 foc電機控制算法的調試經驗總結
foc電機控制算法的調試經驗總結
本文分享foc電機控制算法的調試經驗,針對的場景是往一套新的控制板卡上移植一套電機控制軟件。
具體調試過程是 發波=>電流反饋=>環路=>角度
將調試過程分解為以下步驟。
- 確認pwm模塊正常
- 確認svpwm發波正常
- 確認電流反饋正常
- 引入電機角度
- 評估角度精度
下文中對移植調試的步驟分解,并給出每一個調試步驟的軟件框圖。
1、確認pwm模塊正常
1.1、確認母線電壓和實際測試值一致。
1.2、三相輸出懸空,三相輸出寄存器分別給固定占空比,測量各相對的波形,看是否和給定占空比一致。
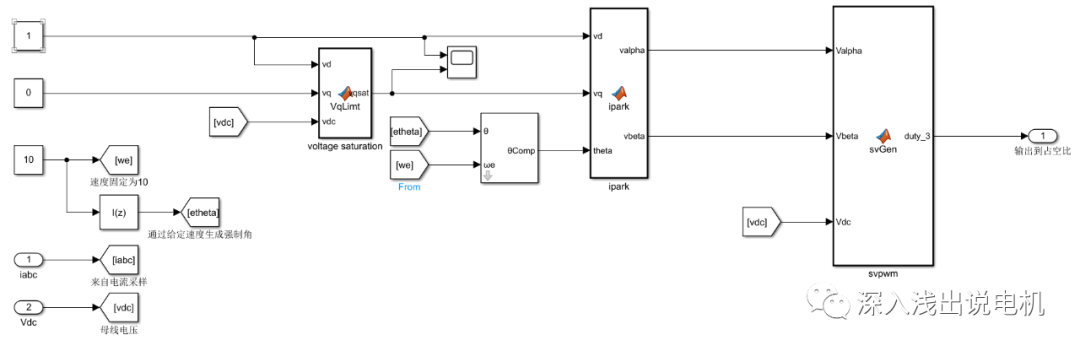
2、確認svpwm發波正常
2.1、連接電機或其他三相對稱負載。
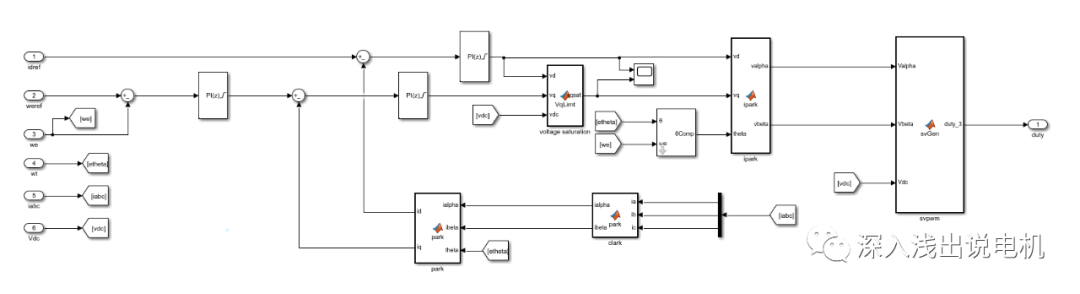
2.2、參考以下框圖,選取較低頻率,生成固定轉速強制角。給電壓到 ,對于把電機作為負載的工況,建議強制角頻率為10%額定速度或更低, 電壓設置為0, 電壓從小逐漸增加,看相電流波形,正常情況下電流波形應該為正弦波。另外需要注意的是,電壓不能給得過大,在低轉速下,電壓大部分產生電流,容易燒壞電機或驅動器。
3、確認電流反饋正常
