") ZMC408CE | 實(shí)現(xiàn)“8通道獨(dú)立PSO”應(yīng)用場景
ZMC408CE | 實(shí)現(xiàn)“8通道獨(dú)立PSO”應(yīng)用場景
1.高性能處理器,提升運(yùn)算速度、響應(yīng)時(shí)間和掃描周期等;
2.一維/二維/三維、多通道視覺飛拍,高速高精;
3.位置同步輸出PSO,連續(xù)軌跡加工中對精密點(diǎn)膠膠量控制和激光能量控制等;
4.多軸同步控制,多坐標(biāo)系獨(dú)立控制等;
5.EtherCAT同步周期可快至125us;
6.EtherCAT總線和脈沖軸混合插補(bǔ);
7.直線插補(bǔ)、任意空間圓弧插補(bǔ)、螺旋插補(bǔ)、樣條插補(bǔ)等;
8.應(yīng)用靈活,可PC上位機(jī)開發(fā),也可脫機(jī)獨(dú)立運(yùn)行;
ZMC408CE視頻介紹:https://www.bilibili.com/video/BV1E24y177za/
二、ZMC408CE產(chǎn)品簡介
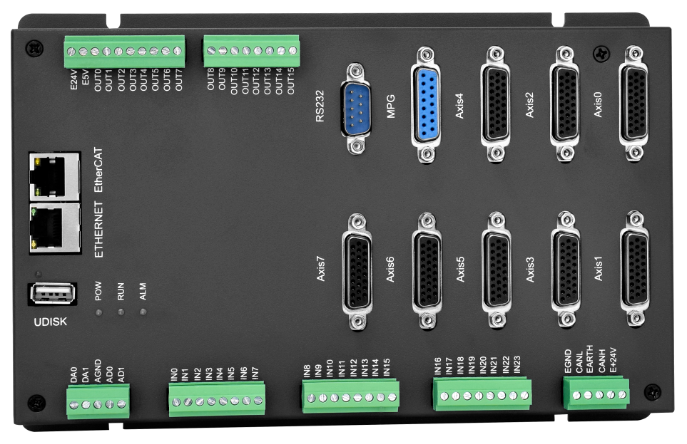
ZMC408CE
ZMC408CE是正運(yùn)動技術(shù)推出的一款高性能EtherCAT總線運(yùn)動控制器,核心技術(shù)采用了先進(jìn)的FPGA技術(shù),實(shí)現(xiàn)硬件位置比較輸出、精準(zhǔn)輸出功能,保證連續(xù)軌跡加工的出色性能和穩(wěn)定性,以及動態(tài)數(shù)據(jù)捕獲的實(shí)時(shí)性,從而實(shí)現(xiàn)更加精準(zhǔn)控制和提高生產(chǎn)效率和品質(zhì)。
ZMC408CE支持EtherCAT+脈沖軸混合插補(bǔ),可脫機(jī)或聯(lián)機(jī)運(yùn)行,軸數(shù)8-32軸可選,支持ZDevelop+多種高級上位機(jī)混合編程,可以實(shí)現(xiàn)點(diǎn)位運(yùn)動、電子凸輪、直線插補(bǔ)、圓弧插補(bǔ)、連續(xù)軌跡加工和30+種機(jī)器人模型的控制。
?軸數(shù)8-32軸可選;
?板載EtherCAT,CAN,RS232,RS485,EtherNet,U盤接口;
?板載24DI,其中4路高速色標(biāo)鎖存;
