 介電潤濕液體透鏡仿生復眼的設計與仿真
介電潤濕液體透鏡仿生復眼的設計與仿真
自然界中昆蟲復眼是天然存在的多孔徑曲面光學系統,具有視場大、體積小、靈敏度高、對運動物體敏感,且能夠實時對進行圖像分析和處理等優點。模擬昆蟲復眼設計和制作的仿生復眼系統在照明系統、工業檢測、自主導航、醫學、安防設備等領域都具有廣闊的應用前景與良好的發展潛力。因此,有關仿生復眼系統的研究引起了國內外科研工作者的廣泛關注。然而,現有的仿生復眼系統大多是采用固定焦距的子眼透鏡陣列,一旦復眼系統的結構確定,系統的成像焦平面隨之確定,即只能對景深范圍內物體進行清晰成像,不利于對景深范圍外目標物的探測和接收。
為解決這一問題,可變焦仿生復眼系統應運而生。南京郵電大學電子與光學工程學院微流控光學技術研究中心梁忠誠教授團隊設計了一種基于介電潤濕液體透鏡曲面陣列的仿生復眼光學系統,運用介電潤濕液體透鏡的自適應變焦能力,解決由于物體或者系統成像接收器移動造成的系統離焦像差;分析曲面基底的曲率半徑及液體透鏡子單元的尺寸對系統成像質量的影響,計算系統接收器可移動范圍。結果表明:系統成像的視場角隨著基底曲率的增大而增大。相比于非均勻透鏡陣列,均勻透鏡陣列可明顯降低系統的離焦像差。適當減小子透鏡單元尺寸,也可以達到降低邊緣透鏡離焦像差的目的。當物距或者接收器位置發生改變時,通過調整子透鏡單元焦距降低系統的離焦像差。系統接收器可移動范圍為 1.9 mm~15 mm。相關研究將推動仿生復眼系統的應用發展,也為合理利用液體透鏡提供理論依據。
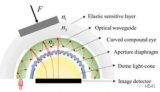
基于液體透鏡的仿生復眼光學系統主要由雙液體透鏡、曲面基底、光闌和平面探測器組成,如圖1(a)所示。透鏡曲面陣列均勻排布如圖1(b)所示,分為4環(位于曲面基底正中心為第一環),環與環之間以及同一環子透鏡尺寸相同且緊密相切排布,則每環子眼透鏡的個數依次為 1、 6、 12、 18。該仿生復眼系統的子眼透鏡單元為基于介電潤濕效應的雙液體可變焦透鏡,其結構如圖1(c)所示。子透鏡側壁由外到內依次為腔體、絕緣層和疏水層。其中透鏡的腔體和基底都采用導電 PET (polyethyleneterephthalate)材料,這種 PET 材料是涂覆有導電ITO(indium tin oxide)的柔性材料。絕緣層是通過在透鏡腔體上蒸鍍一定厚度的派瑞林(Parylene)來實現的,最后涂覆一層氟化聚合物作為疏水層。腔內為兩種密度相同且折射率不同的液體組合,其中上層液體為導電液體,下層為絕緣液體。根據Young-Lippman 方程,控制工作電壓可以改變雙液體界面曲率,調節液體透鏡子眼單元焦距,從而使得每個子眼透鏡單元成像于同一接收平面上。圖1(d)給出了仿生復眼系統的成像示意,物體經液體透鏡曲面陣列成像在探測接收器上。當物距或像距發生移動時,光線聚焦位置將偏離探測器接收面,此時只需調整工作電壓,改變子眼透鏡焦距,使得光線重新聚焦于探測接收器上。由于液體透鏡曲面陣列均勻排布,相鄰液體透鏡夾角(Δφ)相等,故可得第n環透鏡主光軸與透鏡陣列主光軸之間的夾角αn為αn=(n–1)Δφ,其中Δφ= 2arcsin(D/2R),整個復眼系統的視場角為2αn。
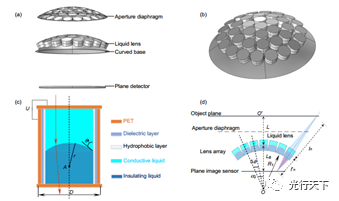
圖1.基于介電潤濕液體透鏡的仿生復眼系統設計原理(a)側面圖;(b)透鏡單元排列方式;(c)透鏡結構圖;(d)成像原理示意圖 不同視場下目標物字母“F”經不同曲率仿復眼系統的成像情況如圖2所示。從圖中看出,在正入射的情況下,基底曲率半徑越大,子眼透鏡成像越清晰。當視場角增大,基底曲率半徑越小,系統成像質量越好。這是因為在光學系統中,軸外光的成像質量比軸上光的成像質量差,且偏離主光軸越遠,成像越模糊。在正入射時,基底曲率半徑越大,各環子透鏡的光軸與入射光的夾角越小,子透鏡成像越清晰。當視場角逐漸增大,入射光線與各環子透鏡光軸的夾角逐漸變大,成像質量逐漸變差。此時,若減小基底的曲率半徑,可降低入射光與各環子透鏡光軸的夾角,從而達到提高成像質量的目的。因此,在復眼透鏡基底曲率半徑的選取上,既要考慮正入射的情況,也要兼顧系統在不同視場角下的工作性能。
