") 圖像處理器的基本概念
圖像處理器的基本概念
01
Background
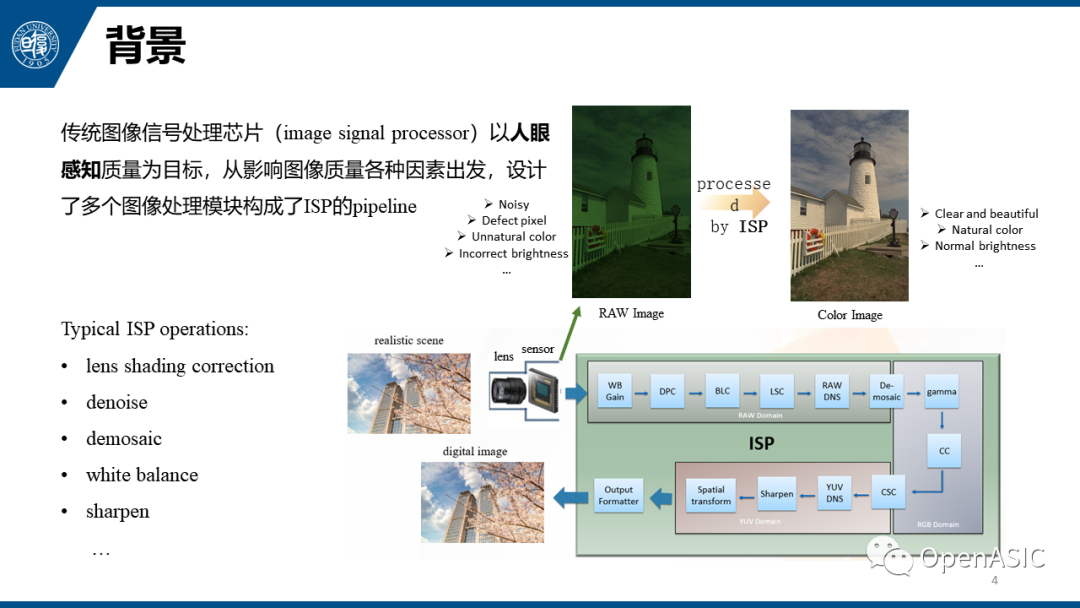
傳統(tǒng)圖像信號處理芯片即ISP,會處理來自圖像傳感器端的RAW圖數(shù)據(jù),以人眼感知質(zhì)量為目標(biāo),設(shè)計出了多個圖像處理模塊,最終得到一張美觀自然的彩色圖像。標(biāo)準(zhǔn)的ISP一般都有缺陷校正、去噪、銳化、去馬賽克、自動白平衡等模塊。
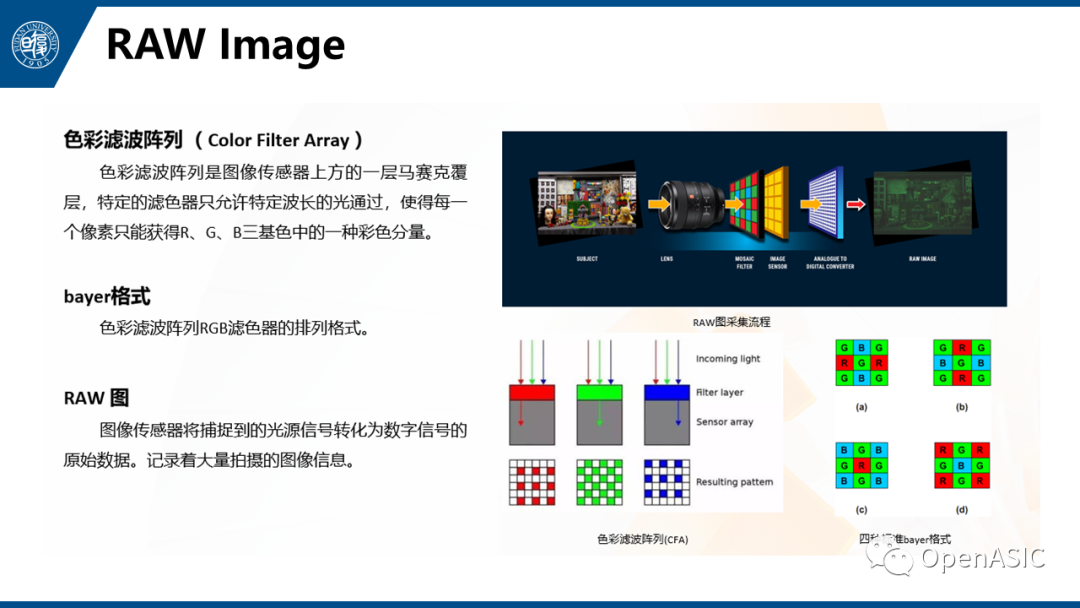
首先是ISP處理的對象:RAW圖數(shù)據(jù)。RAW圖是CMOS或者CCD圖像傳感器將捕捉到的光源信號轉(zhuǎn)化為數(shù)字信號的原始數(shù)據(jù)。因?yàn)閳D像傳感器上每個進(jìn)行光電轉(zhuǎn)換的像素單元,本身是無法識別出光源中不同顏色成分的,因此需要在圖像傳感器上方覆蓋一層色彩濾波陣列,讓每一個像素只會得到R,G,B三基色中的一種彩色分量。因此RAW圖的像素值的色彩是缺失的,人眼觀看具有強(qiáng)烈的馬賽克效應(yīng),需要經(jīng)過ISP轉(zhuǎn)換為標(biāo)準(zhǔn)的RGB圖像,這就是ISP中的核心模塊去馬賽克(Demosaic)的功能。RAW圖像數(shù)據(jù)一般是R、G、B三種像素值交錯排列,這組成了常見的標(biāo)準(zhǔn)bayer格式。其中綠色顏色像素會是紅色和藍(lán)色像素的兩倍,這是因?yàn)槿搜蹖G色更敏感,通過綠色像素能感知圖像結(jié)構(gòu)信息。
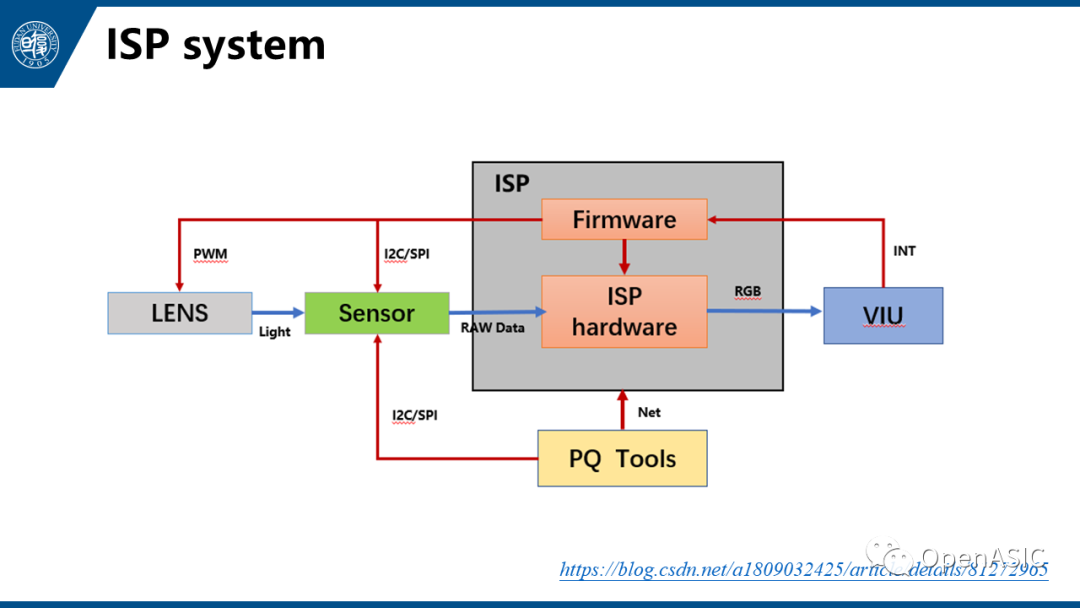
這里展示的是典型的相機(jī)系統(tǒng)結(jié)構(gòu)。鏡頭模組lens作為光學(xué)系統(tǒng)將光信號投射到sensor的感光區(qū)域后,sensor 經(jīng)過光電轉(zhuǎn)換,將Bayer 格式的RAW圖像送給ISP,ISP 經(jīng)過算法處理,輸出RGB 空間域的圖像給后端的視頻采集單元。在這個過程中,ISP 通過運(yùn)行在其上的firmware 對ISP邏輯,lens和sensor 進(jìn)行相應(yīng)控制,進(jìn)而完成自動對焦、自動曝光、自動白平衡等功能。