 進入OS前的兩步:PendSV(任務切換)
進入OS前的兩步:PendSV(任務切換)
先了解下如何使用PendSV異常。為何要使用PendSV而不是其他的異常,請參考《cortex-M3權威指南》。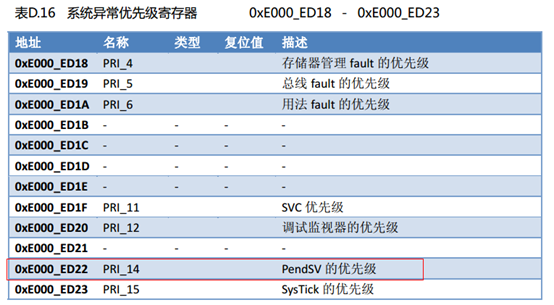
 往ICSR第28位寫1,即可將PendSV異常掛起。若是當前沒有高優先級中斷產生,那么程序將會進入PendSV handler
往ICSR第28位寫1,即可將PendSV異常掛起。若是當前沒有高優先級中斷產生,那么程序將會進入PendSV handler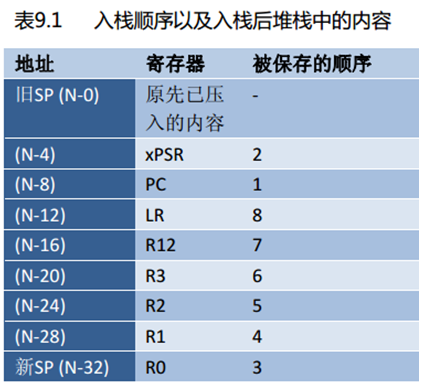 在步驟一中,我們已經設置了PSP,那這8個寄存器就會自動入棧到PSP所指地址處。2取向量:找到PendSV ISR的入口地址,這樣就能跳到ISR了。,3更新寄存器內容:做完這三步后,程序就進入ISR了。進入ISR前,我們已經完成了步驟一,cortex-M3已經幫我們完成了步驟二的一部分,剩下的需要我們手動完成。在ISR中添加代碼如下:
在步驟一中,我們已經設置了PSP,那這8個寄存器就會自動入棧到PSP所指地址處。2取向量:找到PendSV ISR的入口地址,這樣就能跳到ISR了。,3更新寄存器內容:做完這三步后,程序就進入ISR了。進入ISR前,我們已經完成了步驟一,cortex-M3已經幫我們完成了步驟二的一部分,剩下的需要我們手動完成。在ISR中添加代碼如下: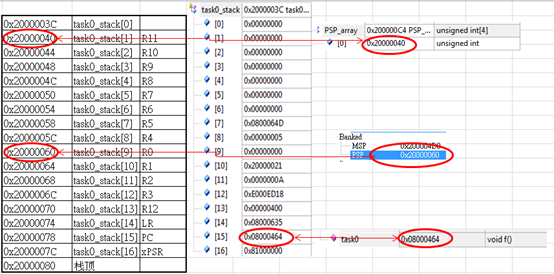 左邊表格是預期值,右邊是keil調試的實際值。可以看出,是一致的。在任務初始化時(步驟一),我們將PSP指向任務0的棧頂0x20000080。在進入PendSV之前,cortex-M3自動入棧八個值,此時PSP指向了0x20000060。然后我們再保存R4-R11到0x20000040~0x2000005C。這樣很容易看明白,如果需要下次再切換到task0,只需恢復R4~R11,再將PSP指向0x20000060即可。所以切換到另一個任務的代碼:
左邊表格是預期值,右邊是keil調試的實際值。可以看出,是一致的。在任務初始化時(步驟一),我們將PSP指向任務0的棧頂0x20000080。在進入PendSV之前,cortex-M3自動入棧八個值,此時PSP指向了0x20000060。然后我們再保存R4-R11到0x20000040~0x2000005C。這樣很容易看明白,如果需要下次再切換到task0,只需恢復R4~R11,再將PSP指向0x20000060即可。所以切換到另一個任務的代碼: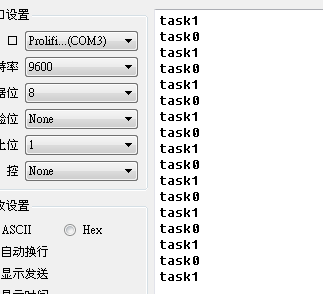 可以看出,兩個任務可以切換了。 審核編輯:湯梓紅
可以看出,兩個任務可以切換了。 審核編輯:湯梓紅
1 如何設定PendSV優先級?
