") 一個簡單的線激光控制電機驅(qū)動電路分享
一個簡單的線激光控制電機驅(qū)動電路分享
本文介紹了一個簡單的線激光控制電機驅(qū)動電路,該電路通過響應(yīng)由線激光水平儀設(shè)備生成的精密水平激光線來工作,并以極其完美和精確的方式自動調(diào)整連接工具或工作工作的對齊方式。
什么是線激光
線激光設(shè)備實際上是一種先進的激光發(fā)射設(shè)備,可以產(chǎn)生360°高精度照明水平激光線,為所有工業(yè)或建筑工程工作提供校準參考,使工作的最終結(jié)果完全筆直和對齊,沒有絲毫誤差。
該電路是由本博客的一位忠實讀者Rafal先生要求的。
關(guān)于線激光控制電機工作程序的詳細討論可以從以下段落中了解到:
設(shè)計目標
先生。 拉法爾:我對此很陌生。在過去的幾周里,我做了一些研究,但還沒有找到我需要的東西。
我將不勝感激任何幫助。我附上我的想法的照片。我想用激光水平儀控制兩個 12 V DC 電機。
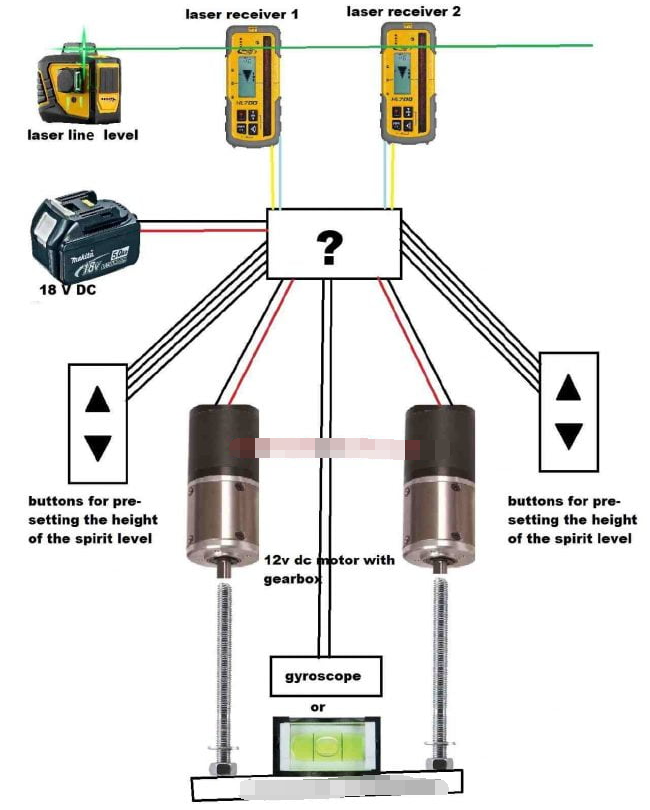
然后,該信號必須控制 12 V 直流電機的方向。電機來回旋轉(zhuǎn)螺紋桿以調(diào)整工具的高度。
根據(jù)我的發(fā)現(xiàn),將有幾個光電二極管并聯(lián)連接,一組用于檢測零電平以上的激光,另一組用于檢測該電平以下的激光。零電平只是光電二極管之間的某種停頓,以防止系統(tǒng)喚醒。不帶顯示屏的激光傳感器。我只給了一張圖片照片。
最初,我想使用上下按鈕設(shè)置連接到發(fā)動機的該梁的水平。如果第二個電機在設(shè)置陀螺儀時能與陀螺儀調(diào)平,我會很高興,但如果沒有 Arduino,這可能會非常困難。
我覺得我想要做的事情非常簡單,我可以不使用Arduino。由于建筑工地的困難條件,我堅持使用模擬,在我看來,電子設(shè)備越多,設(shè)備就越不可靠。
它只能在室內(nèi)工作,激光距離最大為10m。我一開始發(fā)現(xiàn)的電機電流消耗大,最大200mA,最大2.19A,但扭矩也很大。
從牧田電池為 18 V DC 供電。
提前感謝您的任何建議。
來自波蘭
拉法爾的問候
贓物:我對電機軸的工作感到困惑。兩個電機上的螺紋螺釘會推動工具,但無法將其拉回?這是怎么回事?
是否可以用單個電機實現(xiàn)相同的功能?
