 協作機器人-功率和力限制
協作機器人-功率和力限制
PFL 代表 功率和力限制。PFL是機器人協同工作并成為協作機器人(協作機器人)的方式之一。PFL的本質是,即使機器人和人類接觸,人類也應該不受傷害。當然,僅僅購買一個合適的機器人是不夠的——如果機器人拿著皮下注射針頭戳你的眼睛,那么再多的 PFL 也無法拯救你。因此,為PFL設計的機器人是協作PFL應用的必要條件,但不是充分條件。
讓我們“備份總線”,回到開頭。安全的首要任務是消除危險(固有安全的設計措施),或者如果無法做到這一點,請使用安全功能(保護)。如果安全功能不能充分降低風險,那么最后一個選項是“警告和通知”。標準中有以下圖形的更全面版本(例如參見RIA TR R15.306-2016),但通常依靠人們閱讀警告或佩戴特殊安全裝備或跟蹤設備處于層次結構的底端。
對于專為協作應用設計的機器人(我們稱之為協作機器人),以嘗試消除協作機器人通常具有的危險
漂亮的圓角,沒有鋒利的邊緣或點
臂(機械手)和臂連接設計用于消除夾點
帶襯墊的柔軟外殼
可變形部件
機器人運動部件的質量最小化
不幸的是,雖然這些通常是有幫助的,但它們還不夠,這就是PFL的用武之地,這就是它變得有趣的地方。通常的功能安全是避免傷害,例如手指被壓碎或手臂骨折甚至死亡。那么機器人在造成傷害之前能有多難受。每天被打100次,但只是輕微的打擊,這是可以接受的嗎?100 次微小的撞擊等同于一次非常好的推動嗎?ISO TS 15066對此提供了一些指導,以幫助機器人安全標準ISO 10218:2011中已有的指導,并使用疼痛作為閾值而不是傷害。我當然想避免傷害,但我也不熱衷于疼痛,所以就個人而言,我很高興標準使用疼痛而不僅僅是傷害作為衡量標準。
然后,ISO TS 15066 給出了不同身體位置的限制,總共約 30 個。盡管上面圖片顯示了什么,但我相信志愿者被蒙住眼睛,有耳塞,所以他們不知道什么時候會有撞擊。
兩種類型的沖擊被認為是瞬態的(無夾緊 - 發生在自由空氣中)和準靜態(夾緊)以及兩者的限制。使用瞬態一詞是因為所涉及的力達到峰值,然后在不涉及陷阱時迅速回落到零,對于準靜態情況,力和壓力將上升,然后當身體部位被夾緊時通常保持在那個高水平,直到你解放你的手。
最大許可準靜態接觸標準中的限制示例包括
上臂和肘關節 – 三角肌 150N 和肱骨 220N。
前臂肌肉 – 150N
手和手指一般為140N
小腿,包括脛骨中部 – 130N
該標準在與頭部接觸時似乎有些矛盾,說必須防止它,但仍然給出限制。如果無論力如何都可以與眼睛接觸,則很難反對使用安全護目鏡或類似物。然而,我確實在YouTube上看到了視頻,這些視頻似乎以協作機器人在桌子上以PFL模式工作,人們坐在他們旁邊。對我來說,與操作員負責人的接觸看起來完全不受阻礙。
我看過其他文章,說人頭最弱的骨頭是鼻骨,骨折力為342N,并引用337N作為頸部甲狀腺和環狀軟骨的斷裂力。
與PFL相關的安全功能的典型要求是PL d CAT 3,即使我討厭看到強制要求類別。
與我在之前的博客中討論的SSM相比,使用PFL的協作機器人通常移動得慢得多,這是因為功率和力與速度具有平方定律關系(速度加倍會使力翻兩番)。因此,降低速度是限制撞擊過程中功率和力的關鍵方法。該速度的測量和限制本身就是一項安全功能,必須達到或超過PFL模式要求的SIL或PL。機器人可以在沒有人靠近時自由使用SSM(速度和分離監控 - 請參閱我最近關于該主題的博客),然后在有人靠近時切換到PFL模式。這樣的組合可以提供最大的生產力。但是,請注意,有時僅將機器人放在籠子中可能會更有效率。