NVIC_SYSPRI14 EQU 0xE000ED22
NVIC_PENDSV_PRI EQU 0xFF
LDR R0, =NVIC_SYSPRI14 LDR R1, =NVIC_PENDSV_PRI
STRB R1, [R0]
2 如何觸發PendSV異常?
往ICSR第28位寫1,即可將PendSV異常掛起。若是當前沒有高優先級中斷產生,那么程序將會進入PendSV handler
NVIC_INT_CTRL EQU 0xE000ED04
NVIC_PENDSVSET EQU 0x10000000
LDR R0, =NVIC_INT_CTRL
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
3 編寫PendSV異常handler
這里用PendSV_Handler來觸發LED點亮,以此證明PendSV異常觸發的設置是正確的。
unsigned char flag=0;
void LEDInit(void)
{
RCC->APB2ENR|=1<<2;
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000003;
GPIOA->ODR|=1<<8;
}
__asm void SetPendSVPro(void)
{
NVIC_SYSPRI14 EQU 0xE000ED22
NVIC_PENDSV_PRI EQU 0xFF
LDR R1, =NVIC_PENDSV_PRI
LDR R0, =NVIC_SYSPRI14
STRB R1, [R0]
BX LR
}
__asm void TriggerPendSV(void)
{
NVIC_INT_CTRL EQU 0xE000ED04
NVIC_PENDSVSET EQU 0x10000000
LDR R0, =NVIC_INT_CTRL
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
BX LR
}
int main(void)
{
SetPendSVPro();
LEDInit();
TriggerPendSV();
while(1);
}
void PendSV_Handler(void)
{
LED0 = 0;
}
上述代碼可以正常點亮LED,說明PendSV異常是正常觸發了。OK,是時候挑戰任務切換了。如何實現任務切換?三個步驟:步驟一:在進入中斷前先設置PSP。
curr_task = 0;
設置任務0為當前任務:
__set_PSP((PSP_array[curr_task] + 16*4));
設置PSP指向task0堆棧的棧頂位置:
__set_CONTROL(0x3);
設置為用戶級,并使用PSP堆棧:
__ISB();
指令同步隔離。步驟二:將當前寄存器的內容保存到當前任務堆棧中。進入ISR時,cortex-m3會自動保存八個寄存器到PSP中,剩下的幾個需要我們手動保存。步驟三:在Handler中將下一個任務的堆棧中的內容加載到寄存器中,并將PSP指向下一個任務的堆棧。這樣就完成了任務切換。要在PendSV 的ISR中完成這兩個步驟,我們先需了解下在進入PendSV ISR時,cortex-M3做了什么? 1入棧:會有8個寄存器自動入棧。入棧內容及順序如下:在步驟一中,我們已經設置了PSP,那這8個寄存器就會自動入棧到PSP所指地址處。2取向量:找到PendSV ISR的入口地址,這樣就能跳到ISR了。,3更新寄存器內容:做完這三步后,程序就進入ISR了。進入ISR前,我們已經完成了步驟一,cortex-M3已經幫我們完成了步驟二的一部分,剩下的需要我們手動完成。在ISR中添加代碼如下:
MRS R0, PSP
保存PSP到R0。為什么是PSP而不是MSP。因為在OS啟動的時候,我們已經把SP設置為PSP了。這樣使得用戶程序使用任務堆棧,OS使用主堆棧,不會互相干擾。不會因為用戶程序導致OS崩潰。
STMDB R0!,{R4-R11}
保存R4-R11到PSP中。C語言表達是*(--R0)={R4-R11},R0中值先自減1,然后將R4-R11的值保存到該值所指向的地址中,即PSP中。STMDB Rd!,{寄存器列表} 連續存儲多個字到Rd中的地址值所指地址處。每次存儲前,Rd先自減一次。若是ISR是從從task0進來,那么此時task0的堆棧中已經保存了該任務的寄存器參數。保存完成后,當前任務堆棧中的內容如下(假設是task0)左邊表格是預期值,右邊是keil調試的實際值。可以看出,是一致的。在任務初始化時(步驟一),我們將PSP指向任務0的棧頂0x20000080。在進入PendSV之前,cortex-M3自動入棧八個值,此時PSP指向了0x20000060。然后我們再保存R4-R11到0x20000040~0x2000005C。這樣很容易看明白,如果需要下次再切換到task0,只需恢復R4~R11,再將PSP指向0x20000060即可。所以切換到另一個任務的代碼:
LDR R1,=__cpp(&curr_task)
LDR R3,=__cpp(&PSP_array)
LDR R4,=__cpp(&next_task)
LDR R4,[R4]
獲取下一個任務的編號:
STR R4,[R1]
Curr_task=next_task