其中,firmware 的運(yùn)轉(zhuǎn)靠視頻采集單元的中斷驅(qū)動。另外ISP還會有配套的圖像質(zhì)量調(diào)優(yōu)工具PQ tools,它通過網(wǎng)口或者串口完成對ISP 的配置參數(shù)調(diào)整。
02
ISP Pipeline
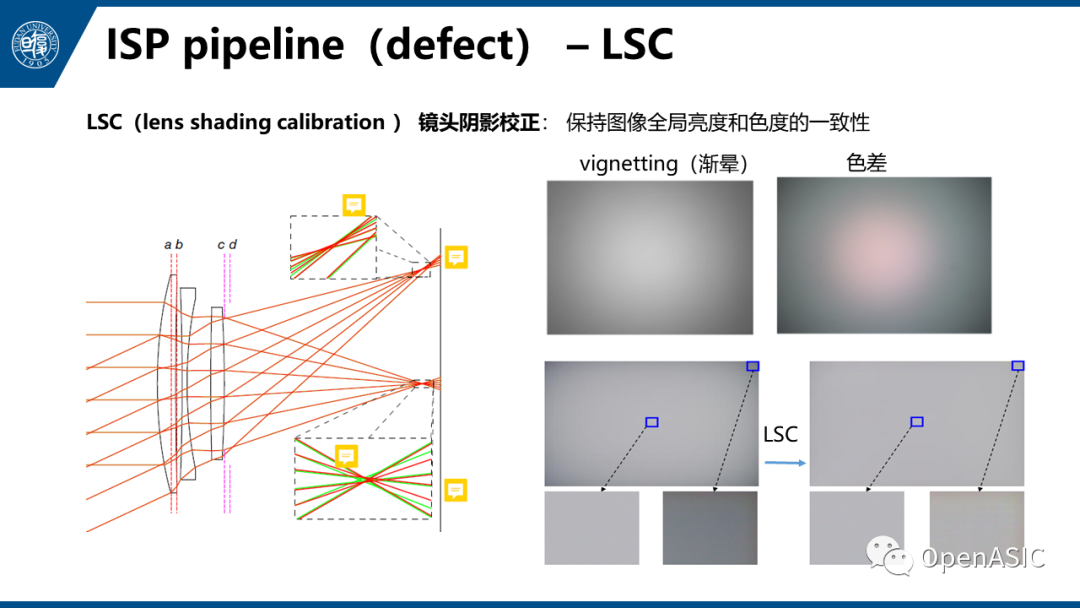
LSC負(fù)責(zé)對鏡頭陰影矯正,去除圖像陰影。鏡頭陰影(Lens Shading)主要分為2種:亮度陰影(LumaShading)和色彩陰影(Color Shading)。
亮度陰影就是我們常說的暗角/漸暈,表現(xiàn)為圖像中心區(qū)域較亮,四周偏暗。亮度陰影的成因主要有2種:
- 鏡頭本身的機(jī)械結(jié)構(gòu)導(dǎo)致。鏡頭的各模塊在制作和組裝的過程中存在一定的工藝誤差,從而影響光線在鏡頭內(nèi)部的傳播。如圖所示,較大角度進(jìn)入鏡頭的一些光線被鏡頭遮擋,這些邊緣位置上的光線進(jìn)入sensor時的亮度大幅衰減。
- 鏡頭的光學(xué)特性引起。對于整個鏡頭,可將其視為一個凸透鏡。而凸透鏡中心的聚光能力遠(yuǎn)大于其邊緣,從而導(dǎo)致圖像傳感器中心的光強(qiáng)度大于四周。此種現(xiàn)象也叫做邊緣光照度衰減。
色彩陰影表現(xiàn)為圖像中心區(qū)域與四周顏色不一致,即圖像的四周或中心區(qū)域出現(xiàn)偏色。色彩陰影的成因較為復(fù)雜,影響因素較多,這里做簡要介紹:
- 鏡頭本身的光學(xué)特性(色散現(xiàn)象),如圖所示,鏡頭對不同波長光線的折射率不同,進(jìn)而使得它們聚焦位置不一樣,導(dǎo)致傳感器獲得的色彩信息存在偏差。
- 此外鏡頭和圖像傳感器之間還會引入紅外截止濾波片(IR-Cut filter),傳感器每個像素之上還制造有加強(qiáng)聚光能力的微透鏡,它們的存在也會引入額外的色差問題。
在實(shí)際應(yīng)用中,ISP中鏡頭陰影矯正模塊會存儲一組標(biāo)準(zhǔn)光源下的校正系數(shù),通過檢測色溫決定使用何種光源條件下的校正系數(shù)。對于非標(biāo)準(zhǔn)光源的情況,增益值由標(biāo)準(zhǔn)光源下的增益值插值得出。該步驟由上位機(jī)完成。
