 數字電源排序設計選擇如何影響設計過程后期的靈活性
數字電源排序設計選擇如何影響設計過程后期的靈活性
電源排序是數字電源架構的關鍵組件。在這篇文章中,我們將介紹幾種構建排序的方法及其后果。特別是,我們將看到設計選擇如何影響設計過程后期的靈活性。
電源轉換的構建模塊
讓我們來看看我們的電源構建塊和工具,看看我們可以為自己制造什么樣的麻煩。為了簡單起見,讓我們假設我們有一個通用電源模塊(UPB),以及所有常見的罪魁禍首,如FPGA和微控制器以及邏輯。我們的UPB有一個簡單的界面:

圖1.電源塊
我們簡單的電源轉換器具有單V在/V外、一個 PMBus 接口、一個輸入信號:控制,以及兩個輸出信號:電源良好和故障/。
控制
控制信號打開和關閉輸出。它是高電平有效,具有內部上拉。
電源良好
當輸出通電時,電源良好信號為高電平,并且在有效范圍內。
故障/
FAULT/信號為低電平有效,漏極開路,并在電源模塊發生故障時置位。如果存在故障,則斷言 ALERT/,并且可以通過 PMBus 讀取故障。并非所有電源轉換器都會同時具有電源良好和故障/,我們不需要兩者。在幾乎所有情況下,FAULT/都可以成為POWER GOOD的特技替身。
設計一
現在讓我們構建一些東西,這樣我們就可以拆除它并構建另一個,每次都變得更好。
假設我們有一個帶有中間總線控制器 (IBC) 和以下導軌的系統:
785
295
5.0V
3.3V
1.2V
0.8V
我們決定將軌道構建為層次結構。但是,我們需要不同的上電控制結構。
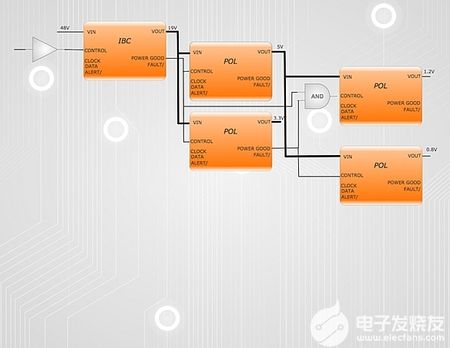
圖2.簡單的電源結構
不要擔心權力層次結構是否正確,或者邏輯對于任何實際設計是否正確。重要的是這種“類型”結構的影響。讓我們考慮一下這樣做的利弊。
在專業方面,這很簡單,無論是在概念上還是在實現上。使用 FPGA 或 uP 的 GPIO 添加 LED 指示燈或讀取電源良好非常容易。如果出現問題,電源良好會讓系統知道軌道出現故障。
在缺點方面,如果發生故障,并且系統必須關閉所有電源,則別無選擇,只能按照上電的順序關閉它們。這意味著大多數下游電源軌將因斷電而不是控制引腳而斷電。
沒有時序控制,因此必須添加額外的電路以在電源軌之間產生延遲。如果在電源軌之間添加了延遲,則該延遲僅適用于通電,因為在斷電時,饋線導軌上的斷電將在 POWER GOOD 將其斷開之前將其從屬電源軌斷開。
如果你對這種“類型”的結構犯了任何錯誤, PCB將需要重新布局, 當你在等待的時候, 你別無選擇,只能在你的設計上破解電線, 或者去喝一個很長的咖啡休息時間.