LDR R0,[R3, R4, LSL #2]
獲得任務堆棧地址,若是task0,那么R0=0x20000040( R0=R3+R4*4)
LDMIA R0!,{R4-R11}
恢復堆棧中的值到R4~R11。R4=*(R0++)。執行完后,R0中值變為0x20000060LDMIA Rd! {寄存器列表} 先將Rd中值所指地址處的值送出寄存器中,Rd再自增1.*
MSR PSP, R0
PSP=R0。
BX LR
中斷返回。完整代碼:
void USART1_Init(void);
void task0(void) ;
unsigned char flag=1;
uint32_t curr_task=0; // 當前執行任務
uint32_t next_task=1; // 下一個任務
uint32_t task0_stack[17];
uint32_t task1_stack[17];
uint32_t PSP_array[4];
u8 task0_handle=1;
u8 task1_handle=1;
void task0(void)
{
while(1)
{
if(task0_handle==1)
{
printf("task0
");
task0_handle=0;
task1_handle=1;
}
}
}
void task1(void)
{
while(1)
{
if(task1_handle==1)
{
printf("task1
");
task1_handle=0;
task0_handle=1;
}
}
}
void LEDInit(void)
{
RCC->APB2ENR|=1<<2;
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000003;
GPIOA->ODR|=1<<8;
}
__asm void SetPendSVPro(void)
{
NVIC_SYSPRI14 EQU 0xE000ED22
NVIC_PENDSV_PRI EQU 0xFF
LDR R1, =NVIC_PENDSV_PRI
LDR R0, =NVIC_SYSPRI14
STRB R1, [R0]
BX LR
}
__asm void TriggerPendSV(void)
{
NVIC_INT_CTRL EQU 0xE000ED04
NVIC_PENDSVSET EQU 0x10000000
LDR R0, =NVIC_INT_CTRL
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
BX LR
}
int main(void)
{
USART1_Init();
SetPendSVPro();
LEDInit();
printf("OS test
");
PSP_array[0] = ((unsigned int) task0_stack) + (sizeof task0_stack) - 16*4;
//PSP_array中存儲的為task0_stack數組的尾地址-16*4,即task0_stack[1023-16]地址
HW32_REG((PSP_array[0] + (14<<2))) = (unsigned long) task0; /* PC */
//task0的PC存儲在task0_stack[1023-16]地址 +14<<2中,即task0_stack[1022]中
HW32_REG((PSP_array[0] + (15<<2))) = 0x01000000; /* xPSR */
PSP_array[1] = ((unsigned int) task1_stack) + (sizeof task1_stack) - 16*4;
HW32_REG((PSP_array[1] + (14<<2))) = (unsigned long) task1; /* PC */
HW32_REG((PSP_array[1] + (15<<2))) = 0x01000000; /* xPSR */
/* 任務0先執行 */
curr_task = 0;
/* 設置PSP指向任務0堆棧的棧頂 */
__set_PSP((PSP_array[curr_task] + 16*4));
SysTick_Config(9000000);
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);//72/8=9MHZ
/* 使用堆棧指針,非特權級狀態 */
__set_CONTROL(0x3);
/* 改變CONTROL后執行ISB (architectural recommendation) */
__ISB();
/* 啟動任務0 */
task0();
//LED0=0;
while(1);
}
__asm void PendSV_Handler(void)
{
// 保存當前任務的寄存器內容
MRS R0, PSP // 得到PSP R0 = PSP
// xPSR, PC, LR, R12, R0-R3已自動保存
STMDB R0!,{R4-R11}// 保存R4-R11共8個寄存器得到當前任務堆棧
// 加載下一個任務的內容
LDR R1,=__cpp(&curr_task)