RIA R15.806中給出了功率受限協作應用的驗證方法(我不確定這是否與ISO PAS 5672相同)。需要1N的最小分辨率和1KHz的帶寬。YouTube上有視頻,似乎顯示機器人超過了這些限制。
最后警告 – 無論機器人/協作機器人內置的功能如何,應用程序都決定了一切。如果機器人拿著刀或雜耍炸藥PFL不足以拯救你,你需要一種不同形式的安全(也許是不同的工作場所)。
AGV/AMR/IMR和其他移動機器人的標準沒有這樣的限制,但如果它們能與人碰撞,那么應用相同的限制似乎是合乎邏輯的,也許專注于小腿和小腿。
EN 16005涵蓋自動門與ISO 10218 / ISO TS 15066中的限制相似,如果相對邊緣之間的間隙為<400mm,則限制為200N,如果間隙為>1400mm,則限制為500N。
ISO 13482個人護理機器人標準也談到了限制,這表明要求延伸到工業機器人之外。
我還看到了新標準的草案,ISO / DIS 21260,標題為“機械安全 - 移動機械或機械與人員運動部件之間物理接觸的機械安全數據”,該標準遵循ISO 13849-1或IEC 62061限制接觸條件的傳感器和控制系統。該標準在附錄C中還包含一個家用AGV的很好的例子。
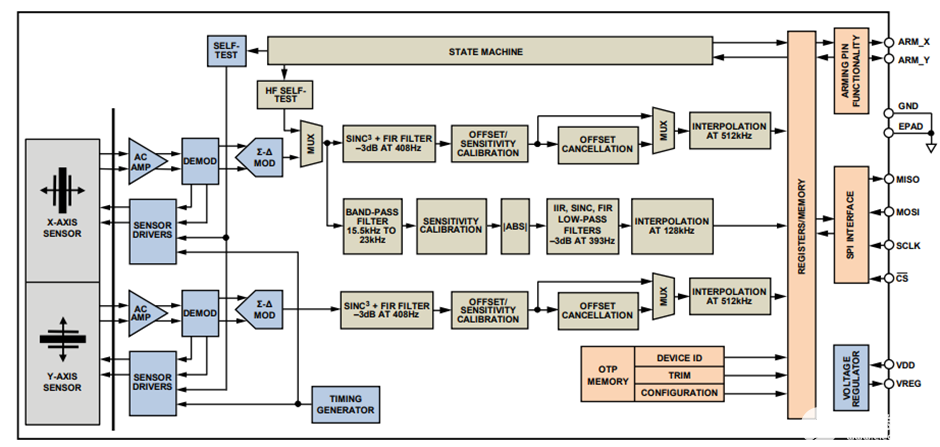
圖4 - X軸上具有聲通道的ADXL195加速度計
我了解了加速度計的功能安全性,一個明顯的問題是加速度計是否在這一領域有用。那么問題就變成了,你能知道你撞到某物的力度有多大(你減速的強度有多大),甚至只是你是否及時撞到了某物以停止并可能倒車。這種汽車目標部件還可以在減速開始之前測量保險杠中任何變形的噪音(在汽車中可能效果更好)。如果我沒記錯的話,響應時間是 2 毫秒,安全氣囊展開需要在 30 毫秒內完成。對于以5公里<行駛的mobot來說,30ms是大量的時間,2ms代表2.7mm的向前運動。有趣的是,像這樣的傳感器以與汽車前部成45度角安裝在汽車中。因此,全正面碰撞應導致 X 軸積極響應,Y軸負響應,但數量相同。通過這種方式,您可以分辨出撞擊發生的方向并展開安全氣囊。對于一個mobot,我想你會停止移動或倒車。對于非常高的機器人,我相信如果碰撞發生在地面附近的激光掃描儀未檢測到的架空架子上,這也應該有效。
ISO 5672的最新草案給出了一些可能發生意外影響的很好的例子,包括:
當有人認為機器人試圖撿起的物體未對齊時,他們會把手伸到機器人抓手下面。然后,它們的手可以在夾具和桌子之間或夾持器本身內被壓碎。
有人躲進去撿起機器人掉落的東西,當機器人移動時被機器人擊中背部
有人在移動機器人翻車之前沖進去撿東西
所有這些似乎都是完全合理的,事實上,人性使它們難以避免,因此需要安全功能。
審核編輯:郭婷
-
傳感器
+關注
關注
2553文章
51407瀏覽量
756631 -
機器人
+關注
關注
211文章
28646瀏覽量
208428 -
加速度計
+關注
關注
6文章
704瀏覽量
46025
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
MiR推出MC600移動協作機器人
協作機器人TM25S:高效人機協作改變傳統作業方式

協作機器人要實現0.03mm路徑精度有多難
協作機器人在焊接領域重要的八個原因
優傲機器人升級高負載協作機器人,助力客戶生產效率飛躍
海默機器人榮膺第十屆恰佩克獎,展現協作機器人創新力量

協作機器人在食品和飲料中的的應用
泰科機器人攜新款行星滾柱絲杠線性關節模組和雙臂協作機器人亮相2024年ITES深圳工業展

海默機器人榮獲“中國協作機器人創新產品獎”:創新引領,智造未來





 工商網監
工商網監
評論