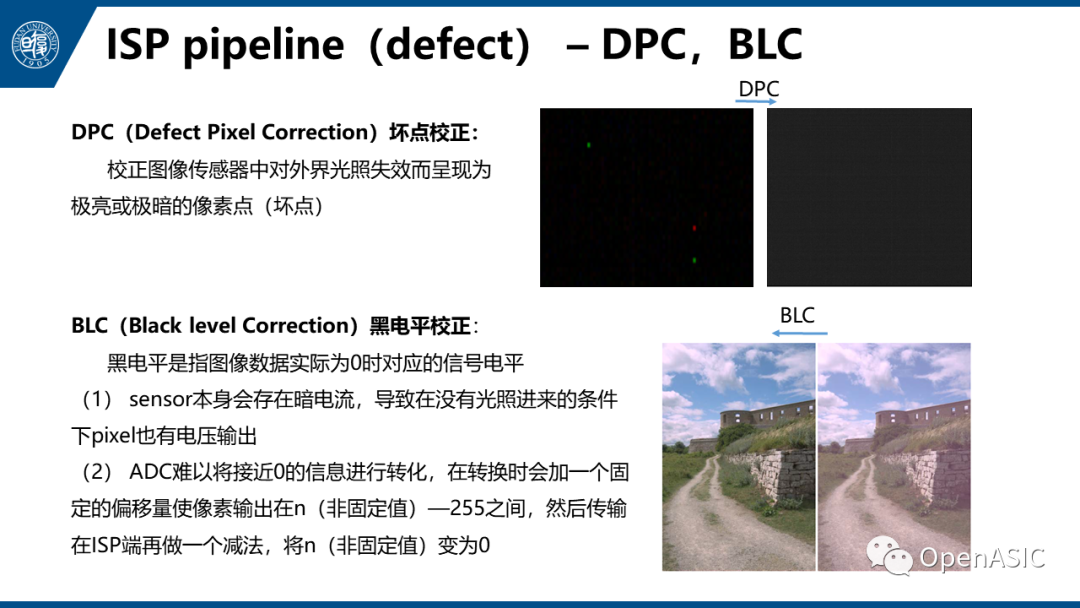
DPC壞點(diǎn)校正模塊用于校正圖像傳感器中對外界光照失效而呈現(xiàn)為極亮或極暗的像素點(diǎn)(壞點(diǎn)),這些壞點(diǎn)會因傳感器的制造瑕疵以及器件隨時間的磨損而出現(xiàn)。
BLC黑電平校正存在于各個ISP的處理模塊中,在真實(shí)情況下,當(dāng)場景信息不存在,可以理解為全黑時,傳感器不會輸出為0,這是因?yàn)閟ensor本身有暗電流導(dǎo)致在沒有光照進(jìn)來的條件下pixel也有電壓輸出;此外傳感器中ADC模塊難以將接近0的信息進(jìn)行轉(zhuǎn)化。因此在其他模塊對數(shù)據(jù)做處理時,需要先減去黑電平,消除圖像信息誤差。如圖所示,若不進(jìn)行黑電平校正,最后圖像色彩會不自然。
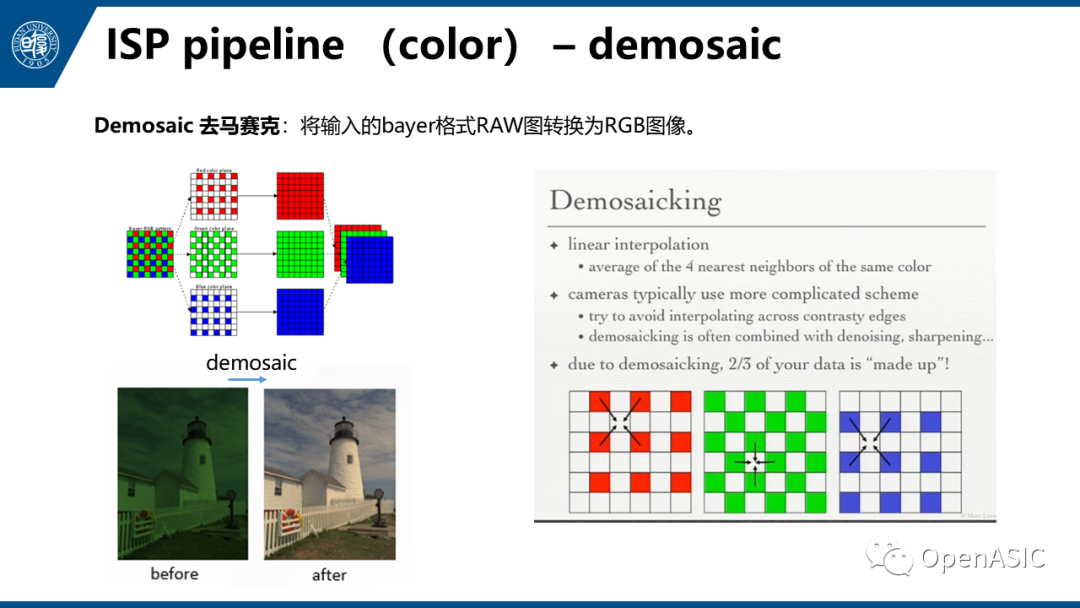
去馬賽克模塊通過色彩插值來恢復(fù)RAW數(shù)據(jù)中每個像素缺失的色彩信息,而該模塊同時對圖像的清晰度和噪聲都有顯著影響,是ISP中的核心模塊之一。
色彩插值的一般思路是:根據(jù)圖像信息平滑性的特性,使用像素點(diǎn)周圍與缺失色彩的同色信息來完成插值。因此如何設(shè)計一個魯棒的采樣機(jī)制是去馬賽克算法的核心。
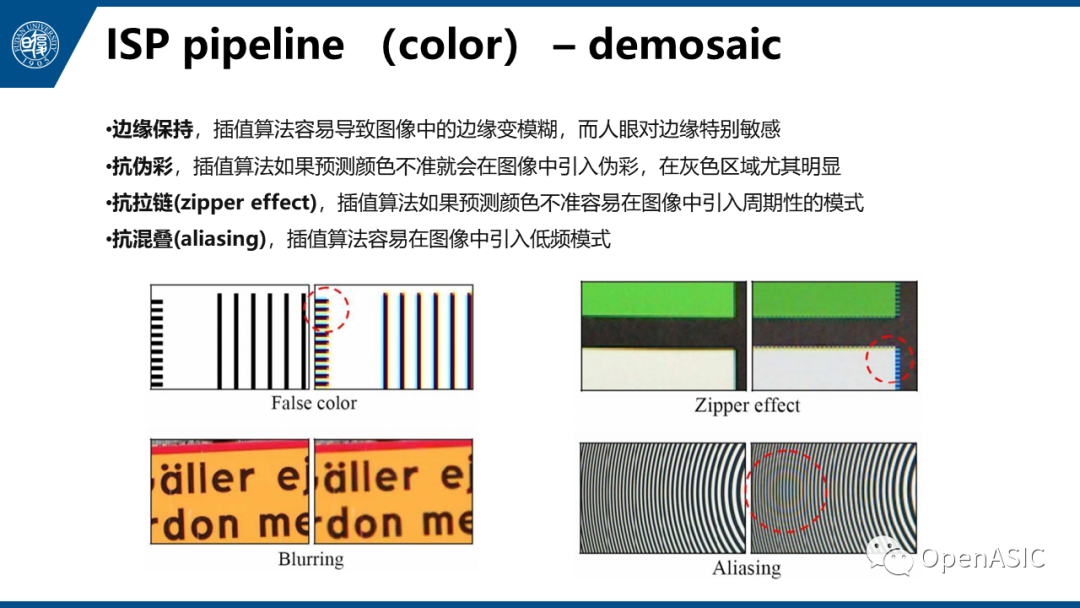
這里展示了去馬賽克算法會遇到的經(jīng)典問題。比如因?yàn)檫吘壣蔬^渡強(qiáng)烈,算法會難以對待插值點(diǎn)的缺失色彩進(jìn)行正確地采樣,因此會出現(xiàn)偽彩、拉鏈效應(yīng)等。同時當(dāng)圖像空間頻率高而采樣頻率不足時,就會出現(xiàn)混疊問題,導(dǎo)致圖像中出現(xiàn)偽影。目前也有人在做進(jìn)一步的研究,比如使用深度學(xué)習(xí)完成聯(lián)合去馬賽克去噪任務(wù)。

