") 用于高效電機(jī)控制的無(wú)傳感器矢量控制技術(shù)繼續(xù)發(fā)展
用于高效電機(jī)控制的無(wú)傳感器矢量控制技術(shù)繼續(xù)發(fā)展
作者:Anders Norlin Frederiksen
以電機(jī)和功率級(jí)動(dòng)力學(xué)為中心的高級(jí)建模技術(shù)可以顯著提高電機(jī)控制效率,確保實(shí)時(shí)適應(yīng)系統(tǒng)行為波動(dòng)的精確控制。通過(guò)應(yīng)用無(wú)傳感器矢量控制技術(shù),設(shè)計(jì)人員可以提高電機(jī)系統(tǒng)的性能并降低功耗,并符合旨在提高能源效率的新興政府法規(guī)。由下一代數(shù)字信號(hào)處理技術(shù)實(shí)現(xiàn)的新電機(jī)控制方案有望加速先進(jìn)控制方案的采用。
在過(guò)去十年中,高度暴露的永磁材料的開發(fā)和更容易部署推動(dòng)了許多工業(yè)應(yīng)用中永磁同步電機(jī)(PMSM)在高性能變速電機(jī)中的使用。使用 PMSM 驅(qū)動(dòng)器的固有優(yōu)勢(shì)包括高扭矩重量比、高功率因數(shù)、更快的響應(yīng)、堅(jiān)固的結(jié)構(gòu)、易于維護(hù)、易于控制和高效率。高性能速度和/或位置控制需要準(zhǔn)確了解轉(zhuǎn)子軸的位置和速度,以便將相位激勵(lì)脈沖同步到轉(zhuǎn)子位置。這意味著需要速度和位置傳感器,例如連接到電機(jī)軸上的絕對(duì)編碼器和磁性旋轉(zhuǎn)變壓器。然而,在大多數(shù)應(yīng)用中,這些傳感器存在一些缺點(diǎn),例如可靠性降低、易受噪聲影響、額外的成本和重量以及驅(qū)動(dòng)系統(tǒng)的復(fù)雜性增加。無(wú)傳感器矢量控制消除了對(duì)速度/位置傳感器的需求,克服了這些挑戰(zhàn)。
近年來(lái),研究文獻(xiàn)中提出了幾種解決方案,重點(diǎn)是PMSM的速度和位置無(wú)傳感器方法。已經(jīng)開發(fā)了三種基本技術(shù)來(lái)估計(jì)永磁同步電機(jī)驅(qū)動(dòng)器的無(wú)傳感器轉(zhuǎn)子位置:
基于反電動(dòng)勢(shì)(反電動(dòng)勢(shì))估計(jì)的各種技術(shù)