拉法爾先生:較低的水平直邊可能是 70 厘米,僅適用于小房間,例如廁所,以便您可以從門進入。
機器沒有驅(qū)動,手動拉動,只有調(diào)平直尺。在視頻中,桅桿上的兩個黃色物體是剛性連接到直邊上的激光探測器。
激光站在更遠的地方,它產(chǎn)生一條水平線。
電機將連接到推車和螺紋螺釘上,以使用激光探測器調(diào)平直邊。必須有兩個電機來調(diào)平兩側(cè),但這是一個鏡像。
我需要一個H橋電路,但我找到的所有電路都將與Arduino系統(tǒng)一起使用。如有必要,我可以以高達30美元的合理價格購買現(xiàn)成的橋梁
理想情況下,這將適用于紅色和綠色激光器,但波長如此不同,以至于我懷疑它是否可以完成,并且它不會在整個光譜上工作。
唯一常見的部分是雙通道H橋,就好像我是從現(xiàn)成的模塊和陀螺儀上做的一樣,但這是一個夢幻:)。
重要的是有用于左右電機旋轉(zhuǎn)的按鈕。
程序是這樣的。例如,我將激光懸掛在指定地板上方 2 m 處。我測量從激光束到直邊底部邊緣的 2 米。
我調(diào)節(jié)高度按下按鈕的開關(guān)左右,使其等于直邊的底部邊緣2米。我將探測器放在桅桿上,使激光束在光電二極管部分之間處于零水平。其余的會自己做
在附件中,我放了一張?zhí)綔y器操作的圖紙。
拉法爾
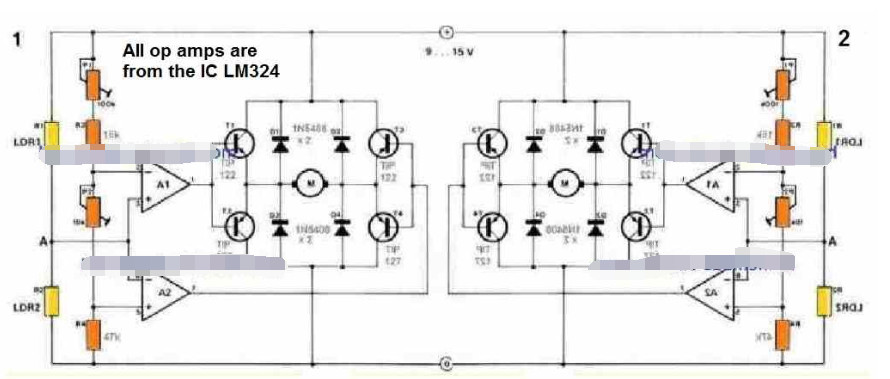
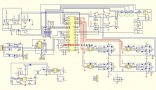
從上圖可以看出,需要兩個這樣的相同電路級來檢測和校正相關(guān)的電機控制工具相對于激光線直線度精度。
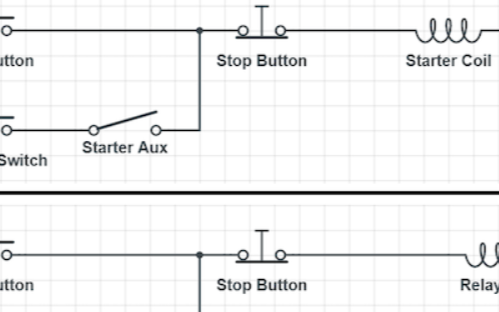
兩個相同的階段是彼此的鏡像,如下所示:
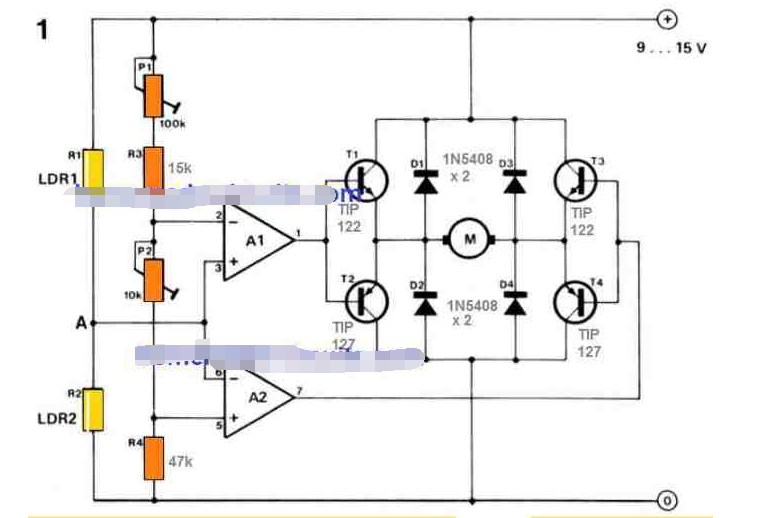
電路相當(dāng)簡單。它與窗口比較器配合使用,只要一對LDR以相同的激光線亮度曝光,就可以確保驅(qū)動電機不工作。
然后在A1的同相輸入和A2的反相輸入上產(chǎn)生一半的電源電壓。
一旦檢測到激光線的偏轉(zhuǎn)(如果電機控制工具未正確對齊,則可能會發(fā)生這種情況),影響LDR R1和R2的亮度就會發(fā)生變化。
在這種情況下,窗口比較器的輸入電壓漂移遠離電源電壓的一半。這種情況導(dǎo)致比較器輸出命令電機橋接網(wǎng)絡(luò)沿順時針或逆時針方向移動電機。
晶體管 T1 T4 的配置類似于橋接網(wǎng)絡(luò),可根據(jù) LDR 照明或激光線偏差角度在正向和反向方向上切換電機。