3.1、軟件框圖如下,設置強制角固定為0度。給 電壓,當設置 時,應該有 ; ,其中 為電機相電阻。此處也可以使用采樣值和示波器測量值對比。需要注意的是,因為逆變器輸出有一定的非線性,在 較小時,實際輸出電流和電壓的關系可能是非線性的,通過上述方法計算的電流和實際輸出電流有誤差。
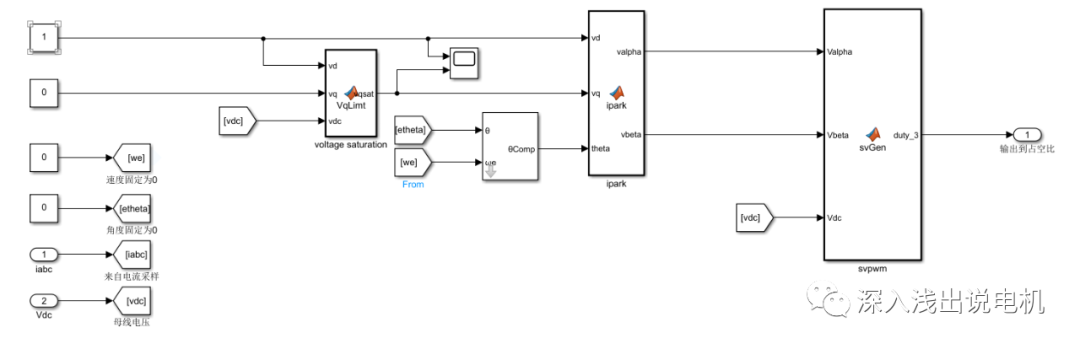
該方法可以校驗電流采樣是否正常,也可以用來辨識電流采樣的方向和 三相采樣通道。
修改強制角固定為120度,給 電壓,當設置 時,應該有 ;
修改強制角固定為-120度,給 電壓,當設置 時,應該有 ;
3.2、參考以下框圖,保持固定角度、啟用 電流環,令 軸參考電流 約20%額定電流,給 軸電流為0,確認 ,調節電流環參數確保電流上升速度,超調量滿足需求。
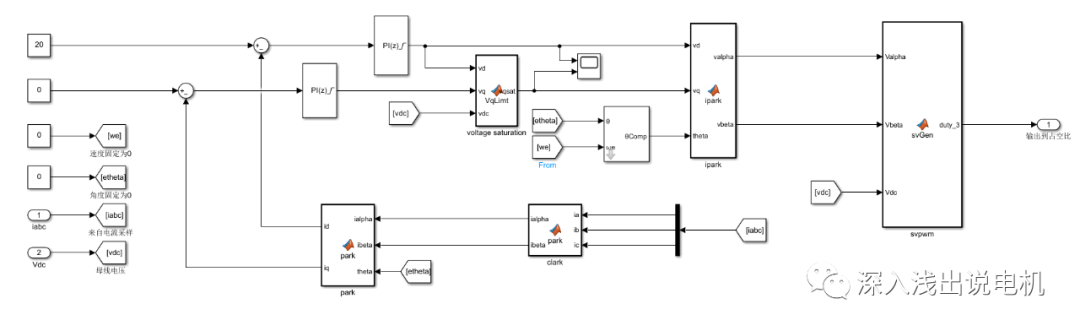
3.3、按照2.2方式給角度、啟用 電流環,給 軸參考電流約20%額定電流,給 軸電流為0,確認電機正常旋轉,并確認實際輸出電流為幅度等于給定電流大小。
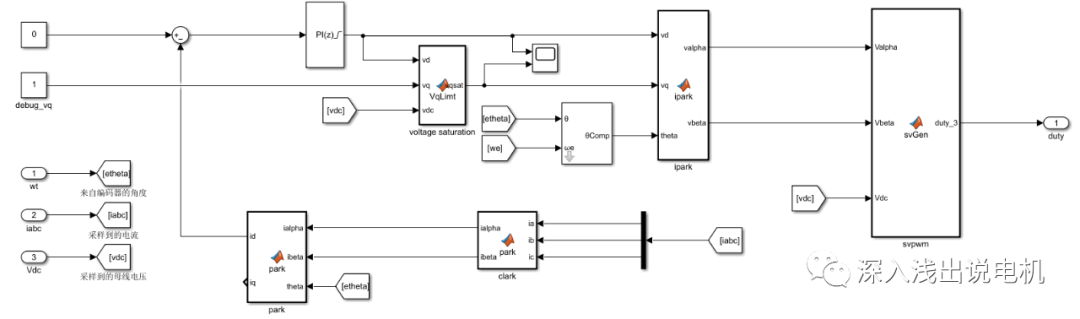
4、引入電機角度
4.1、保持3.3的發波方式,通過無傳感器估算算法或編碼器獲取速度,角度,確認3.3中的強制角和給定速度近似于估算速度角度或編碼器獲取的速度角度。