另一個核心模塊是白平衡(White Balance),該模塊的任務(wù)是確保在不同的光源條件下,場景目標(biāo)呈現(xiàn)色彩是一致的。對圖像進(jìn)行白平衡的依據(jù)來源于人類視覺系統(tǒng)所具有的色彩恒常性(Color Constancy),即人類對物體色彩感知不受光源影響。該機(jī)制的一種體現(xiàn)如圖所示,在這張圖片中,沒有一個像素點(diǎn)表示紅色,但是當(dāng)我們從整體來看這張圖,立刻會產(chǎn)生“紅色草莓”、“黃色木桌”、“白色盤子”的印象。這就是我們大腦根據(jù)一些“先驗(yàn)知識”進(jìn)行自動白平衡的結(jié)果。但這張圖片的顏色本身還是很不自然,該問題發(fā)生的典型情況就是相機(jī)Sensor在不同色溫的光源下,被攝對象會呈現(xiàn)出不同的顏色,也就是色偏(Color Cast)問題。
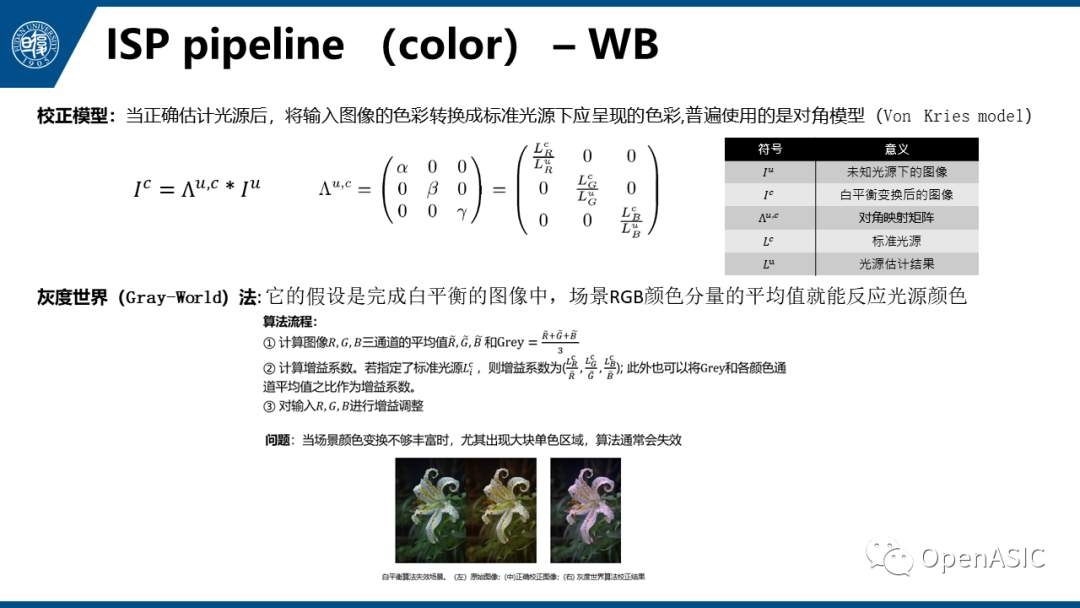
白平衡的常用校正模型是對角模型,其數(shù)學(xué)含義是當(dāng)我們能正確估計光源色溫后,將輸入圖像的各色彩通道乘以對應(yīng)增益校正值,得到標(biāo)準(zhǔn)光源下的色彩值。白平衡的核心也是光源估計問題。這里介紹一個經(jīng)典的算法灰度世界法,該算法的假設(shè)是色彩豐富的圖像中,場景RGB顏色分量的平均值就能反應(yīng)光源顏色,在達(dá)成白平衡的圖像中圖像各顏色通道的平均值應(yīng)該是相等的,即R平均=G平均=B平均,其算法流程如圖所示。
第一步,計算圖像各顏色通道的平均值和整體的平均值,這里該整體平均值記作gray; 第二步:若指定了標(biāo)準(zhǔn)光源色溫,則用標(biāo)準(zhǔn)光源顏色值與圖像各顏色通道平均值相比得到增益系數(shù)。同時也可以將Gray值與各顏色通道平均值相比,得到增益系數(shù)。后一種做法屬于自動白平衡。最后使用對角校正模型就可以完成白平衡操作。
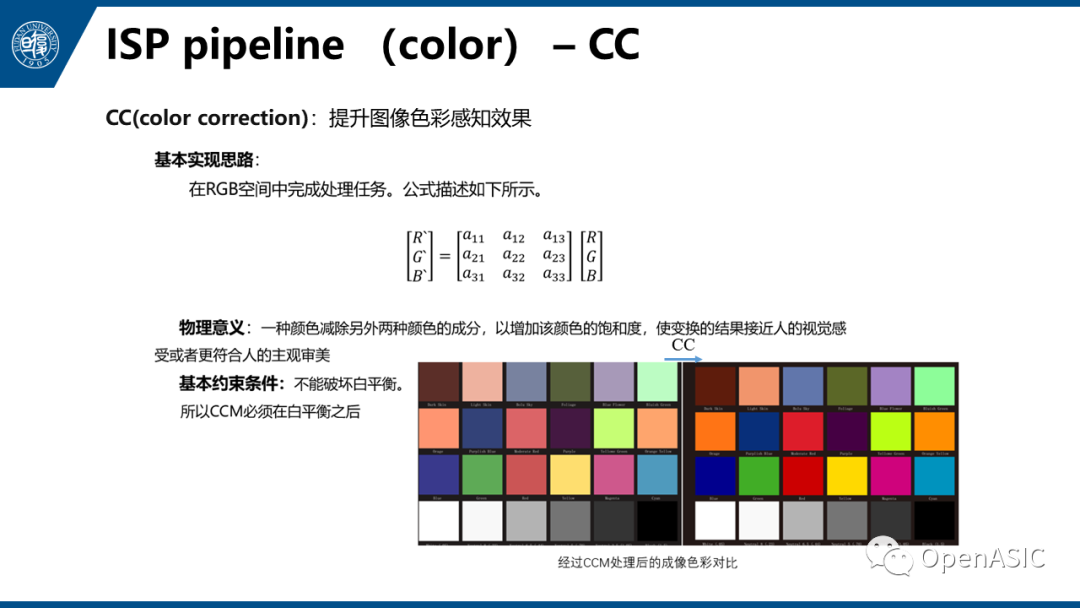
另外,在ISP中都會有一個顏色校正模塊,CCM(Color Correction Matrix),它是通過色彩矯正矩陣對圖像的色彩進(jìn)行線性變換,使得校正后的圖像的效果更接近人眼的視覺感知。該矩陣值也是經(jīng)過標(biāo)定得到的。這里存在一個約束是,CCM不能破壞白平衡,因此CCM需要在白平衡之后,且要保證灰色系區(qū)域仍滿足R=G=B。