二極管 D1 D4的位置用于抵消電機在可用和運行期間產(chǎn)生的電壓峰值。預(yù)設(shè)電位計P1和P2的功能是便于校準調(diào)整。
這些經(jīng)過微調(diào),以確保只要相關(guān)的LDR對暴露在完全相同的激光亮度下,電機就會完全關(guān)閉和不活動。
例如,由于電機控制工具的未對齊,激光線傾斜導(dǎo)致LDR R2上的光比LDR R1上的光減少。這將導(dǎo)致A點的電壓上升到電源電壓的一半以上。
在這種情況下,A1運算放大器輸出變?yōu)楦唠娖剑仁咕w管T1和T4工作。這反過來又導(dǎo)致電機沿相關(guān)方向旋轉(zhuǎn)。此操作會自動沿直線移動連接的工具,直到其水平對準精度與激光線精度一致。
相反,如果我們假設(shè)工具以相反的方向傾斜,使得LDR的照明與上面討論的相反,則會導(dǎo)致A點的電壓降至電源電壓的一半以下。這種情況觸發(fā)輸出A2運算放大器變?yōu)楦唠娖剑筎3和T2開始工作。
這導(dǎo)致電機現(xiàn)在以相反的方向運行,試圖糾正工具在相關(guān)方向上的對齊,直到它變得完全筆直,與激光線的水平精度重合。
向上/向下按鈕
用于初始預(yù)設(shè)水平儀高度的向上按鈕可以通過將按鈕開關(guān)并聯(lián)到每個LDR來簡單地實現(xiàn)。
LDR 安裝
為了從LDR獲得正確的響應(yīng),左右對必須安裝在管狀外殼內(nèi),以便它們只能“看到”激光照明,而不能“看到”任何其他環(huán)境光。
下圖中可以看到這個想法:
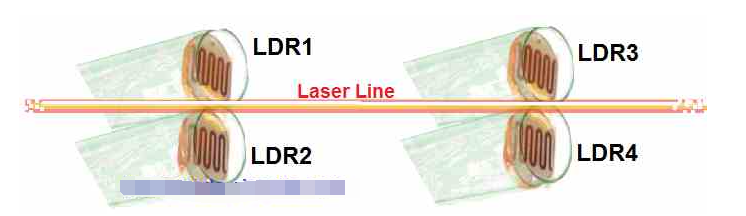
在這里,我們可以看到LDR的位置彼此非常接近,這確保了當(dāng)激光線位于精確的中心時,兩個LDR對的某些部分被激光均勻地照亮。
LDR外殼的前部可以用漫射透鏡覆蓋,以便激光照明可以均勻地擴散到相應(yīng)的LDR上。
-
電機驅(qū)動
+關(guān)注
關(guān)注
60文章
1227瀏覽量
86937 -
線激光
+關(guān)注
關(guān)注
0文章
14瀏覽量
6252 -
電機驅(qū)動電路
+關(guān)注
關(guān)注
1文章
17瀏覽量
7085
發(fā)布評論請先 登錄
相關(guān)推薦
基于電機的應(yīng)用制作一個8通道電機驅(qū)動器模塊電路
基于FPGA創(chuàng)建一個簡單的電機控制程序

如何編寫一個簡單的電機控制函數(shù)塊?
步進電機最簡單的驅(qū)動方法_步進電機控制方法
直流電機驅(qū)動控制電路設(shè)計

如何搭建一個基本的步進電機控制電路?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論