 設計車載激光雷達 搞清這5點很重要!
設計車載激光雷達 搞清這5點很重要!
檢測距離
我們以自動駕駛汽車,防撞的應用來舉例。最小目標:小轎車4.8m×1.8 m長。目標的反射率:取決于物體本身的性質(表面狀況)。這里不詳細討論,假設目標可以很好的反射。以汽車100公里/小時的速度來計算,不僅考慮以100 km/h速度行駛的車輛,還要考慮以相同速度反向行駛的另一輛車輛。因此,雷達系統需要能夠檢測到200公里/小時的物體,也就是每秒相對運動至少50m。
當然,還要考慮,如非線性速度、停車距離、規避動作等復雜情況。所以一般說來,高速應用需要激光雷達系統檢測更遠的距離。
視場角(FOV)
對于不同的應用,不同的環境,視場角的選擇也不一樣。
如上圖:對于自動駕駛車輛和自動地面車輛的對象檢測和防撞等應用,可以使用16像素FOV。在大客車應用中,可以用4× 4網格矩陣,以檢測系統周圍的物體,作為車輛的安全器件。
從FOV到角度分辨率
確定FOV之后, 我們可以計算相應的分辨率。FOV可以分為垂直FOV(VFOV)和水平FOV(HFOV)
當激光二極管陣列選定之后,比如下圖,一行16個激光二極管組成一個陣列,每個像素尺寸2mm×0.8mm, 20mm焦距的鏡頭。
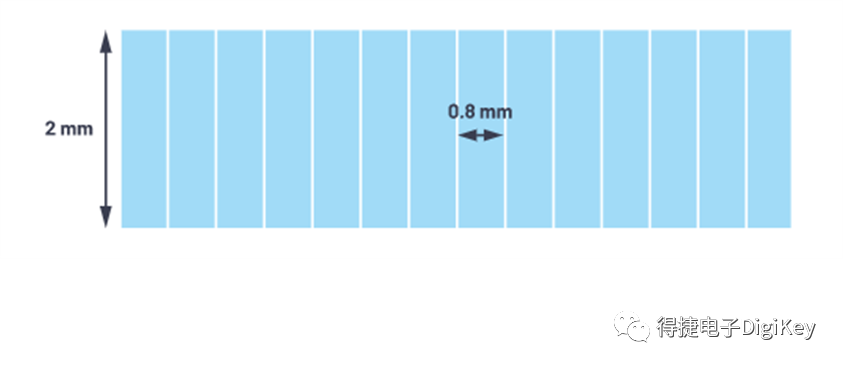
圖 2. 激光二極管陣列 (圖片來源于ADI)
于是,可以利用三角函數可以計算每個像素對應的VFOV與HFOV
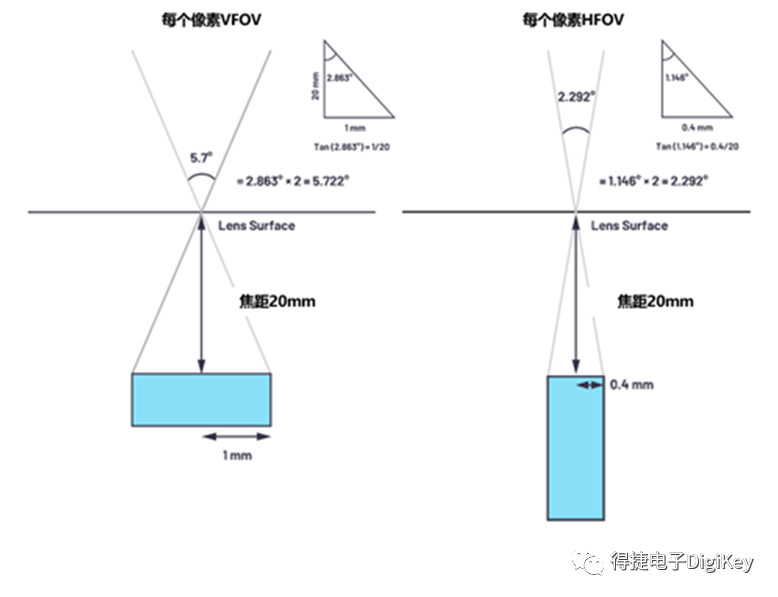
圖 3. VFOV 與 HFOV 計算 (圖片來源于ADI)
因此,根據三角函數我們可以得出每個像素,VFOV=5.7°,HFOV=2.292°
有了VFOV/HFOV, 我們就可以得知在某一特定距離,實物尺寸與相素的關系。
角度分辨率
換一個場景,假設FOV=1°,即1°角度分辨率,在200 m距離時,
一個像素點,對應于2×Tan(0.5°)×200m=3.5m長的物體。
即1°角分辨率會轉換成每側3.5米像素。
對于4.8m×1.8 m小轎車來說,很難檢測。
相比FOV=0.1°,即0.1°角度分辨率,在200 m距離時,
一個像素點,對應于2×Tan(0.05°)×200m =0.35m長的物體。
對于一個4.8m×1.8 m長的小轎車,在200 m距離時,至少可以有5個像素寬度的成像。
精細的角度分辨率使車載雷達系統能夠從單一對象接收多個像素的返回信號。因此,在這個系統下,甚至有可能區分汽車和摩托車。
距離精度與最小信噪比(SNR)
距離(或深度)、精度都與ADC采樣速率相關。距離精度允許系統準確地知道一個物體有多遠。對于移動的應用來說,非常重要。假設ADC采樣周期Δt 為1 ns采樣時段, 我們可以計算距離
d=(c×Δt)/2 = 15cm
c是光速
即使用1 GSPS ADC的距離精度可達到15 cm。
當然可以采用更復雜的技術(例如過采樣插值)來改善范圍測量精度。
據估計,大約可以將范圍測量精度提升SNR的平方根。匹配濾波器是用于處理數據的性能最高的算法之一,它可以在插入之后最大化SNR,以得出最高的范圍測量精度。
激光雷達系統拓撲結構
以ADI的方案為例:
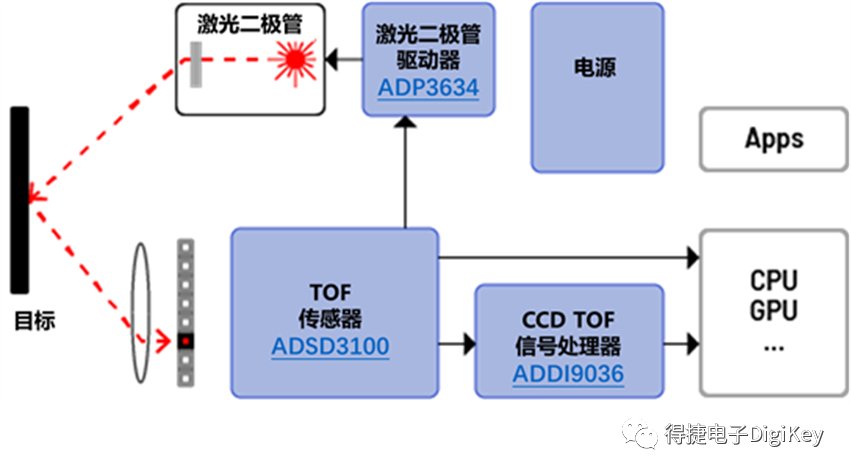
相關產品:
Digi-Key ADDI9036 開發板AD-FXTOF1-EBZ,AD-96TOF1-EBZ
激光二極管驅動器 ADIADP3634
 ?更多激光設計的技術信息,請查看以下內容:
?更多激光設計的技術信息,請查看以下內容:-
選擇激光器件時要注意什么?
-
飛行時間技術概述
-
為何及如何將氦氖激光器用于工業和科學應用
-
使用安全激光掃描儀保護危險工業工作區域中的操作人員
- 比較激光掃描儀應用
?
?最后,如果你喜歡這篇文章,快分享給更多的小伙伴吧!切記點個贊哦!
提示點擊菜單設計支持:工程師錦囊,獲取更多工程師小貼士
秘技知識學不停 專屬福利享不停
就等您加入!
點此登記
賺積分、換好禮
立即到「會員權益」查看您的禮遇! 如有任何問題,歡迎聯系得捷電子Digi-Key的客服團隊中國(人民幣)客服
 400-920-1199
400-920-1199 服務支持 > 聯系客服 > 微信客服
服務支持 > 聯系客服 > 微信客服 service.sh@digikey.com
service.sh@digikey.com QQ在線實時咨詢:4009201199
QQ在線實時咨詢:4009201199
中國(美金)/ 香港客服
400-882-4440
852-3104-0500china.support@digikey.com