數(shù)字圖像信號在采集、傳輸和顯示過程中受到成像設(shè)備以及外部環(huán)境的影響,會包含許多噪聲,噪聲會影響圖像的視覺效果,也會給后續(xù)的圖像分析,如壓縮、編碼、識別等,造成不利影響,因此需要對噪聲圖像進(jìn)行去噪處理。
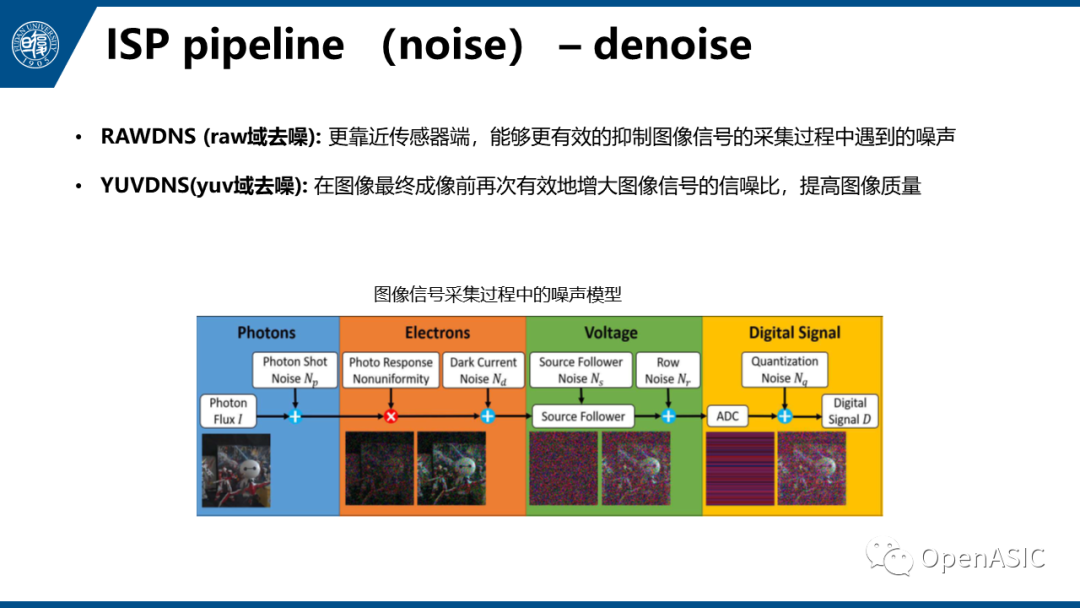
ISP中RAW圖去噪環(huán)節(jié)更靠近傳感器端,因此該環(huán)節(jié)能夠更有效地抑制圖像信號采集過程中遇到的噪聲,如光子散粒噪聲、固定模式噪聲、暗電流噪聲等。但即使經(jīng)過RAW圖去噪,由信號采集環(huán)節(jié)引入噪聲也不會完全消除,而且當(dāng)ISP將采集的圖像信號轉(zhuǎn)換到Y(jié)UV域時,圖像信號又經(jīng)過ISP中多個處理模塊,每個模塊不同程度地引入了新的噪聲。YUV圖像去噪環(huán)節(jié)可以在圖像最終成像前再次有效地增大圖像信號的信噪比,提高圖像質(zhì)量,直接影響到后續(xù)圖像視覺效果。該環(huán)節(jié)處理的信息包括圖像亮度和色度。
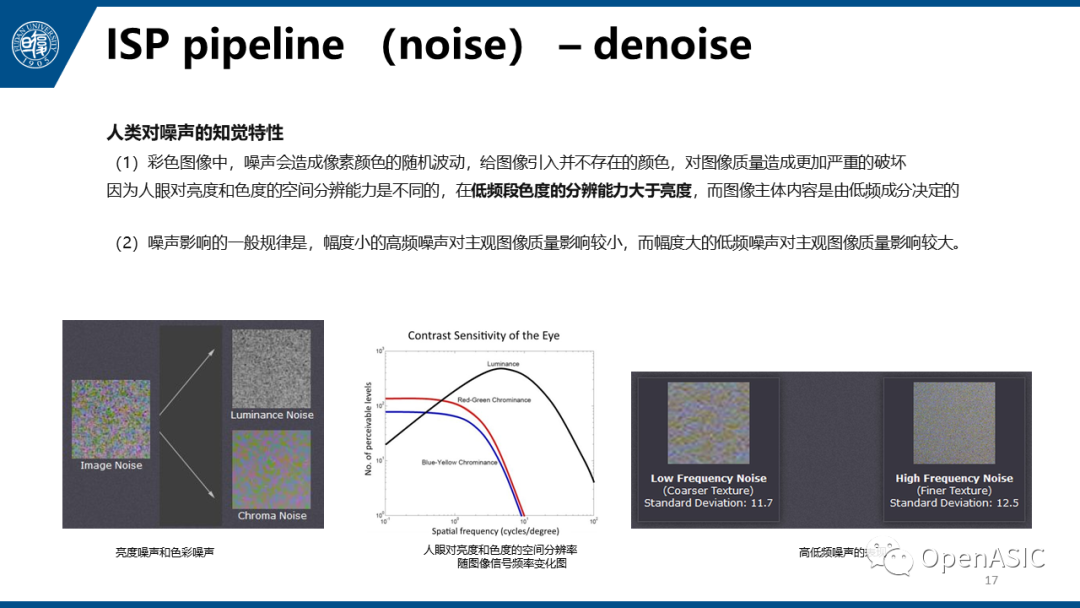
人類對噪聲的知覺特性對去噪算法的設(shè)計具有指導(dǎo)意義:
(1)人眼對亮度和色度的空間分辨能力是不同的,在低頻段對色度的分辨能力大于亮度,而圖像主體內(nèi)容是由低頻成分決定的。
(2)噪聲影響的一般規(guī)律是幅度小的高頻噪聲對主觀圖像質(zhì)量影響較小,而幅度大的低頻噪聲對主觀圖像質(zhì)量影響較大。
因此基本的去噪假設(shè)是對于畫面中的平坦區(qū)域(Homogeneous Area), 也就是圖像低頻成分,認(rèn)為像素變化主要是由噪聲引起的,可以加大降噪力度;對于畫面中的紋理區(qū)域(Textured Area), 也就是圖像高頻成分即細(xì)節(jié),認(rèn)為像素變化主要是由紋理引起的,噪聲只占較小部分,需要控制降噪力度,盡量保持圖像的紋理特征。
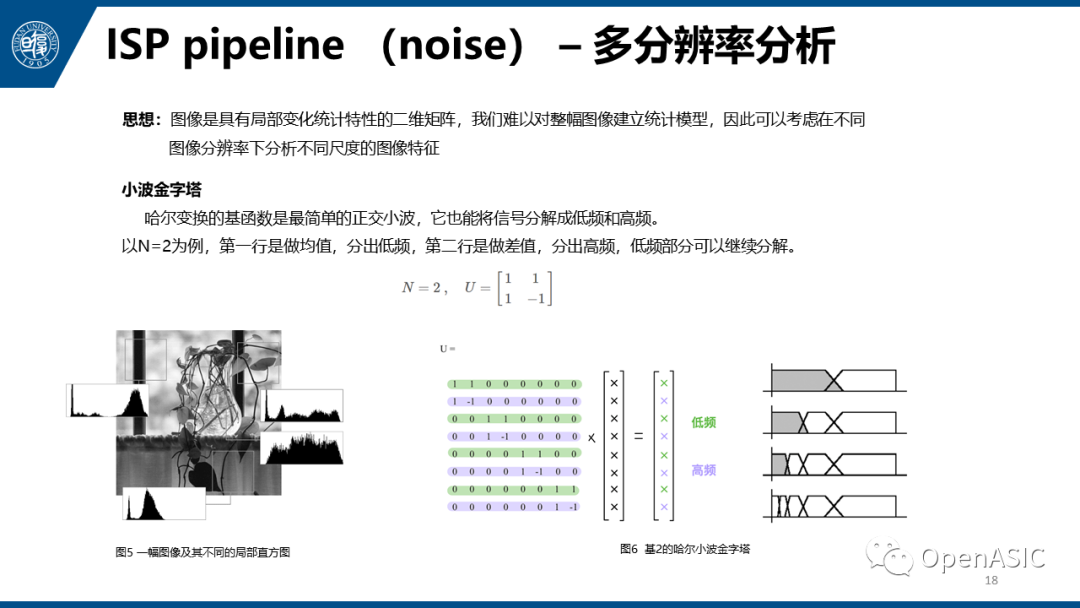
下面簡單介紹一些常用的去噪思路。第一種是多分辨率分析。