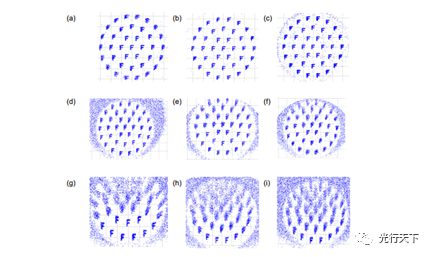
圖2.不同視場情況下,不同曲率仿復眼系統的成像效果。(a) R1=10 mm,正入射;(b) R2=15 mm,正入射;(c) R3=20 mm,正入射;(d) R1=10 mm,視場角 20°;(e) R2=15 mm,視場角 20°;(f) R3=20 mm,視場角 20°;(g) R1=10 mm,視場角 35°;(h) R2=15 mm,視場角 35°;(i) R3=20 mm,視場角35° 曲面基底的曲率半徑和各子透鏡位置保持不變,子眼透鏡直徑分別取 1 mm、 2 mm 和 3 mm時,復眼系統的成像效果如圖3所示。從圖中可以看出:當透鏡直徑增大至 3 mm 時,第三環子眼透鏡對應成像模糊不清。本文認為隨著透鏡尺寸變大,對應子眼透鏡的 F 數()降低,減小了焦深,從而增加了系統對離焦的敏感性。因此,在保證系統成像分辨率的前提下,盡可能減小子眼透鏡尺寸。
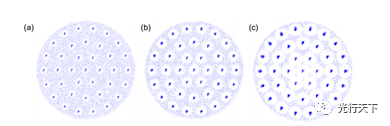
圖3.不同直徑透鏡單元對復眼系統成像效果的影響
在分析子眼透鏡單元均勻性對系統成像質量的影響時,非均勻子眼透鏡組成陣列的第一環子眼透鏡直徑為 1 mm,從里往外每環依次增加0.2 mm,第 6 環對應子眼透鏡直徑為 2 mm。均勻子眼透鏡單元組成的陣列,每環透鏡直徑均為1 mm,且每環子眼透鏡中心線與非均勻透鏡陣列相應的子眼單元中心線重合。調整每環液體透鏡焦距,使其聚焦于成像探測器上。從系統的成像光斑可以發現:相比于非均勻微透鏡陣列,均勻微透鏡子眼單元組成的曲面陣列可以明顯降低系統的離焦像差。
當物體固定不動時,由于子眼透鏡焦距具有可調性,系統接收探測器位置也可以根據實際需要進行一定范圍的調整。圖4給出了仿生復眼系統的成像接收器可移動范圍,其中圖4(a)為平行子眼透鏡光軸光線,在曲面基底球心處會聚一點,此位置為成像接收平面的最大位置,距離基底最高位置為 15 mm;調節液體透鏡工作電壓,改變液體透鏡單元的焦距,使得光線匯聚到圖 4(b)所示的接收探測器位置,此時液體透鏡接觸角已經達到飽和狀態,對應探測器位置為最小位置,距離基底是 1.9 mm。該系統的接收探測器位置變化范圍為 1.9 mm~15 mm。
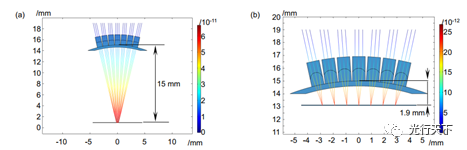
圖4.仿生復眼系統的成像接收面的接收范圍。(a)最遠接收位置;(b)最近接收位置 該工作得到了國家自然科學基金(61775102, 61905117)和基礎加強計劃技術領域基金(2019-JCJQ-JJ-446)的支持。
審核編輯 :李倩
-
探測器
+關注
關注
14文章
2653瀏覽量
73251 -
照明系統
+關注
關注
3文章
415瀏覽量
32984 -
光學系統
+關注
關注
4文章
244瀏覽量
18387
原文標題:介電潤濕液體透鏡仿生復眼的設計與仿真
文章出處:【微信號:光行天下,微信公眾號:光行天下】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
超透鏡的設計與分析
40VRMS至60VRMS鏡頭的HV892K7-G電感器液體透鏡驅動器
太陽能電池衍射透鏡設計與仿真
太陽能電池衍射透鏡設計與仿真
介電分析及其應用
一種仿生球面復眼系統的圖像拼接算法研究(SIFT圖像匹配)
一種基于仿生復眼的高密度陣列曲面三維觸覺傳感器
基于模板化去潤濕誘導的液體樣本離散化技術
液體鏡頭介紹
基于介電潤濕效應的疊加式液體透鏡波前校正
一文看懂石英玻璃復眼透鏡在激光應用中的優勢
揭秘液態透鏡的類型和工作原理
基于三維超球面的聲學復眼裝置,可用于全向寬帶信號增強






 工商網監
工商網監
評論