?板載16DO,其中8路硬件比較輸出PSO,8路高速PWM;
?專用的手輪輸入接口。
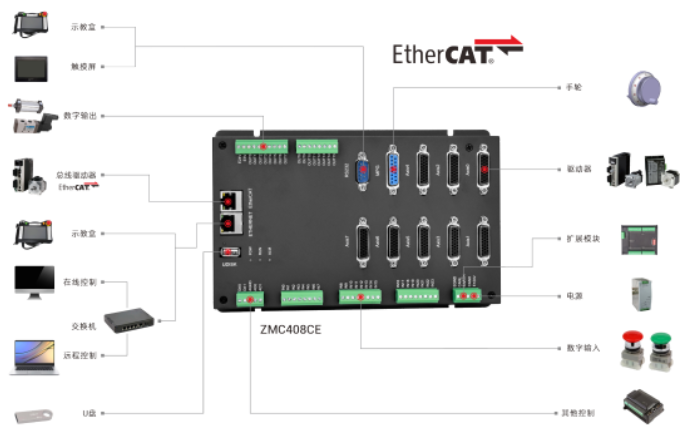
ZMC408CE架構(gòu)圖
三、控制器多維多通道PSO應(yīng)用
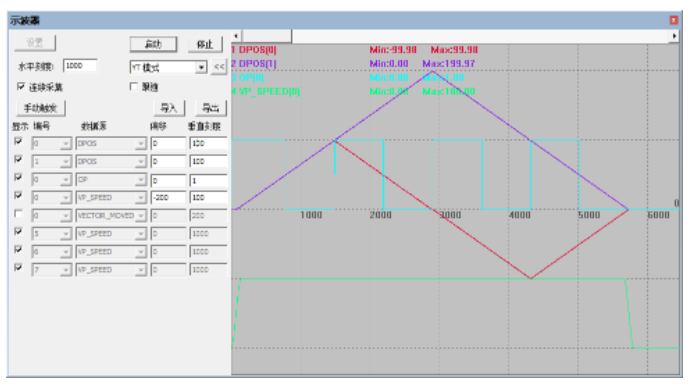
1.二維PSO輸出示意圖
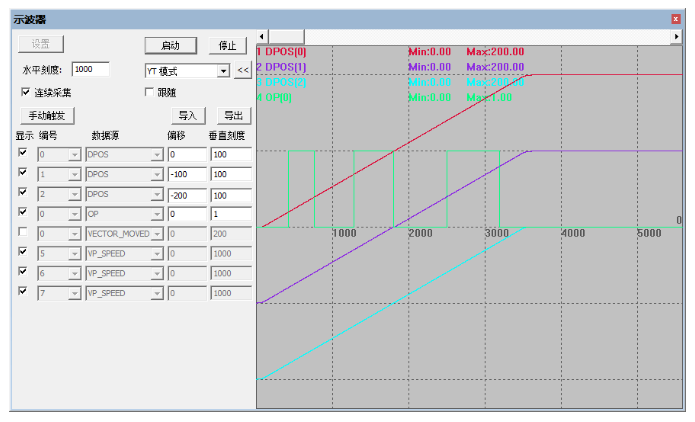
2.三維PSO輸出示意圖
四、控制器支持多種開發(fā)方式
PC上位機(jī)API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。
PC上位機(jī)開發(fā)語言
五、ZMC408CE應(yīng)用場景
適用于3C電子、半導(dǎo)體、新能源、光伏、汽車、醫(yī)療、點(diǎn)膠設(shè)備、流水線等領(lǐng)域的大型加工、裝配生產(chǎn)線上。
審核編輯黃宇
-
控制器
+關(guān)注
關(guān)注
112文章
16446瀏覽量
179458 -
PSO
+關(guān)注
關(guān)注
0文章
49瀏覽量
12976
發(fā)布評論請先 登錄
相關(guān)推薦
混合信號分析儀的原理和應(yīng)用場景
多蹤示波器的原理和應(yīng)用場景
請問ADS1299是8通道的還是4通道的?

模塊化儀器的技術(shù)原理和應(yīng)用場景
源測量單元設(shè)備的技術(shù)原理和應(yīng)用場景
PCM1864可以接8通道模擬輸入嗎?
多軸高性能EtherCAT總線運(yùn)動控制器ZMC408CE硬件介紹

EtherCAT運(yùn)動控制器在LabVIEW中的運(yùn)動控制與實(shí)時(shí)數(shù)據(jù)采集

IT6113: 高速M(fèi)IPI DSI 4通道轉(zhuǎn)8通道轉(zhuǎn)接芯片資料
EtherCAT運(yùn)動控制器在ROS上的應(yīng)用開發(fā)案例(上)

NanoEdge AI的技術(shù)原理、應(yīng)用場景及優(yōu)勢
EtherCAT運(yùn)動控制器在ROS上的應(yīng)用(上)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論