多分辨率分析的出發(fā)點(diǎn)是在某種分辨率下無法檢測的特性,在另一種分辨率下便容易檢測。從數(shù)學(xué)角度上看圖像信號,圖像是具有局部變化統(tǒng)計特性的亮度值的二維矩陣,我們難以對整幅圖像建立統(tǒng)計模型,因此可以考慮在不同圖像分辨率下分析不同尺度的圖像特征。
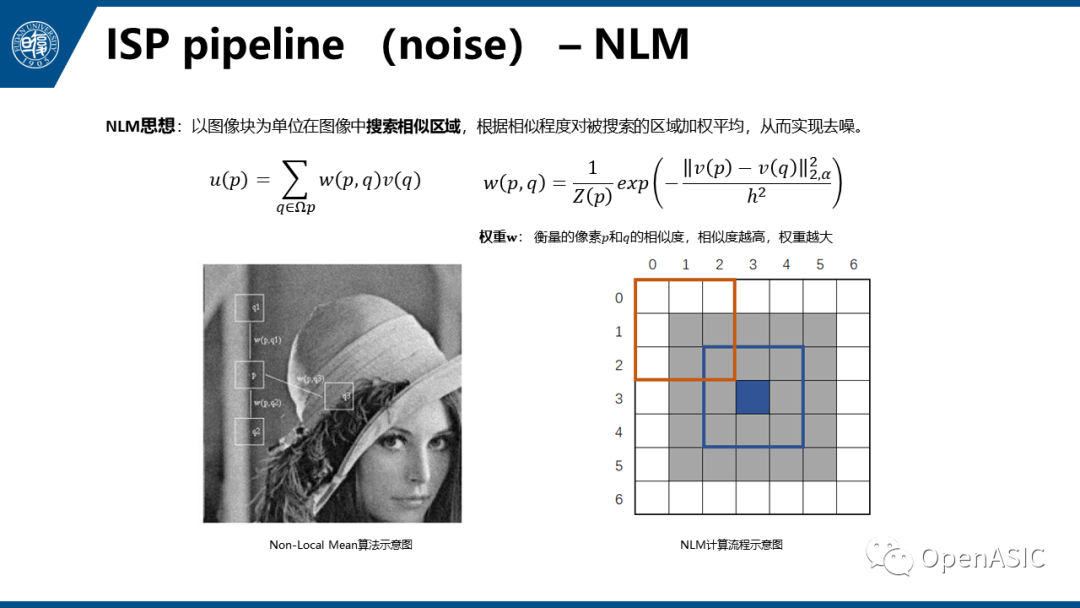
第二種是經(jīng)典的NLM算法。
利用圖像全局的自相似性,以圖像塊為單位在圖像中尋找相似區(qū)域,再對這些區(qū)域求平均,在圖像平滑的基礎(chǔ)上能很好地保持細(xì)節(jié)信息,魯棒性較好。
NLM算法思路如圖所示,式中p代表待去噪像素位置,q代表用于加權(quán)計算的參考像素位置,v(x)表示像素x所在圖像塊構(gòu)成的像素值向量,權(quán)重w(p,q)表示像素p和q之間的相似性,注意兩個像素間的相似性一般都是由對應(yīng)圖像塊的像素值向量v(x)決定的。根據(jù)NLM的思想,因?yàn)?q1和q2像素與待去噪點(diǎn)p像素有更相似的鄰域,而q3像素鄰域與p像素差異較大,因此,對p像素的去噪,q1和q2像素的貢獻(xiàn)更大。
權(quán)重w(p,q)的計算,可以用高斯加權(quán)的歐式距離來衡量,其中α為高斯核函數(shù)的標(biāo)準(zhǔn)差,一般取值為2~5。
最終權(quán)重w(p,q)計算公式如右式所示,式中Z(p)為權(quán)重歸一化常數(shù),參數(shù)h控制指數(shù)函數(shù)的衰減速度,取值與圖像中的噪聲水平σ線性相關(guān),取h=λ?σ,σ為噪聲圖像的標(biāo)準(zhǔn)差。
注意,NLM最后計算待去噪像素p自身所在圖像塊權(quán)重w,即p=q時,取當(dāng)前最大權(quán)重。
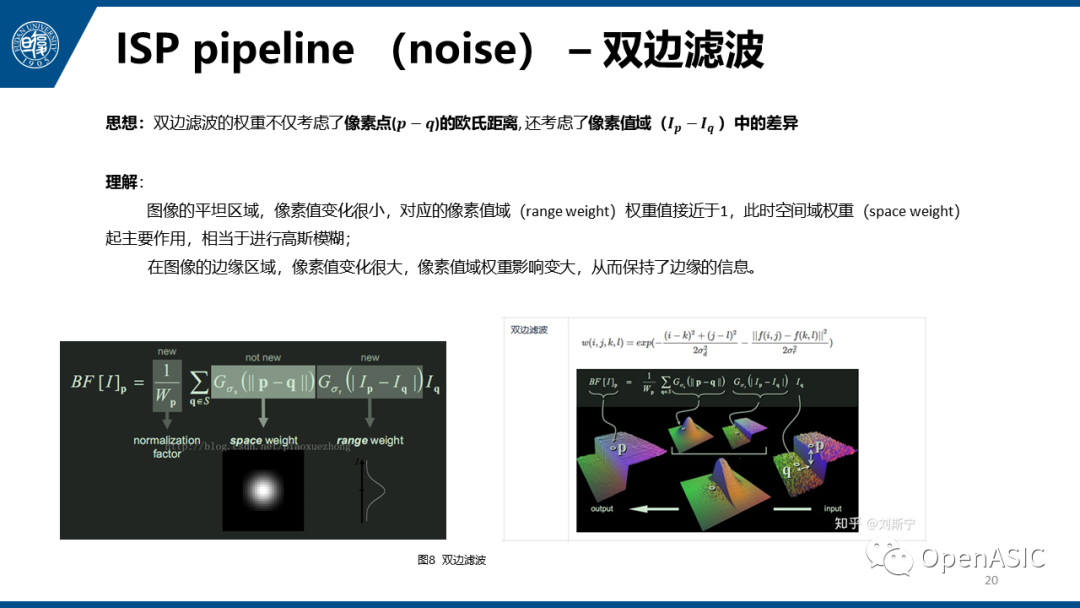
雙邊濾波是在高斯濾波原理的基礎(chǔ)上做了擴(kuò)展,除了考慮像素距離之外,還考慮當(dāng)前像素和周圍像素亮度的差異,對距離近但顏色差異大的像素會分配小的權(quán)重,這樣就得到邊緣保持效果。
