 用Raspberry Pi和傳感器制作“可自動營造舒適空間的裝置” 第二部分
用Raspberry Pi和傳感器制作“可自動營造舒適空間的裝置” 第二部分
大家好,我是吉田!
我們這次要創作一款讓家中更舒適、讓在家辦公更高效的設備,本文是第二部分。第一部分介紹了制作綱要和所需部件。這次我們將實際連接Bluetooth傳感器和Raspberry Pi。使用羅姆SensorMedal,您甚至可以遠程輕松地將傳感器值共享給Raspberry Pi!

本部分所需部件
Raspberry Pi 3 B+ 或 Raspberry Pi 4 Model B

Raspberry Pi 3 B+

Raspberry Pi 4 Model B
羅姆SensorMedal(SensorMedal-EVK-002)

手機電池

USB設備
使用100日元商店就能買到的USB迷你燈和迷你風扇等物件

本部分的流程
羅姆SensorMedal與Raspberry Pi的BLE連接
Raspberry Pi的USB控制
使用傳感器值讓硬件工作的程序
總結
1. 羅姆SensorMedal與Raspberry Pi的BLE連接
在第一部分中,我將羅姆SensorMedal連接到我的智能手機上并顯示了結果。在本項目中,Raspberry Pi將作為接收數據的航空母艦使用,所以在第二部分中,我們將通過Raspberry Pi的Bluetooth功能連接SensorMedal。
首先,安裝的Python程序bluepy,以便進行Raspberry Pi的Bluetooth連接。
pi@raspberrypi:~ $ sudo pip3 install bluepy Looking in indexes: https://pypi.org/simple, https://www.piwheels.org/simple Collecting bluepy Downloading https://www.piwheels.org/simple/bluepy/bluepy-1.3.0-cp37-cp37m-linux_armv7l.whl (560kB) 100% |████████████████████████████████| 563kB 608kB/s Installing collected packages: bluepy Successfully installed bluepy-1.3.0
然后,開啟SensorMedal和Raspberry Pi的電源,并將它們放在附近。