基于狀態(tài)觀察器和擴(kuò)展卡爾曼濾波(EKF)的技術(shù)
基于實(shí)時(shí)電機(jī)建模的其他技術(shù)
反電動(dòng)勢(shì)技術(shù)
基于反電動(dòng)勢(shì)技術(shù)的位置估計(jì)根據(jù)電壓和電流估計(jì)磁通和速度,這對(duì)低速范圍內(nèi)的定子電阻特別敏感。由于機(jī)器的反電動(dòng)勢(shì)小,開關(guān)器件的非線性特性產(chǎn)生的系統(tǒng)噪聲,幾乎無(wú)法檢測(cè)到機(jī)器終端上的實(shí)際電壓信息。反電動(dòng)勢(shì)方法在中高速和高速中產(chǎn)生良好的位置估計(jì),但在低速區(qū)域則失敗。
反電動(dòng)勢(shì)電壓的大小與轉(zhuǎn)子速度成正比,因此在靜止時(shí)無(wú)法估計(jì)初始位置。因此,從未知的轉(zhuǎn)子位置啟動(dòng)可能伴隨著暫時(shí)的反向旋轉(zhuǎn)或可能導(dǎo)致啟動(dòng)失敗。由于EKF能夠?qū)ι婕半S機(jī)噪聲環(huán)境的非線性系統(tǒng)進(jìn)行狀態(tài)估計(jì),因此對(duì)于PMSM的速度和轉(zhuǎn)子位置的在線估計(jì),EKF似乎是一種可行且計(jì)算高效的候選者。
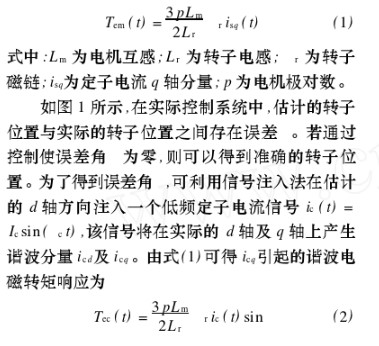
基于使用磁顯著性的空間顯著性跟蹤的技術(shù)適用于零速運(yùn)行,并且可以在沒(méi)有參數(shù)影響的情況下估計(jì)初始轉(zhuǎn)子位置。對(duì)于轉(zhuǎn)子初始位置,主要有兩種基本方法,基于使用脈沖信號(hào)注入或正弦載波信號(hào)注入。
讓我們看一個(gè)例子。
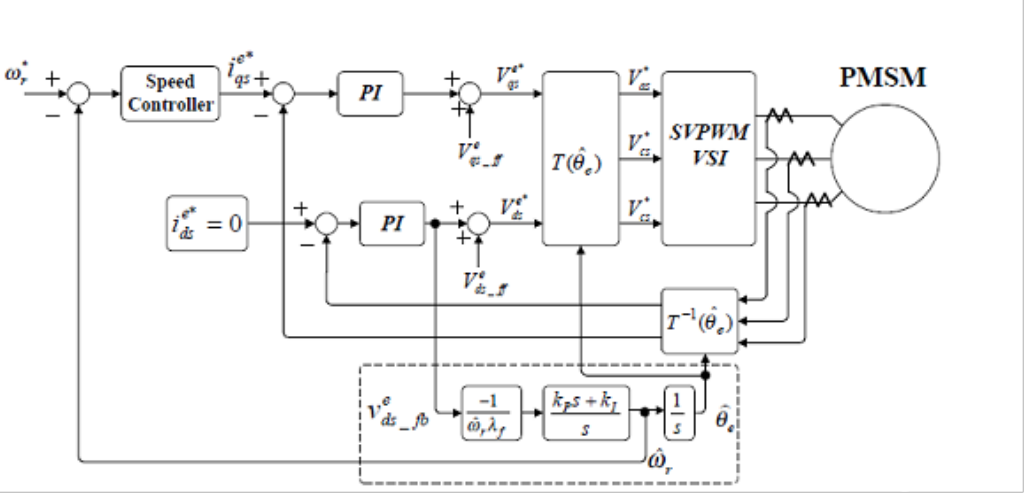
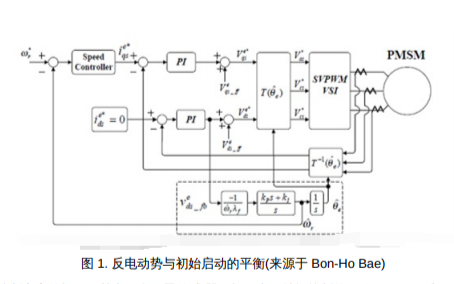
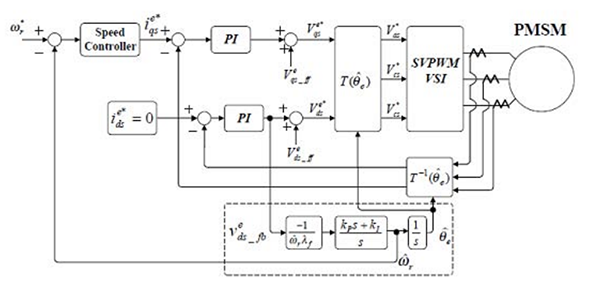
圖1.反電動(dòng)勢(shì)和初始啟動(dòng)的平衡(歸因于Bon-Ho Bae)。
圖1顯示了不帶位置傳感器的無(wú)傳感器矢量控制方案的框圖。在框圖中,前饋?lái)?xiàng) Vds_ff和 Vqs_ff,對(duì)于軸之間的控制,方程可以構(gòu)造為:


其中 ωr是轉(zhuǎn)子的速度。
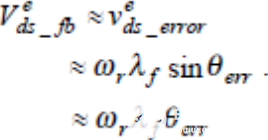
僅查看內(nèi)部永磁同步電機(jī)(IPMSM)的標(biāo)準(zhǔn)電壓方程,參考系由下式表示:


與 θ犯 錯(cuò)是真實(shí)角度和估計(jì)角度之間的角度差。
現(xiàn)在重新定位 d 軸時(shí),我們發(fā)現(xiàn):

定義電流PI穩(wěn)壓器將產(chǎn)生一個(gè)小誤差 - θ犯 錯(cuò)很小,D 軸可以表示為:
在圖1的估計(jì)器和推導(dǎo)方程中,誤差信號(hào)Vds_error由PI補(bǔ)償器處理,得出轉(zhuǎn)子的速度,通過(guò)積分估計(jì)的速度計(jì)算轉(zhuǎn)子的角度。在其他傳統(tǒng)方法中,微分過(guò)程用于計(jì)算速度,但這使得系統(tǒng)容易受到噪聲的影響。在Bon-Ho Bae的研究中,實(shí)驗(yàn)研究表明,所提出的估算器為應(yīng)用提供了非常準(zhǔn)確和強(qiáng)大的速度信息。但在零速和低速時(shí),反電動(dòng)勢(shì)電壓不足以滿足所提出的矢量控制。因此,為了從零速無(wú)縫運(yùn)行,電流以恒定的幅度和預(yù)模式的頻率進(jìn)行控制。這里,同步參考系的角度是通過(guò)對(duì)頻率進(jìn)行積分(初始啟動(dòng)方法)得出的。
EKF技術(shù)
讓我們看另一個(gè)例子,現(xiàn)在使用 EKF 技術(shù)原理(歸功于 Mohamed Boussak),并再次與初始啟動(dòng)相結(jié)合。
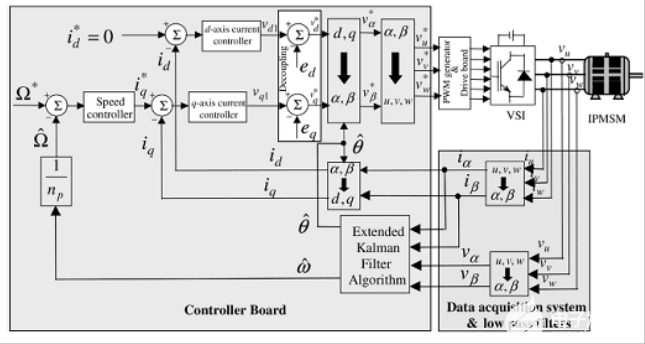
圖2.
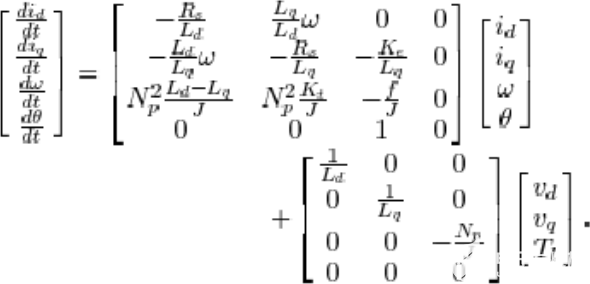
從PMSM的基礎(chǔ)知識(shí)開始,并將其重寫為四階動(dòng)態(tài)模型,我們得到:

哪里:

永磁同步電機(jī)產(chǎn)生的扭矩為:

動(dòng)態(tài)模型基于一些簡(jiǎn)單的假設(shè) - 忽略正弦反電動(dòng)勢(shì)和渦流,現(xiàn)在給出:
d軸和q軸電流不能由Vd和Vq電壓獨(dú)立控制,因?yàn)閮蓚€(gè)軸之間的交叉耦合效應(yīng)如圖2所示。對(duì)于高性能速度控制,需要應(yīng)用具有去耦前饋補(bǔ)償?shù)膁軸和q軸電流調(diào)節(jié)器。有關(guān)更多詳細(xì)信息,請(qǐng)參見圖 3。
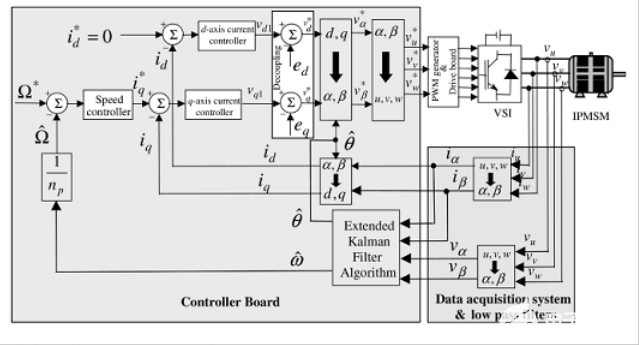
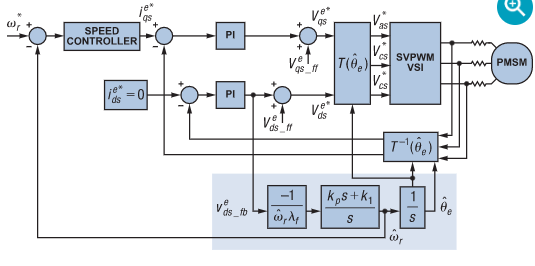
圖3.
d 軸參考電流 i*d設(shè)置為零,以最大化 IPMSM 的扭矩與電流比。q軸參考電流i*q通過(guò)調(diào)速器從速度誤差得到,如圖3所示。電流調(diào)節(jié)器的輸出在旋轉(zhuǎn)參考系中提供參考電壓。在圖3的框圖中,前饋?lái)?xiàng)ed和 eq,用于解耦控制,由下式給出:

正如Boussak所描述的,兩種補(bǔ)償(電流控制和電壓指令)是確保穩(wěn)定和最佳控制的重要因素——增強(qiáng)矢量控制和弱磁控制。
EKF因其簡(jiǎn)單性、最優(yōu)性、可追蹤性和魯棒性而成為非線性系統(tǒng)跟蹤和估計(jì)最廣泛使用的方法之一。為了實(shí)現(xiàn)對(duì)突出極IPMSM的無(wú)傳感器控制,使用EKF來(lái)估計(jì)速度和轉(zhuǎn)子位置。電機(jī)的線路電壓和負(fù)載轉(zhuǎn)矩是系統(tǒng)的矢量輸入變量。速度和轉(zhuǎn)子位置是要估計(jì)的兩個(gè)量級(jí),它們與電機(jī)電流一起構(gòu)成狀態(tài)矢量。電機(jī)電流將是構(gòu)成輸出矢量的唯一可觀測(cè)幅度。
對(duì)于無(wú)傳感器IPMSM驅(qū)動(dòng)器的EKF實(shí)施,選擇雙軸參考框架至關(guān)重要。理想的情況是使用連接到轉(zhuǎn)子的 d 軸和 q 軸旋轉(zhuǎn)參考系。該解決方案與IPMSM無(wú)傳感器速度控制不兼容,因?yàn)楣浪闫鞯妮斎胧噶浚娏骱碗妷海┤Q于轉(zhuǎn)子位置。在實(shí)現(xiàn)中觀察到,轉(zhuǎn)子初始位置的估計(jì)誤差可能會(huì)在EKF相對(duì)于實(shí)際系統(tǒng)的進(jìn)度中引起誤差,從而產(chǎn)生嚴(yán)重影響。
在這種情況下,Boussak建議將IPMSM控制與轉(zhuǎn)子參考系對(duì)齊。速度和位置僅使用定子電壓和電流的測(cè)量值來(lái)估計(jì)。基于 EKF 的觀察者使用電機(jī)模型,其數(shù)量在固定參考系中α-β連接到定子框架,因此與轉(zhuǎn)子位置無(wú)關(guān)。推導(dǎo)了靜止參考系中IPMSM的非線性動(dòng)態(tài)狀態(tài)模型,以完成估計(jì)器:

兩個(gè)定子電流,電速度和位置被用作系統(tǒng)狀態(tài)變量(更高級(jí)的計(jì)算方案可以在Boussak的工作中找到)。
Bon-Ho Bae和Boussak開發(fā)的部署方法使無(wú)傳感器控制器的可行性保持一致,將更高級(jí)的建模引入實(shí)時(shí)電機(jī)控制方案。在過(guò)去五年中,微控制器和DSP制造商一直高度專注于通過(guò)新型嵌入式處理器提供足夠的性能和必要的功能。這些是使設(shè)計(jì)人員能夠在現(xiàn)實(shí)世界中應(yīng)用現(xiàn)代矢量控制的關(guān)鍵因素。
電機(jī)效率始于處理器
如今,ADI公司新ADSP-CM40x ARM Cortex-M4系列等處理器的增強(qiáng)功能正在實(shí)現(xiàn)性價(jià)比平衡,使更復(fù)雜的電機(jī)控制算法的實(shí)現(xiàn)開始在大批量解決方案中獲得牽引力。特別是在處理器功能方面,內(nèi)置數(shù)字濾波器功能、高性能浮點(diǎn)功能和擴(kuò)展的數(shù)學(xué)功能都允許更復(fù)雜的組合算法來(lái)創(chuàng)建更好的控制器和控制方案,從而將電機(jī)驅(qū)動(dòng)器的效率推近 100%。在行業(yè)內(nèi),毫無(wú)疑問(wèn),運(yùn)行基于實(shí)時(shí)模型的估計(jì)器的多個(gè)觀察者模型的增強(qiáng)將有助于提高(i)驅(qū)動(dòng)器的性能,(ii)系統(tǒng)效率和拓?fù)洌约埃╥ii)設(shè)計(jì)的部署方法。關(guān)于(iii),像MATLAB/Simulink這樣的圖形系統(tǒng)今天能夠簡(jiǎn)化設(shè)計(jì)流程并增強(qiáng)新算法的開發(fā)。這些工具與執(zhí)行處理器一起,可以實(shí)現(xiàn)更復(fù)雜的部署。與內(nèi)核速度、模數(shù)轉(zhuǎn)換分辨率和內(nèi)存集成相關(guān)的處理器級(jí)增強(qiáng)功能將為設(shè)計(jì)人員提供能力和精度,以實(shí)現(xiàn)更高的質(zhì)量和更高的性能目標(biāo),同時(shí)加快上市時(shí)間。?
隨著ADI公司最近推出的ADSP-CM40x系列混合信號(hào)嵌入式控制器,在降低價(jià)格的同時(shí),也實(shí)現(xiàn)了顯著的處理性能提升,為以前由性能受限的處理器和微控制器提供服務(wù)的電機(jī)控制應(yīng)用帶來(lái)了DSP級(jí)性能。電機(jī)系統(tǒng)設(shè)計(jì)人員將利用這種性能曲線,通過(guò)使用更先進(jìn)的算法來(lái)實(shí)現(xiàn)更高的系統(tǒng)功能和精度,這些算法可用于準(zhǔn)確確定轉(zhuǎn)子軸的位置和速度,從而消除系統(tǒng)中對(duì)位置/速度傳感器的需求。
ADSP-CM40x體現(xiàn)了上述趨勢(shì),即提高片內(nèi)集成度,例如用于精確數(shù)據(jù)轉(zhuǎn)換和建模精度的世界級(jí)分辨率ADC,以及用于進(jìn)一步加快算法處理速度的集成閃存,這兩種方法都最大限度地減少了片外組件并降低了整體系統(tǒng)成本。處理器提供性能和片上集成的最佳組合,使設(shè)計(jì)人員能夠?qū)崿F(xiàn)許多系統(tǒng)級(jí)設(shè)計(jì)目標(biāo),包括實(shí)時(shí)處理更多數(shù)據(jù)、減少延遲、將處理任務(wù)整合到單個(gè)處理器,以及更靈活地優(yōu)化系統(tǒng)接口和控制功能。
如今,新技術(shù)正在推動(dòng)電機(jī)系統(tǒng)功能的范式轉(zhuǎn)變,平衡設(shè)計(jì)拓?fù)浜吞幚砥鲗傩裕詫?shí)現(xiàn)更高的整體系統(tǒng)性能和效率。高性能處理器/DSP 使現(xiàn)代高效的控制理論能夠用于高級(jí)系統(tǒng)建模,確保任何實(shí)時(shí)電機(jī)系統(tǒng)的最佳功率和控制效率。無(wú)傳感器矢量控制的廣泛應(yīng)用現(xiàn)已觸手可及,并有望加速全球向更節(jié)能、更高性能的工業(yè)設(shè)備發(fā)展的趨勢(shì)。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2553文章
51407瀏覽量
756644 -
處理器
+關(guān)注
關(guān)注
68文章
19409瀏覽量
231202 -
電機(jī)
+關(guān)注
關(guān)注
142文章
9088瀏覽量
146385
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
將無(wú)傳感器矢量控制與BLDC和PMS電機(jī)結(jié)合使用,提供精確運(yùn)動(dòng)控制
無(wú)位置傳感器的永磁同步電機(jī)矢量控制技術(shù)
異步電機(jī)的無(wú)速度傳感矢量控制設(shè)計(jì)
面向高效電機(jī)控制的無(wú)傳感器矢量控制技術(shù)繼續(xù)發(fā)展
基于滑模觀測(cè)器的無(wú)傳感器矢量控制技術(shù)
基于MRFAS模型的感應(yīng)電機(jī)無(wú)速度傳感器矢量控制系統(tǒng)
基于MATLAB的無(wú)速度傳感器矢量控制仿真
基于DSP的異步電機(jī)無(wú)速度傳感器矢量控制系統(tǒng)的研究與實(shí)現(xiàn)
面向高效電機(jī)控制的無(wú)傳感器矢量控制技術(shù)繼續(xù)發(fā)展
基于低頻信號(hào)注入方法實(shí)現(xiàn)極低速段異步電機(jī)無(wú)速度傳感器矢量控制
面向高效電機(jī)控制的無(wú)傳感器矢量控制技術(shù)繼續(xù)發(fā)展
用于超高效電機(jī)控制的無(wú)傳感器矢量控制技術(shù)
異步電機(jī)無(wú)速度傳感器矢量控制學(xué)習(xí)

面向高效電機(jī)控制的無(wú)傳感器矢 量控制技術(shù)繼續(xù)發(fā)展





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論