LDR R3,=__cpp(&PSP_array)
LDR R4,=__cpp(&next_task)
LDR R4,[R4] // 得到下一個任務的ID
STR R4,[R1] // 設置 curr_task = next_task
LDR R0,[R3, R4, LSL #2] // 從PSP_array中獲取PSP的值
LDMIA R0!,{R4-R11}// 將任務堆棧中的數值加載到R4-R11中
//ADDS R0, R0, #0x20
MSR PSP, R0 // 設置PSP指向此任務
// ORR LR, LR, #0x04
BX LR // 返回
// xPSR, PC, LR, R12, R0-R3會自動的恢復
ALIGN 4
}
void SysTick_Handler(void)
{
flag=~flag;
LED0=flag;
if(curr_task==0)
next_task=1;
else
next_task=0;
TriggerPendSV();
}
void USART1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* config USART1 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* USART1 GPIO config */
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* USART1 mode config */
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (unsigned char) ch);
while (!(USART1->SR & USART_FLAG_TXE));
return (ch);
}
測試后結果如圖:可以看出,兩個任務可以切換了。 審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
led
+關注
關注
242文章
23355瀏覽量
663190 -
寄存器
+關注
關注
31文章
5363瀏覽量
121162 -
中斷
+關注
關注
5文章
900瀏覽量
41752 -
Cortex-M3
+關注
關注
9文章
270瀏覽量
59589 -
任務切換
+關注
關注
0文章
4瀏覽量
6834
原文標題:進入OS前的兩步:PendSV(任務切換)
文章出處:【微信號:c-stm32,微信公眾號:STM32嵌入式開發】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
請問UCOSIII如何切換到新任務?
UCOS/III 是在PendSV中斷里切換任務的,最后BXLR(見紅色字體),LR是舊任務返回地址, 所以應該跳到舊任務繼續執行,為什么會
發表于 05-09 06:35
【安富萊】【μCOS-III教程】第5章 任務切換設計
大家理解,下面是上圖的執行流程:1.任務A呼叫SVC來請求任務切換(例如,等待某些工作完成)2.OS接收到請求,做好上下文切換的準備,并且懸
發表于 01-08 17:40
stm32單片機移植μc/os時,任務級切換函數和中斷級切換函數過程不是一樣的嗎?
移植μc/os時,任務級切換函數即OSCtrSw,中斷級任務切換函數為OSIntCtrSw,兩者
發表于 03-13 07:26
PC里VC下移植的uc/os-II任務切換后切換不回來
菜鳥一個,想先在PC上熟悉一下uc/os-II ,但是遇到了些問題了,希望熟悉uc/os-II的高手們幫幫忙吧。任務切換什么的完全不會,OSTimeDly()函數貌似在PC上面有很大的
發表于 06-10 04:36
【設計技巧】從單片機到操作系統(6)-FreeRTOS任務切換機制詳解
上下文切換。過程如圖所示任務切換的源碼實現過程差不多了解了,那看看FreeRTOS中怎么實現吧!!FreeRTOS有兩種方法觸發任務
發表于 07-31 08:30
ucos上下文該怎么切換?
的值,那么在pendSV處理結束的時刻我們看到有條 BXLR 指令, 那豈不是又回到了任務A的這個地方呀,怎么能切換到別的任務上去啊??????---->問題2:參見附件:圖示中上下文
發表于 08-26 03:21
OSCtxSw函數是怎么觸發PendSV_Handler函數的?
, =NVIC_PENDSVSET STRR1, [R0] BXLR[/mw_shl_code]在ucos中,這個匯編代碼應該是起到切換任務的作用吧!聽說他是通過調用PendSV_Handler這個匯編函數實現
發表于 09-02 20:27
淺談RTOS中的多任務切換(基于UC/OS iii)
淺談RTOS中的多任務切換(基于UC/OS iii)文章目錄淺談RTOS中的多任務切換(基于UC/OS
發表于 11-23 18:06
?25次下載

UC/OS-III學習——觸發PendSV中斷
文檔UC/OS-III學習——觸發PendSV中斷系列文章目錄前言一、關于PendSV的基礎知識二、代碼1.c語言2.匯編語言前言PendSV典型使用場合是在上下文
發表于 12-01 14:51
?8次下載





 工商網監
工商網監
評論