通過Bluetooth將SensorMedal連接到Raspberry Pi。有一個可以顯示來自SensorMedal的數值的方便程序,我們直接下載這個程序即可(我使用的是這里的Github)。
pi@raspberrypi:~ $ sudo mkdir Programs pi@raspberrypi:~ $ cd Programs pi@raspberrypi:~ $ sudo git clone http://github.com/bokunimowakaru/SensorMedal2
打開已下載的SensorMedal2文件夾,并執行以下示例程序。這個需要在Python 3中使用sudo權限執行。
pi@raspberrypi:~ $ cd SensorMedal2 pi@raspberrypi:~ $ sudo python3 ble_logger_SensorMedal2.py
怎么樣?是不是很簡單?如下圖所示,從Raspberry Pi能夠很輕松地看到SensorMedal傳來的測量值。
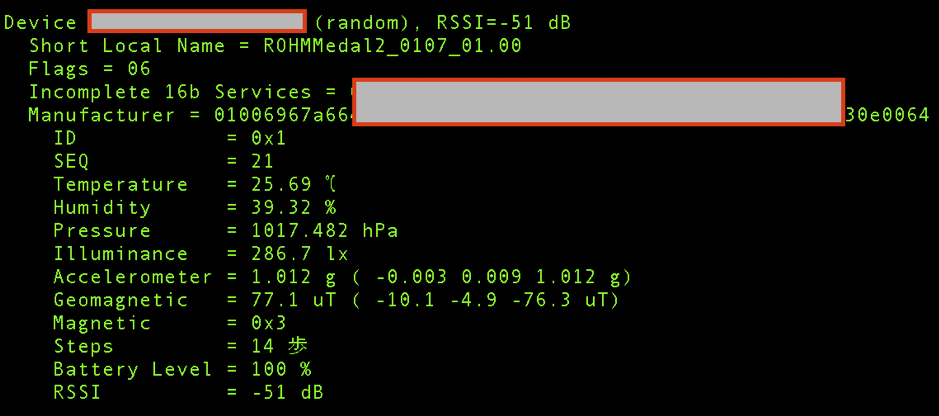
SensorMedal中共內置6種傳感器。每種傳感器的含義如下,使用這些傳感器可以測量并獲取相應的數值。
Temperature: 溫度(℃)
Humidity: 濕度(%)
Pressure: 氣壓(hPa)
Illuminance: 亮度(lx)
Accelerometer: 加速度(x軸、y軸、z軸)(g)
Geomagnetic: 陀螺儀傳感器值(x軸、y軸、z軸)(uT)
Magnetic: 霍爾傳感器值(磁鐵在附近通過為1,否則為0)
Steps: 步數(步)
Battery Level: 電池電量
2. Raspberry Pi的USB 控制
我們已經非常輕松地獲得了傳感器的值,現在,讓我們使用這些值來控制與Raspberry Pi連接的硬件吧。
先來實現第一部分中提到的“要是能自動搞定就好了(要是有這些功能就好了)”列表中的以下兩項。
| 編號 | 檢測功能 | 檢測后希望具備的功能 |
| 1 | 檢測房間的溫度 | 根據室溫控制風扇等 |
| 2 | 檢測工作臺周圍的亮度 | 亮度不夠時自動開燈 |
亮度會因天氣變化和房間情況而發生變化。如果亮度不夠還繼續工作的話,眼睛會很疲勞,所以我們使用SensorMedal的亮度值——Illiminance(lx)。亮度(光照強度)的單位是“勒克斯”。白天房間的亮度約為200?300(lx)。
測好亮度后,我們用一個USB迷你燈來實現亮度不足時自動開燈的功能。如下圖所示,將迷你燈插入Raspberry Pi的 USB端口。

安裝一個庫來控制USB,讓它可以根據亮度開燈和關燈。如下所示,下載并安裝庫文件。
pi@raspberrypi:~ $ wget https://www.gniibe.org/oitoite/ac-power-control-by-USB-hub/hub-ctrl.c pi@raspberrypi:~ $ sudo apt-get install libusb-dev pi@raspberrypi:~ $ gcc -o hub-ctrl hub-ctrl.c -lusb
現在,就可以通過命令打開和關閉插入USB端口的設備啦。這個“hub-ctrl”的使用方法為“hub-ctrl -b [Bus Num] -d [Device Num] -P [Port Num] -p [On:1 / Off:0] ”。使用“lsusb -t”命令獲取設備連接信息。在這里,Bus num: 1, Device num: 2, USB端口的Port num為2。
pi@raspberrypi:~ $ hub-ctrl Hub #0 at 001:002 INFO: individual power switching. WARN: Port indicators are NOT supported. Hub #1 at 001:001 INFO: ganged switching. WARN: Port indicators are NOT supported. pi@raspberrypi:~ $ lsusb -t /: Bus 01.Port 1: Dev 1, Class=root_hub, Driver=dwc_otg/1p, 480M |__ Port 1: Dev 2, If 0, Class=Hub, Driver=hub/5p, 480M |__ Port 1: Dev 3, If 0, Class=Vendor Specific Class, Driver=smsc95xx, 480M
如下所示,在“-p”后置“0”將關閉電源,置“1”則打開電源。
pi@raspberrypi:~ $ sudo hub-ctrl -b 1 -d 2 -P 2 -p 0 pi@raspberrypi:~ $ sudo hub-ctrl -b 1 -d 2 -P 2 -p 1