4.2、參考以下框圖,將估算速度角度或編碼器獲取的速度角度引入環路,保持 控制,關閉 軸電流環,直接從小到大給 電壓,確認電機工作正常。
4.3、連接負載,使能 電流環,加入速度環,調試速度環參數。
到此,就完成了在新驅動器移植速度控制的全部調試流程。
5、評估角度精度
能夠把電機三相電路分解為勵磁電流和轉矩電流建立在準確知道轉子位置的前提下,如果轉子位置不準,程序中給定的轉矩電流不會全部產生轉矩,以下分享評估角度精度的方法。
同步電機電壓方程建立在角度信息準確的前提下,假設角度準確,電機參數準確, 軸電壓電流存在如下關系:
當電機工作在穩態工況時,電壓方程可以寫為以下形式:
考慮角度誤差
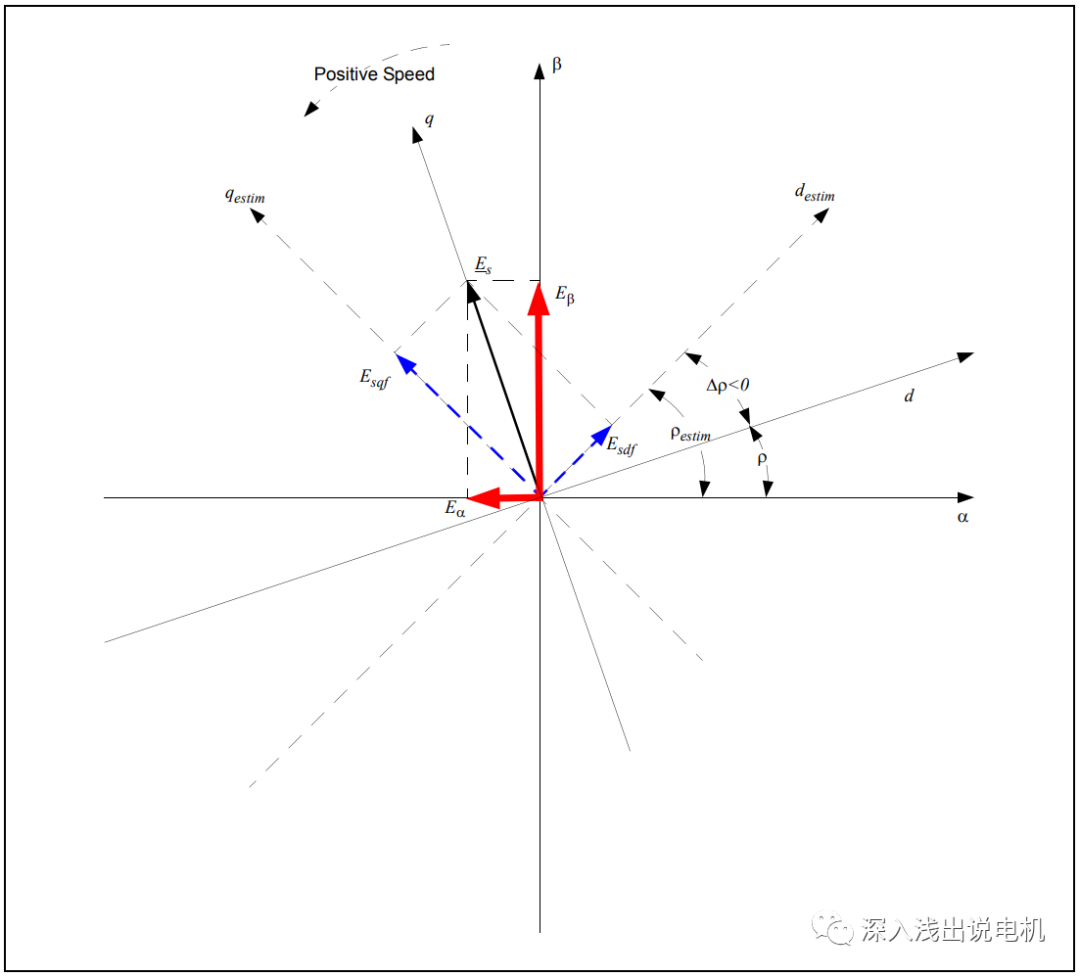
有
通過電流采樣及坐標變換得到 ,將 及電機參數,轉速帶入電壓方程,計算 軸估算電壓記作 , ,和程序中pi調節得到 對比,角度越接近真實角度$ , 和 越接近。
6、小結
本文分享了foc調試經驗,先確認驅動是否正常,再確認信號是否正常,最后調試環路。確保對整個系統有較好的把握,對每個環節都能夠心中有數。
-
電機控制
+關注
關注
3540文章
1897瀏覽量
269264 -
控制板
+關注
關注
5文章
255瀏覽量
31338 -
FOC
+關注
關注
20文章
325瀏覽量
42992
發布評論請先 登錄
相關推薦








 工商網監
工商網監
評論