 如何實現雙輪差速底盤躲避懸崖的功能?
如何實現雙輪差速底盤躲避懸崖的功能?
1. 功能說明
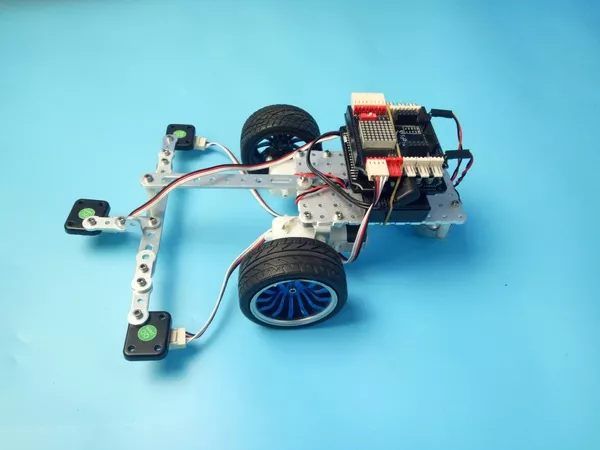
本實驗使用的樣機為R023樣機小型雙輪差速底盤。在樣機前方安裝3個近紅外傳感器 ,實現機器人躲避懸崖、在某平臺上移動時不會掉下去的效果。
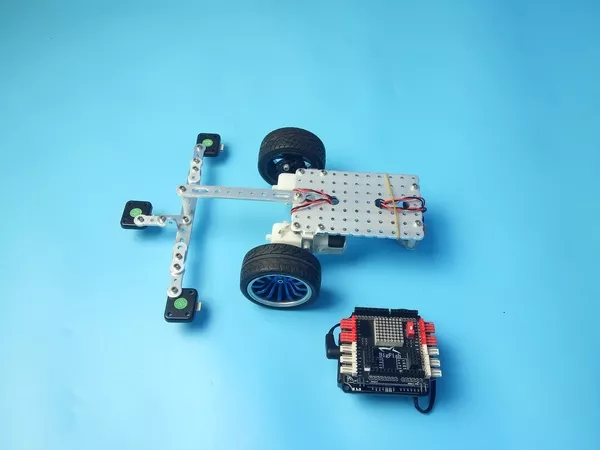
2. 電子硬件
在這個示例中,我們采用了以下硬件,請大家參考:
| 主控板 | Basra(兼容Arduino Uno) |
| 擴展板 | Bigfish2.1 |
| 傳感器 | 近紅外傳感器 |
| 電池 | 7.4V鋰電池 |
左輪直流電機連在D9,D10接口上;右輪直流電機連在D5,D6接口上;3個近紅外傳感器從左到右分別連在A0、A4、A3接口上。
3. 示例程序
編程環境:Arduino 1.8.19
編寫并燒錄以下程序(nine.ino),該程序將實現演示視頻中的動作【完整資料請參考https://www.robotway.com/h-col-113.html】
/*------------------------------------------------------------------------------------ 版權說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2023-02-10 https://www.robotway.com/ ------------------------------------------------------------------------------------*/ void Right(); void Left(); void Stop(); void Forward(); void Back(); void setup() { pinMode( 17, INPUT); pinMode( 18, INPUT); pinMode( 14, INPUT); pinMode( 10, OUTPUT); pinMode( 6, OUTPUT); pinMode( 5, OUTPUT); pinMode( 9, OUTPUT); } void loop() { if (((!( digitalRead(14)) && ! (digitalRead(17)) ) )) { Forward(); } if (( digitalRead(14) )) { Left(); delay( 300 ); } if (( digitalRead(17) )) { Right(); delay( 300 ); } if (( digitalRead(18) )) { Back(); delay( 1000 ); analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 100); delay( 1500 ); } } void Right() { analogWrite(5 , 0); analogWrite(6 , 0); analogWrite(9 , 100); analogWrite(10 , 0); } void Forward() { analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 100); analogWrite(10 , 0); } void Back() { analogWrite(5 , 0); analogWrite(6 , 100); analogWrite(9 , 0); analogWrite(10 , 100); } void Left() { analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 0); } void Stop() { analogWrite(5 , 0); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 0); }
4. 擴展
本實驗采用3個近紅外傳感器,利用的是近紅外傳感器能夠識別到距離較近的桌面,無法識別到距離較遠的地面,因此桌面要距離地面遠一些。
本實驗還可以使用灰度傳感器或者白標傳感器。利用的是灰度和白標在懸崖處極難收到反射回來的紅外線的原理,因此相應的桌面必須是淺色,如果桌面也是深色,灰度和白標傳感器就無法區分桌面和懸崖了。
審核編輯黃宇
?
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2553文章
51407瀏覽量
756657 -
機器人
+關注
關注
211文章
28646瀏覽量
208439 -
編程
+關注
關注
88文章
3637瀏覽量
93989
發布評論請先 登錄
相關推薦
閃速存儲器屬于RAM還是ROM,閃速存儲器有哪些功能和作用
本文旨在深入探討閃速存儲器的歸屬問題,即它是否屬于RAM或ROM,同時詳細闡述閃速存儲器的功能與作用。
閃速存儲器的閃速是指什么,閃速存儲器的速度比內存快嗎
存儲器則通過引入創新的擦除編程電路技術和高速靈敏度放大器,實現了對所有存儲單元的同時、快速擦除。這種高效的擦除速度,使得閃速存儲器在數據更新和維護方面具有顯著優勢,因此被形象地稱為“閃速”。
帶有振動抑制、支持零速、滿足功能安全ASIL-B的PWM協議輸出兩線差分輪速傳感器芯片SC9683TS
SC9683TS是賽卓電子新一代帶有功能安全機制的霍爾輪速傳感器IC。其基于霍爾感應原理技術實現磁性極輪或鐵磁性齒輪的旋轉速度和旋轉方向的探測。相比于上一代的輪速傳感器芯片SC9641