這是指定“-p 1”時的狀態。連接到USB端口的燈亮了
3.使用傳感器值讓硬件工作的程序
下面,我們將創建程序,把來自SensorMedal的數值與USB控制關聯起來。
基本上,可以使用前面下載的 SensorMedal2 程序。
pi@raspberrypi:~ $ sudo cp ble_logger_SensorMedal2.py ble_illum.py
我在原程序基礎上,添加了下述第9行和第78?85行的內容。當亮度低于300lx時,讓燈點亮。當亮度高于該值時,讓燈熄滅。
#!/usr/bin/env python3 # coding: utf-8 from __future__ import (division, absolute_import, print_function, unicode_literals) import fcntl import socket import struct import os def get_addr(ifname): try: s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) return socket.inet_ntoa( fcntl.ioctl( s.fileno(), 0x8915, # SIOCGIFADDR struct.pack('256s', ifname[:15].encode('utf-8')))[20:24]) except IOError: return 'Not Found!' interval = 10 # 工作間隔 from bluepy import btle from sys import argv import getpass from time import sleep def payval(num, bytes=1, sign=False): global val a = 0 for i in range(0, bytes): a += (256 ** i) * int(val[(num - 2 + i) * 2 : (num - 1 + i) * 2],16) if sign: if a >= 2 ** (bytes * 8 - 1): a -= 2 ** (bytes * 8) return a scanner = btle.Scanner() while True: try: devices = scanner.scan(interval) except Exception as e: print("ERROR",e) if getpass.getuser() != 'root': print('使用方法: sudo', argv[0]) exit() sleep(interval) continue for dev in devices: print("nDevice %s (%s), RSSI=%d dB" % (dev.addr, dev.addrType, dev.rssi)) isRohmMedal = False sensors = dict() for (adtype, desc, val) in dev.getScanData(): print(" %s = %s" % (desc, val)) if desc == 'Short Local Name' and val[0:10] == 'ROHMMedal2': isRohmMedal = True if isRohmMedal and desc == 'Manufacturer': # 將傳感器值代入字典變量sensors sensors['ID'] = hex(payval(2,2)) sensors['Illuminance'] = payval(25,2) / 1.2 sensors['Battery Level'] = payval(30) sensors['RSSI'] = dev.rssi # 在畫面中顯示 print(' ID =',sensors['ID']) print(' Illuminance =',round(sensors['Illuminance'],1),'lx') print(' Battery Level =',sensors['Battery Level'],'%') print(' RSSI =',sensors['RSSI'],'dB') ''' for key, value in sorted(sensors.items(), key=lambda x:x[0]): print(' ',key,'=',value) ''' illum = sensors['Illuminance'] if illum < 300: illum_msg = "Dark!" os.system(“sudo hub-ctrl -b 1 -d 2 -P 2 -p 1”) else: illum_msg = "Bright" os.system(“sudo hub-ctrl -b 1 -d 2 -P 2 -p 0”) print(illum_msg) sleep(interval)
通過sudo python3 ble_illum.py運行該程序。
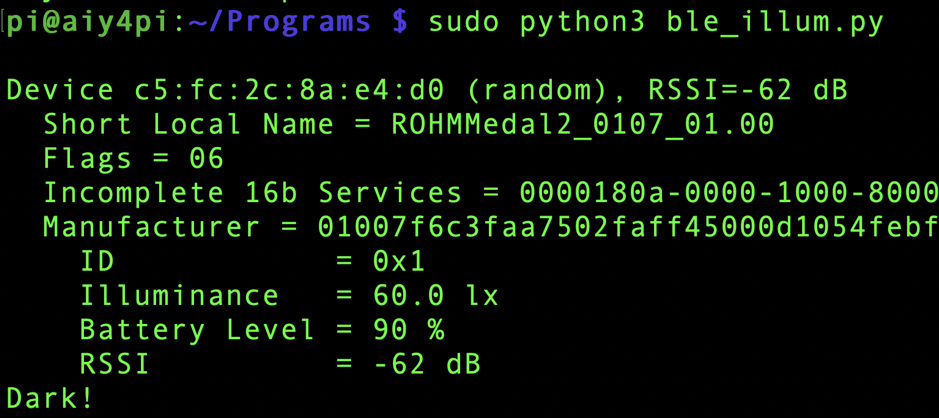
我們測試一下,如右側照片所示,用手遮蓋SensorMedal,傳感器測得的亮度變暗,USB燈能夠獲取傳感器的值并且很聽話地自動開燈!