點擊下方“閱讀原文”查看更多
讓我知道你在看喲
原文標題:設計車載激光雷達 搞清這5點很重要!
文章出處:【微信公眾號:得捷電子DigiKey】歡迎添加關注!文章轉載請注明出處。
-
得捷電子
+關注
關注
1文章
255瀏覽量
9055
原文標題:設計車載激光雷達 搞清這5點很重要!
文章出處:【微信號:得捷電子DigiKey,微信公眾號:得捷電子DigiKey】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
CES 2025激光雷達觀察:“千線”激光雷達亮相,頭部廠商布局具身智能

禾賽拒絕“激光雷達無用論”

一則消息引爆激光雷達行業!特斯拉竟然在自研激光雷達?
智能駕駛浪潮下,車載激光雷達行業深度剖析與未來展望
激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術的基于深度學習的進步
如何提升激光雷達數據的精度
禾賽科技持續領跑全球激光雷達市場
光學雷達和激光雷達的區別是什么
激光雷達點云數據包含哪些信息
中國激光雷達廠商引領全球車載市場:禾賽獨占鰲頭,華為位列前五
一文看懂激光雷達

基于FPGA的激光雷達控制板

激光雷達的探測技術介紹 機載激光雷達發展歷程






 工商網監
工商網監
評論