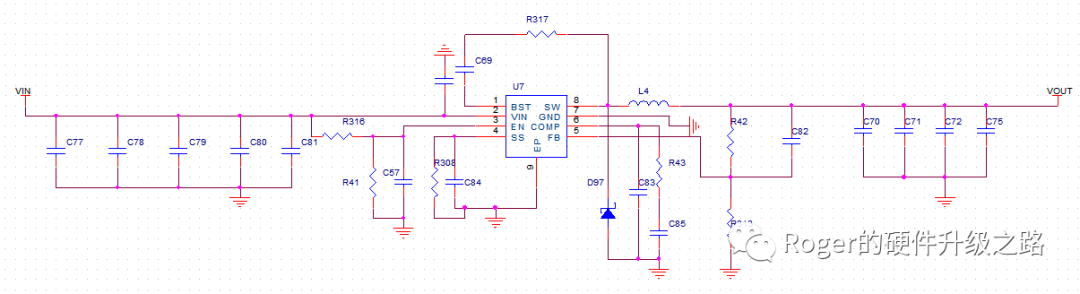
圖6
如上圖,是某Buck芯片的應用電路設計,外圍電路包含以下:
1、供電輸入
VIN輸入腳需要保證不管芯片在什么狀態下,輸入電壓都不得大于最高工作電壓的80%,輸入主要是輸入電容,輸入電容容值根據輸入紋波電壓、輸出紋波電流等要求做計算,詳細計算后文單獨討論;一般由低ESR的MLCC電容大小搭配,以減小等效ESR,并改善輸入噪聲;如上圖C77、C78、C79、C80、C81,電容盡量靠近芯片引腳,尤其是高頻電容。保證輸入-芯片-功率地路徑最短,一般鋪銅走線。
2、自舉電路
NMOS主回路電流是D到S極,導通條件是Vgs大于開啟電壓Vth,主回路是S極到D極,導通條件是Vsg小于Vth;因此一般將PMOS作為上管,VIN接S極,G給低電壓即可導通,而NMOS作為下管,S極接地,只要給G極一定的電壓即可導通;
但是現在很多芯片是用NMOS作為上管,此時上管S極已經是VIN,則需要G極大于VIN;此時就需要自舉電容,利用電容兩端電壓不能突變,抬高G極電壓,保證上管導通。如上圖C69
為了改善EMI問題,通常會預留串接Rboot,如圖R317,前文已提過改善Buck的方法。
3、使能電路
如圖R316、R41構成分壓,可以調節上下電時間;同時增加C57和R316構成RC延時,可以減緩系統上電,在對時序要求比較高時可以通過調節電容來微調時序。
有的同學在設計時是直接把VIN接到使能腳,需要注意的是要看芯片規格書,有些芯片內部的使能腳是有穩壓管的,就不能直接接到VIN;
也有要求芯片上電時序軟件可控,則可以把EN連接到主控,使用軟件控制。
綜上,EN腳一般有幾種控制方式
①EN直接懸空,芯片帶有float to enable功能的則會內部上拉接到VIN
②通過主控的GPIO控制
③電阻分壓控制
④RC延時控制
⑤多電源協作,比如使用5V來使能3.3V的EN
4、取樣電路
DCDC芯片反饋網絡一般由兩個分壓電阻構成,如圖R42、R313,Vout通過電阻分壓輸入至芯片的FB引腳,此引腳是接到芯片內部的誤差放大器,與基準電壓作比較,從而實現占空比控制。
兩個電阻值大小會影響功耗、響應速度和噪聲敏感度,應該與規格書取樣電阻值相近。