寧德時代發布“磐石底盤”,樹立智能底盤安全新標桿
中心柱碰撞測試中,展現出了不起火、不爆炸、無擴散的驚人表現,實現了全場景、全速域的極限守護。這一突破性的成果,無疑為新能源汽車的安全性能樹立了新的里程碑。 該底盤以電池為中心展開設計,創新性地采用了電池到底盤一體化(Ce
底盤電控系統HIL仿真測試解決方案
底盤電控系統作為整車電子電氣系統中的重要一部分,不僅可以改善駕乘的舒適性,同時也保證了駕乘的安全性,是汽車主動安全功能實現的重要一環。經緯恒潤推出的底盤電控HIL仿真測試設備可以滿足乘

一文了解底盤域控之制動功能
)Twobox-iBooster+ESP2)Onebox-IPB3駐車制動系統3.1駐車制動系統基礎3.2EPB的功能3.3EPB的實現方案1底盤域控基礎1.1底盤域
請問ADS8684+INA816實現模擬差分輸入功能是否可行?
我需要下圖表格參數模擬信號的檢測。打算使用TI ADS8684來實現模擬信號采集,但是ADS8684不支持差分信號輸入,計劃用INA816把差分轉成單端信號送到ADS8684芯片,來實現
發表于 12-13 14:05
線控底盤如何讓自動駕駛加速奔跑?
線控底盤技術是智能駕駛系統的核心技術之一,通過電子信號取代傳統的機械傳動,實現車輛動力、轉向、制動、懸架及換擋等功能的精準控制。它不僅是實現L3及以上自動駕駛的關鍵,也是推動智能化汽車
智能底盤持續發展,底盤域MCU的國產機會
電子發燒友網報道(文/梁浩斌)智能汽車時代,自動駕駛、智能座艙是感知最強的體驗升級。但對于汽車來說,底盤決定了乘坐舒適度和車輛動態,甚至關系到行駛安全,底盤永遠是汽車不可忽視的部分。而伴隨整車電子

線控底盤,自動駕駛時代的基石?
結合市場發展趨勢和政策支持,展望了未來技術的應用前景。 ? 線控底盤的定義與重要性 1.1 線控底盤的概念與發展背景 線控底盤(X-by-wire)技術通過電子信號取代傳統的機械連接和液壓系統,

鳳凰動力-AGV差速驅動輪的工作原理
鳳凰動力致力于提供多元化的AGV核心零部件產品。包括臥式/立式驅動輪、臥式/立式舵輪、電轉向輪、差速舵輪組、AGV專用高精密腳輪、低壓伺服電機、伺服減速電機、伺服驅動器、專用連接器和高精密行星減速機
雙速電機與單速電機的區別
在電機技術領域,雙速電機和單速電機是兩種常見的電機類型。它們在結構、工作原理、性能特點以及應用領域等方面都存在顯著的差異。本文將對雙速電機和單速電機的區別進行詳細的闡述,以便讀者能夠更
探討底盤的發展歷程及趨勢
自汽車誕生一百余年以來,底盤發展就和汽車發展深度綁定。底盤系統決定了汽車縱向、橫向和垂向六個自由度的動態行為,是汽車能夠跑運行的必要條件。
發表于 04-11 10:13
?697次閱讀





 工商網監
工商網監
評論