4. 總結
在這部分中,我們嘗試用BLE連接了羅姆SensorMedal和Raspberry Pi。我想大家已經了解到,從遠處獲取各種傳感器數據是非常容易的事。
通過6種傳感器,不僅可以檢測亮度,還可以獲取溫濕度、氣壓和加速度等數據。測量辦工桌或房間里的各種數據,可能是件很有趣的事。
在下一部分,我想通過添加人體傳感器等器件,讓在家辦公環境更加舒適。
敬請期待!
審核編輯黃宇
-
傳感器
+關注
關注
2553文章
51407瀏覽量
756626 -
Raspberry Pi
+關注
關注
2文章
559瀏覽量
22343
發布評論請先 登錄
相關推薦
I2C接口的DAC8571輸出不正常是什么原因?
松下MPS媒體制作平臺第八篇:視頻混合器插件(第三部分)

視覺AI之旅:一起探索 FiftyOne ——第二部分 入門指南

松下MPS媒體制作平臺第七篇:視頻混合器插件(第二部分)

樹莓派傳感器使用方法 樹莓派 Raspberry Pi 4優缺點
Raspberry Pi Pico 2
Air780EP硬件設計原理解析(第二部分)

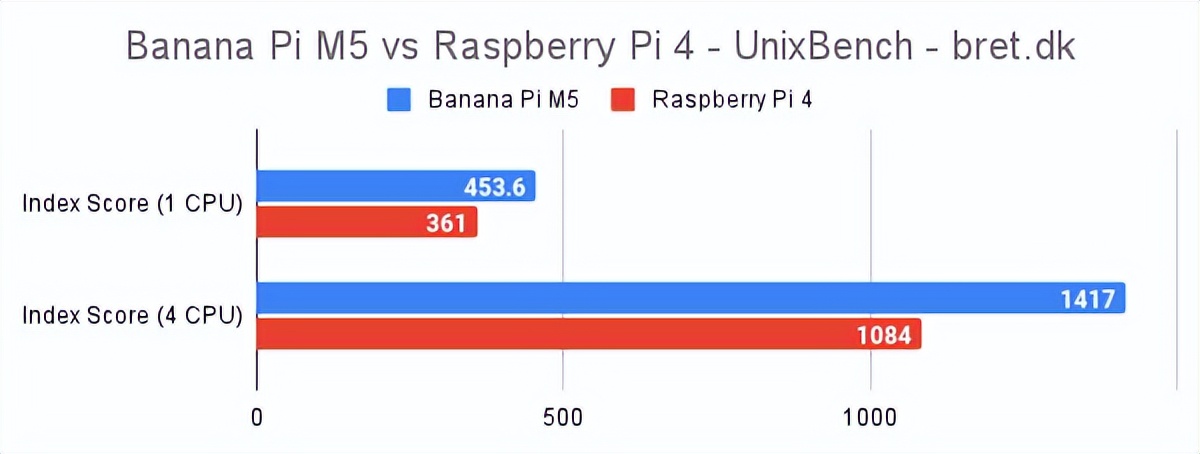
Banana Pi M5 與 Raspberry Pi 4 – 基準測試
0.4mm層疊封裝(PoP)封裝的PCB組裝指南,第二部分

求助,opa695的datesheet問題求解
使用rt_thread_mdelay函數后出現hardfault的原因?
如何用Arduino制作一個簡易自動喂魚器
5分鐘內將Raspberry Pi Pico變成簡單的示波器+波形發生器






 工商網監
工商網監
評論