雙邊濾波的濾波器設(shè)計由兩個函數(shù)構(gòu)成,一個函數(shù)是由像素幾何空間距離決定空間域?yàn)V波器系數(shù),另一個是由像素差值決定值域?yàn)V波器系數(shù)。公式如圖所示,式中p表示當(dāng)前處理像素位置,q表示鄰域內(nèi)參考像素位置,I表示像素值,G表示高斯核函數(shù),σ為高斯核函數(shù)的方差系數(shù),S代表整張圖像,Wp是權(quán)重值的總和,用于歸一化權(quán)重。從該公式可以看到,在圖像的平坦區(qū)域,像素值變化很小,對應(yīng)的像素值域(Range Weight)濾波器系數(shù)接近于1,此時空間域權(quán)重(Space Weight)起主導(dǎo)作用,相當(dāng)于進(jìn)行高斯模糊;在圖像的邊緣區(qū)域,像素值變化很大,像素值域?yàn)V波器系數(shù)影響變大,變化規(guī)律是隨著像素值差的增大,最終濾波器系數(shù)會減小,從而保持了邊緣的信息。
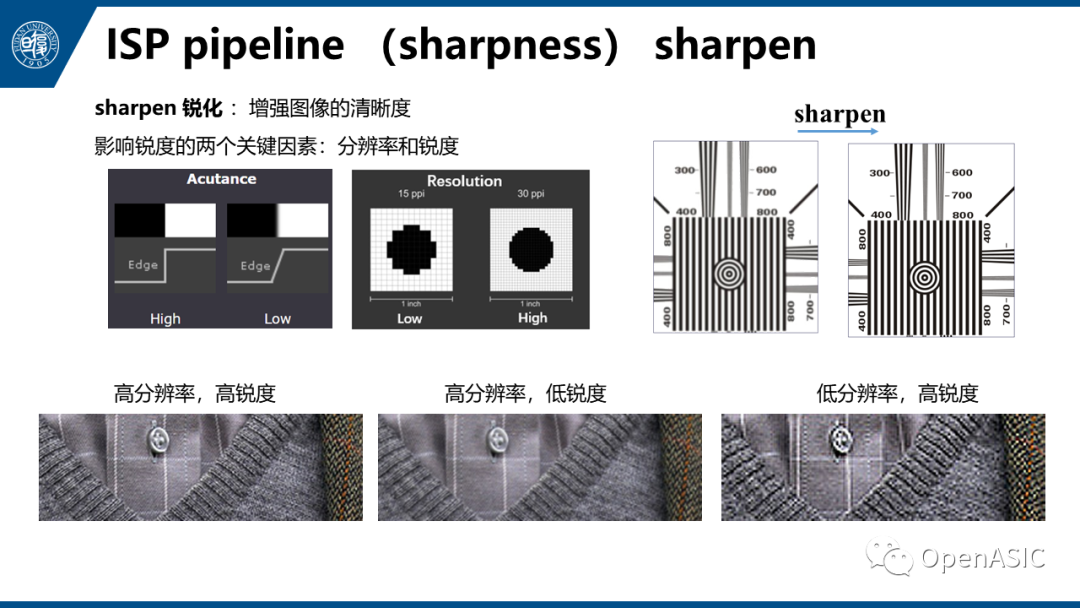
清晰度是圖像質(zhì)量的關(guān)鍵評價指標(biāo)之一,對清晰度定性的理解,可以認(rèn)為它反映了圖像中邊緣和紋理的可分辨程度。對清晰度定量的分析,主要有兩個直接相關(guān)的因素:銳度和分辨率。銳度描述的是圖像邊緣過渡的快慢,過渡越快,銳度越高。分辨率描述的是像素數(shù)量,離散的像素數(shù)量越多,越能逼近真實(shí)世界的連續(xù)信號。
最下邊的一組圖展現(xiàn)不同銳度和分辨率下的圖像感知效果。最左邊,高銳度高分辨率的圖像,紐扣的邊緣清晰可見,能呈現(xiàn)出衣服真實(shí)的紋理。當(dāng)銳度下降,圖像變得模糊;當(dāng)分辨率下降,因?yàn)榛殳B,衣服紋理變得不規(guī)則,不夠細(xì)膩。
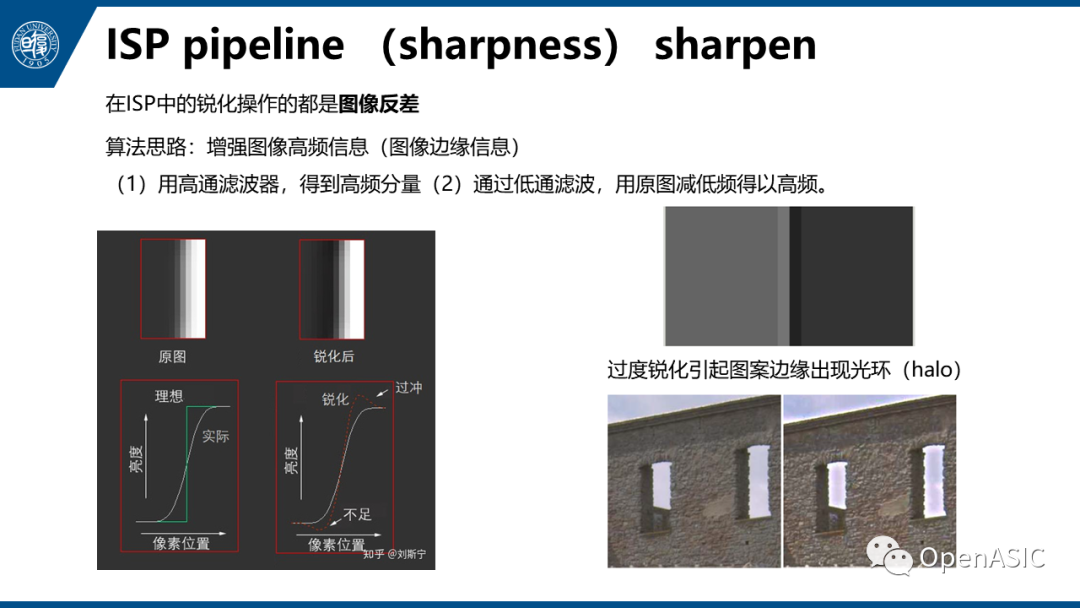
ISP中的銳化處理的都是圖像的銳度,基本思路也就是增強(qiáng)圖像的邊緣對比度。如圖所示,讓邊緣過渡得更劇烈,但就會引入光暈問題,在圖像邊緣出現(xiàn)白邊。

現(xiàn)實(shí)世界的場景豐富多彩,這些場景具有很高的動態(tài)范圍,場景的動態(tài)范圍定義為場景中最亮部分的亮度值與最暗部分的亮度值之比。動態(tài)范圍越廣,圖像中所能表現(xiàn)的層次就越豐富。
