 為機器人安全限制電機運行范圍的簡單方法
為機器人安全限制電機運行范圍的簡單方法
在工業機器人領域,有幾種類型的機器人通常提供多軸運動來完成零件裝配、物料搬運或拾取和放置操作等任務。這些包括鉸接式機器人、笛卡爾/龍門式機器人、SCARA 機器人和 Delta 機器人。可以將各種末端執行器(例如夾持器、焊機或零件旋轉器)安裝在手臂的末端以執行不同的任務。根據軸數或負載能力,成本很容易增加。限制這些機器人運動軸的操作范圍是防止以后出現代價高昂的問題或安全問題的簡單方法。
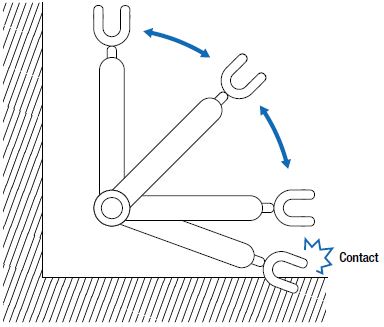
避免機械臂與其周圍環境接觸可能有助于防止代價高昂的產品損壞甚至人身傷害,同時保持生產正常運行時間。
|
在處理受限空間內的運動范圍時,可能很難避免機械臂撞到某物,尤其是在沒有復雜算法和視覺傳感器的情況下。根據力或速度等因素,這可能意味著對操作人員的傷害或產品損壞,這兩者都會增加生產成本并降低生產效率。 為了解決這個問題,必須使用外部限位傳感器來限制電機的運行范圍。這些需要額外的空間、專業知識、庫存和布線。 |
 |

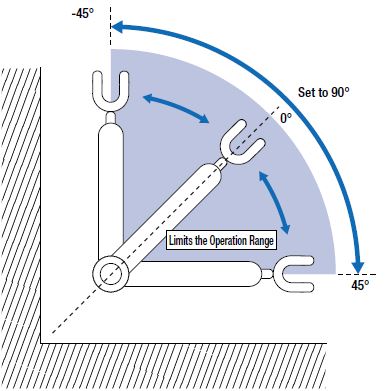
在電機和驅動系統中使用軟件限制參數,以步數、度數或毫米的形式防止電機在限制區域內運行。您還可以控制電機如何停止。

|
許多用于控制這些運動軸的電機系統(伺服、步進)通常提供軟件限位,可用于與外部限位傳感器相同的目的。當軟件限制設置并存儲在驅動器或控制器中時,電機將僅在安全區域內運行,不會造成傷害或損壞。 該參數通常包含在許多電機和驅動系統的軟件中。然而,許多機器設計人員仍然使用限位傳感器、編碼器和/或軟件限位的組合來實現多層保護。使用絕對編碼器時,可以取消外部傳感器,但需要額外的硬件(例如電池)來保留位置信息。 |
 |
|
當軟件限制與 一起使用時,可以消除額外的硬件,例如電池、編碼器和用于歸位或限制的外部傳感器。這確實有助于縮短設計周期并降低庫存要求。此外,在發生意外中斷(例如停電)后可以立即恢復操作,而無需先執行歸位操作,從而消除了生產延遲。 < >帶內置無電池機械絕對傳感器的電機 相關帖子: < >以絕對坐標運行的索引表 為了幫助解釋無傳感器絕對定位的優勢,我們使用 AZ 系列絕對步進電機構建了一些機器人演示,無需外部歸位或限位傳感器。 |

對于 Oriental Motor 的電機和執行器,軟件限制參數可以在. < >AZ系列 < >MEXE02支持軟件
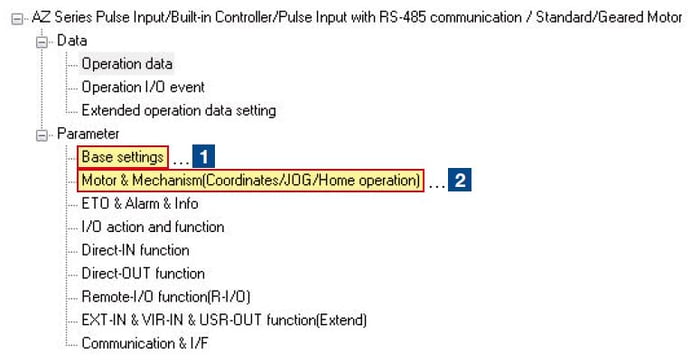
請參閱下面的屏幕截圖示例,以在 MEXE02 支持軟件中找到這些參數。下面的參數將允許機械臂(如上圖所示)在與水平位置(0 位置)成 45 度的起始位置時,在任一方向上移動 45 度。如果電機行駛到 +45 或 -45 度限制之外的設置限制,則電機將減速至停止,然后其驅動器將發出警報。
指示:
在 MEXE02 軟件窗口中,單擊參數下的基本設置。這是在左上角。請參閱下面的第一張圖片。確保您的單位設置為“度”。
在第 28 行為 POSITIVE SOFTWARE LIMIT 輸入“45.00”。
在第 29 行為 NEGATIVE SOFTWARE LIMIT 輸入“-45.00”。
單擊 PARAMETER 下 BASE SETTINGS 下的 MOTOR & MECHANISM。
確保在第 11 行的初始坐標生成和包裹坐標設置中選擇了“優先 ABZO 設置”。




就是這樣。哦還有一件事。請記住將數據寫入驅動程序以保存這些參數。這非常重要,除非您想再次重復此操作。
審核編輯黃宇
-
傳感器
+關注
關注
2553文章
51402瀏覽量
756612 -
機器人
+關注
關注
211文章
28643瀏覽量
208424 -
電機
+關注
關注
142文章
9084瀏覽量
146379 -
機械臂
+關注
關注
12文章
520瀏覽量
24725
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論