設計二
如果我們集中邏輯,我們可以做得更好。可編程器件(如FPGA或uP)可以管理所有邏輯。
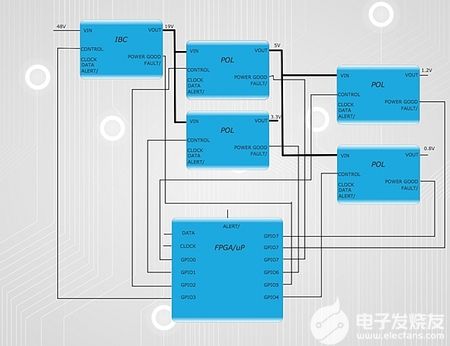
帶控制器的電源結構
由于所有邏輯線都路由到 GPIO,控制器可以完全控制排序順序(打開和關閉),并完全控制時序。只要愿意更改Verilog或C代碼,就可以更改它。我已經在控制器上指示了 PMBus,但沒有繪制所有連接,但使用 PMBus,控制器現在還可以控制電平和故障行為。
在專業方面,這種設計很靈活,你不會被困住。如果在控制結構中出錯,可以在不重新布局的情況下修復它。
在缺點方面,您必須更改Verilog或C,并可能重新測試和重新鑒定固件。這種設計還需要大量的路由。每個 POL 需要 5 條控制線,它們分別路由到控制器。假設我們有一個 20 個軌道系統,考慮到 PMBus,它需要 42 個 GPIO 引腳。
所以這種設計是靈活的,但需要大量的GPIO和大量的PCB空間。
設計三
當與 PMBus 和智能數字電源 POL 結合使用時,我們可以通過使用開漏控制的特性來簡化控制器。
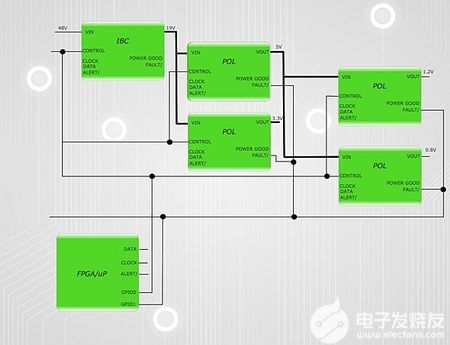
簡化的控制器
所有控制引腳都連接在一起,所有故障/引腳連接在一起。這意味著一個 20 個軌道系統只需要 5 個連接。IO 引腳數量減少了 8 倍。
讓我們看看這是如何工作的。控制引腳為高電平有效。它由 GPIO0 控制,GPIO0 設置為“漏極開路”。由于控制引腳為漏極開路,這意味著POL也可以將其拉低。
當POL復位時,它將控制引腳拉低,直到它準備好響應外部信號。這意味著,如果控制器速度太快,則在全部正確復位之前,所有 POL 都不會打開,最慢的 POL 復位確定系統何時通電。如果控制器速度較慢,則在釋放控制線時控制電源啟動。
您可能想知道排序。我們是否失去了對它的控制?否,因為 PMBus 具有TON_DELAY命令,其值通常存儲在 POL 的 NVM 中。它可以由控制器設置,也可以使用外部工具存儲在 NVM 中。
故障/引腳也是漏極開路,由GPIO1控制,它們既是輸入又是輸出。這意味著當任何電源軌發生故障時,當FAULT引腳被拉低時,所有電源軌都會得到通知。此外,當故障/被拉低時,警報/斷言。因此,控制器知道存在故障。每個人都知道,這是這個設計的關鍵。
現在,您可以選擇幾個有關故障處理的選項。PMBus 可以使用警報響應地址 (ARA) 響應 ALERT/,該地址獲取具有故障的所有 POL 的地址,然后查詢每個 POL 以獲取故障信息。然后,它可以使用決策樹,并根據需要以任何順序關閉軌道。或者它可以一次關閉所有電源軌,讓PMBus TOFF_DELAY管理時序。
許多POL具有增強的故障管理功能,可以直接響應故障(請記住,FAULT/也是一個輸入)。典型的響應是:
重試
立即關閉
斜坡關閉
當POL具有這些高級功能時,它減輕了Verilog或C代碼的負擔,因為POL可以使用外部工具(通過PMBus和外部接口和軟件)進行編程。此外,當使用FAULT/引腳時,對故障的響應比處理ALERT/的響應要快得多。
設計三的權衡
如果您有增強的 POL,則可以進行權衡。如果故障邏輯對于共享故障/線路來說太復雜,只需添加一個控制器。如果故障邏輯很簡單,則可以使用工具配置故障行為,而無需控制器。或者,您可以使用控制器進行遙測和其他功能,但使用 FAULT/ 引腳進行故障處理,如果您發現它無法處理所有情況,您可以隨時添加用于故障處理的代碼并進行更改。
控制引腳也有類似的權衡。您也可以使用 PMBus 來代替它。在這種情況下,CONTROL引腳仍會保持導通狀態,直到所有POL完成復位。
當控制引腳和故障引腳共享時,最大的靈活性,并且PMBus有一個控制器。通過這種設計, PCB制造后具有完全的靈活性.