但設(shè)備中的顯示位深有限,若左下圖所示,當(dāng)顯示系統(tǒng)的動態(tài)范圍不足時,在圖像捕捉過程中很有可能會發(fā)生鉗位(clipping),如果是亮區(qū)發(fā)生飽和稱為高光鉗位(high light clipping),如果是暗區(qū)發(fā)生鉗位則稱為陰影鉗位(shadow clipping),在同一場景中兩者可能會同時存在。
因此需要使用GTM模塊,在有限動態(tài)范圍媒介上近似顯示高動態(tài)范圍。
此外,如右下圖所示,如果不做色調(diào)映射處理,攝像機(jī)直接輸出最原始的線性圖像,但在人眼看來圖像比正常的要暗,這是因?yàn)槿说囊曈X系統(tǒng)對視野中的暗區(qū)更敏感,視覺系統(tǒng)對暗區(qū)信號做了提升以形成更強(qiáng)烈的知覺。而這個特性也是ISP中引入伽馬校正的來源。
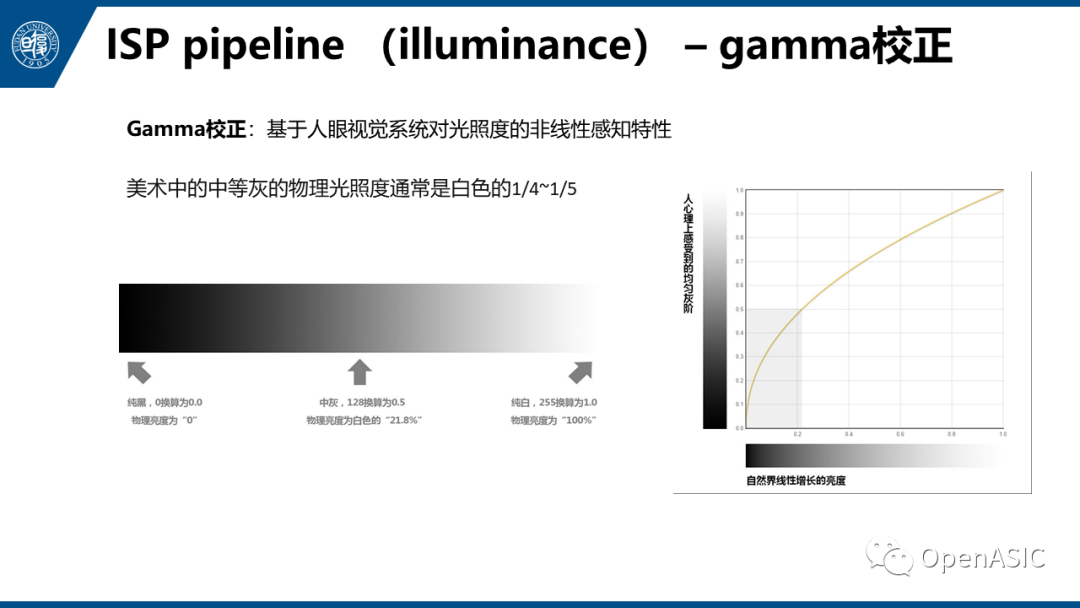
因?yàn)槿搜鄣母兄蔷€性,在圖像顯示結(jié)果上,我們感知的中等灰度實(shí)際只有純白色物理關(guān)照度的1/4~1/5
-
ISP
+關(guān)注
關(guān)注
6文章
478瀏覽量
52015 -
圖像處理器
+關(guān)注
關(guān)注
1文章
104瀏覽量
15561 -
RAW
+關(guān)注
關(guān)注
0文章
21瀏覽量
3842
發(fā)布評論請先 登錄
相關(guān)推薦
嵌入式系統(tǒng)基本概念概述
操作系統(tǒng)原理基本概念
智能天線的基本概念
單片機(jī)中斷的基本概念
STM32的中斷系統(tǒng)基本概念
ARM的體系架構(gòu)基本概念
Blackfin處理器在工業(yè)圖像處理中的設(shè)計應(yīng)用
GIS數(shù)字圖像處理之遙感圖像的基本概念和存儲結(jié)構(gòu)詳細(xì)說明
圖像信號處理器和視覺處理器市場的技術(shù)趨勢
數(shù)字信號處理的基本概念詳細(xì)說明





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論