部分系統為了降低整機功耗,通常會采用SVB技術,即動態調壓技術,在芯片上電過程中,對滿足場景的電壓值進行微調,從而降低功耗。如下圖:
R377和C323構成RC積分電路,將主控的PWM信號積分成直流電壓
R377要遠小于R376,否則會影響電壓調節范圍
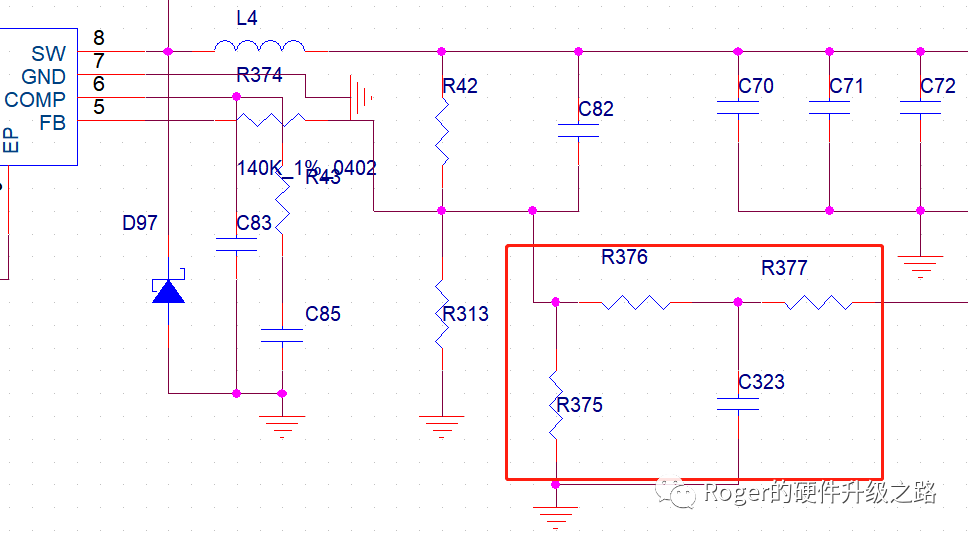
圖7
FB信號經過取樣電阻后比較敏感,因此走線一定要避開干擾源如SW信號或其他高頻信號。
5、前饋電容
如圖C82電容,如果電路沒有此電容,反饋網絡由上述分壓電阻組成,當增加前饋電容后,反饋網絡引入一對低頻零點和高頻極點,可以提升電源的帶寬和響應速度,在針對后級突然負載增加造成電壓跌落的情況,可以合理使用此電容。不過前饋電容的增加會惡化環路的相位裕量,因此需要測試環路穩定性。
6、RC吸收
前文提過的RC吸收電路,抑制開關的電壓浪涌,改善系統EMI,上圖電路沒有添加,一般是RC加在SW引腳對地。
7、補償電路
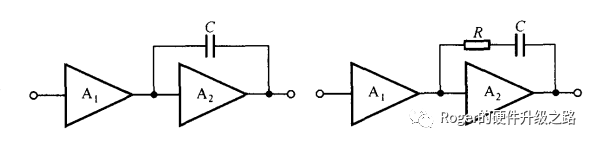
內部運放的輸入和輸出端需要有阻抗形成負反饋網絡,可以使用電容或者電阻加電容,改變穿越頻率點,破壞自激振蕩條件,有利于環路穩定性。
8、輸出LC
輸出電感儲能放電,與濾波電容構成Buck的基本拓撲,不做詳述。
**9、其他
**
部分芯片有調節開關頻率、IIC程控等功能
本文講了Buck基本原理、調制方式、芯片內部模塊以及外圍電路等內容,僅冰山一角,待持續更新。
-
二極管
+關注
關注
147文章
9706瀏覽量
167577 -
PWM
+關注
關注
114文章
5198瀏覽量
214889 -
電感電流
+關注
關注
0文章
88瀏覽量
11121 -
信號控制
+關注
關注
0文章
40瀏覽量
9231
發布評論請先 登錄
相關推薦
PWM的基本原理
SPWM的基本原理
占空比與脈寬調制(PWM)基本原理
無線充電的基本原理是什么
PWM的基本原理是什么
OLED驅動的基本原理及驅動方式
脈沖寬度調制PWM的基本原理控制方式是什么
脈寬調制的基本原理及其應用實例
光調制器的基本原理
Buck電路的基本原理,Simulink模型的獲取方式
Buck電路的基本原理
Vienna整流電路的基本原理和調制方式





 工商網監
工商網監
評論