電源良好
如果你沒有注意到,我沒有使用電源好。在打開另一個軌道之前,您不需要知道一條軌道何時良好。如果一個軌道都由TON_DELAY控制,而a沒有及時準備好,就會出現故障。PMBus 定義了TON_MAX_FAULT_LIMIT,它定義了鋼軌必須爬坡并在公差范圍內的時間。如果此時某個導軌不在規格范圍內,則會發生故障,這將阻止其他導軌打開。
設計原則是:沒有消息就是好消息。如果系統需要知道所有電源軌何時啟動,您只需要一個簡單的計時器,設置為所有TON_DELAYs定義的最長時間。或者,控制器可以對最后一個 POL 的狀態等進行 PMBus 查詢。
在某些器件中,故障/引腳可以重新配置為電源良好引腳。這允許您在確實需要時擁有電源良好,但故障共享引腳丟失。因此,您可能需要控制器來響應警報/。或者在更簡單的系統中,ALERT/可以抓住控制引腳并在出現故障時關閉所有電源軌。
在實踐中,電源良好通常不是必需的。但是,如果您真的想要一個,您通常可以重新配置 FAULT/。畢竟,總有特殊情況。也許總有空間容納“通用適配器套件”。
審核編輯:郭婷
-
電源
+關注
關注
184文章
17836瀏覽量
251784 -
控制器
+關注
關注
112文章
16445瀏覽量
179444 -
總線
+關注
關注
10文章
2903瀏覽量
88387
發布評論請先 登錄
相關推薦
超聲設計考慮及靈活性實現
實現汽車測功器應用的靈活性
多軌電源設計的排序
EVAL-PRAOPAMP-2RMZ,為不同的應用電路和配置提供多種選擇和廣泛的靈活性
EVAL-PRAOPAMP-4RZ,為不同的應用電路和配置提供多種選擇和廣泛的靈活性
嵌入式Linux的靈活性
集成與靈活性是通往最佳電源管理架構之路
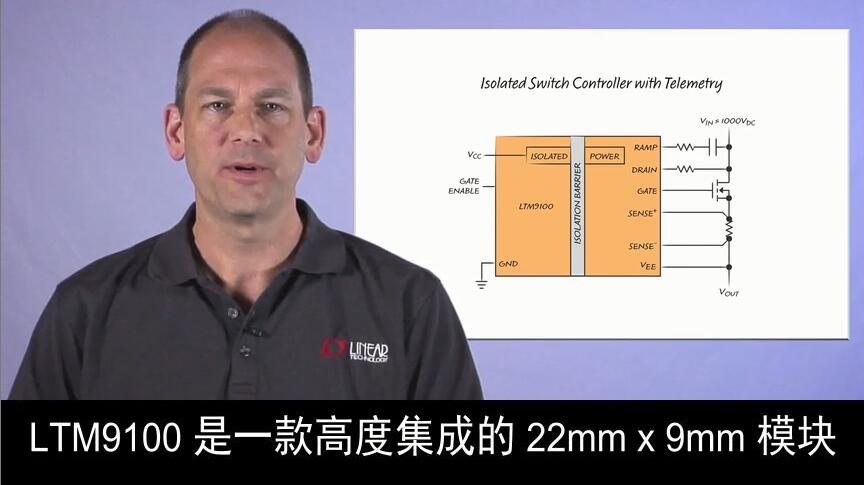
介紹 LTM9100 的特性及靈活性
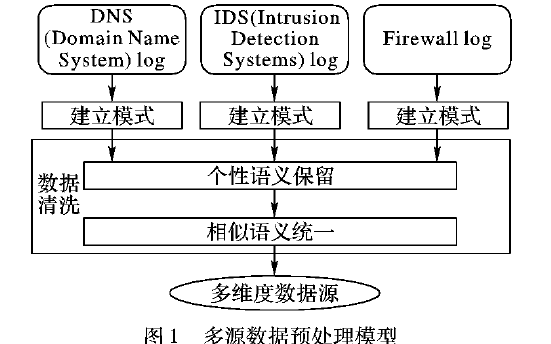
如何解決多源數據融合分析過程靈活性差和處理效率低的問題方法說明





 工商網監
工商網監
評論