") 基于單層超構(gòu)表面的單次曝光三維(3D)成像
基于單層超構(gòu)表面的單次曝光三維(3D)成像
三維(3D)成像是一種用于光檢測、自動駕駛汽車、手勢識別、機(jī)器視覺和其他應(yīng)用的關(guān)鍵信息獲取技術(shù)。超構(gòu)表面(Metasurface)作為一種亞波長尺度的二維陣列,具有豐富的設(shè)計自由度,可以靈活控制光學(xué)波前。超構(gòu)表面具有較大的視場(FOV)和強(qiáng)大的功能,在光學(xué)器件方面具有廣闊的應(yīng)用前景。
據(jù)麥姆斯咨詢報道,近日,北京理工大學(xué)和中國科學(xué)院物理研究所的研究人員組成的團(tuán)隊在Nature Communications期刊上發(fā)表了題為“Single-shot 3D imaging with point cloud projection based on metadevice”的論文,提出了一種基于單層超構(gòu)表面的平面光學(xué)器件,以在傅里葉空間中投影編碼點云,并探索了一種復(fù)雜的匹配算法來實現(xiàn)3D重建,為單次曝光(Single-shot)3D成像提供了完整的技術(shù)路線圖。
本文提出的方法降低了當(dāng)前光學(xué)成像解決方案的對準(zhǔn)復(fù)雜性、振動敏感性和制造復(fù)雜性。
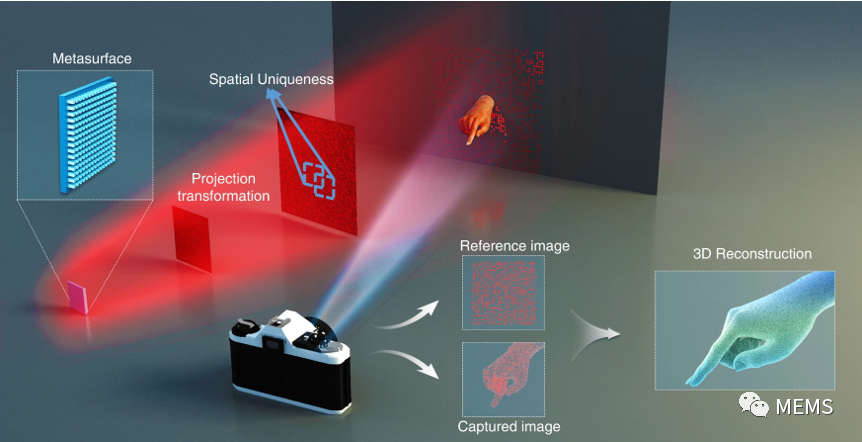
圖1 基于超構(gòu)表面投影的單次曝光3D成像示意圖
3D成像可以感知真實世界的3D物體,并重建空間信息的詳細(xì)特征。由于3D成像的數(shù)字化描述能力,其在人工智能(AI)、虛擬現(xiàn)實(VR)、增強(qiáng)現(xiàn)實(AR)、機(jī)器人導(dǎo)航、文物保護(hù)以及工業(yè)設(shè)計和檢測等眾多應(yīng)用中發(fā)揮著關(guān)鍵作用。近年來,結(jié)構(gòu)光技術(shù)在科學(xué)界和工業(yè)界得到了迅速發(fā)展,在表面測量、快速中短距離測量和高精度方面具有出色的表現(xiàn)。
然而,由于折射透鏡的存在,傳統(tǒng)投影設(shè)備的尺寸受到限制,更多的組件給精確的3D成像系統(tǒng)構(gòu)建帶來了更多困難,這導(dǎo)致了實現(xiàn)緊湊型設(shè)備的技術(shù)和制造挑戰(zhàn)。由于其像素尺寸比光波長大,因此衍射光學(xué)元件(DOE)只能在相對較小的視場內(nèi)生成點云。同時,不同平臺的3D重建算法需要根據(jù)精度、速度和數(shù)據(jù)容量的要求,并結(jié)合相應(yīng)的硬件進(jìn)行嚴(yán)格設(shè)計。因此,對于單次曝光3D成像技術(shù)來說,簡單的設(shè)備和相應(yīng)的重建算法都是必不可少的。
超構(gòu)表面被認(rèn)為是3D超構(gòu)材料的2D等效物,是一種能夠靈活調(diào)制光場的振幅、相位和偏振的人造光學(xué)表面。超構(gòu)表面為全息顯示、保形光學(xué)和光束整形等眾多應(yīng)用提供了新穎的平臺,具有微型化尺寸、大數(shù)值孔徑、全空間控制和多功能的特點,加快了其在3D成像技術(shù)中的應(yīng)用。特別是,超構(gòu)透鏡陣列和雙焦點超構(gòu)透鏡已被用于無源3D定位和成像技術(shù),顯示出毫米級、低功耗平臺的巨大潛力。然而,上述基于超構(gòu)透鏡成像的技術(shù)仍存在一些困難,包括有限的視場、景深和圖像分辨率。
研究人員已經(jīng)提出了一些基于與主動3D成像技術(shù)相關(guān)的超構(gòu)表面的器件,并且與受益于亞波長尺寸的DOE相比,它們都具有相對較大的視場。通過優(yōu)化所選衍射級的強(qiáng)度均勻性,一種用于在大角度空間中生成點云的周期性超構(gòu)表面已被研究人員證實,表明其具有偏振復(fù)用優(yōu)勢的潛在空間編碼能力。同時,一種基于超構(gòu)表面的大視場Dammann光柵已被證實可以取代DOE,但它只能提供有限的衍射階數(shù)來擴(kuò)大來自垂直腔面發(fā)射激光器(VCSEL)陣列的準(zhǔn)直激光圖像。因此,將超構(gòu)表面與激光源集成可以大大提高緊湊性和可擴(kuò)展性,為多功能片上光電器件的設(shè)計奠定基礎(chǔ)。
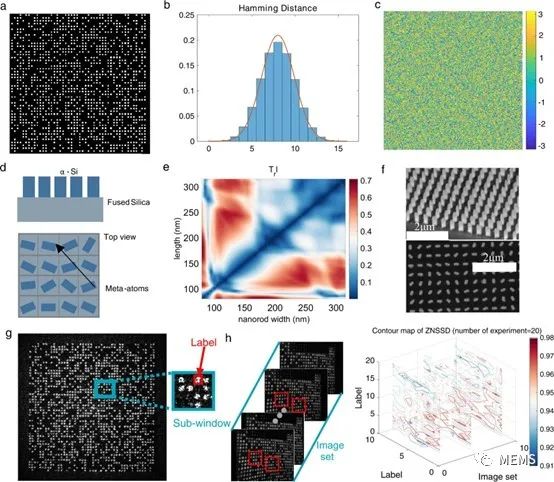
圖2 超構(gòu)表面的設(shè)計、制造和檢測
在這項研究工作中,作者們提出了一種基于單層超構(gòu)表面的平面光學(xué)器件,以在傅里葉空間中投影編碼點云,并探索了一種復(fù)雜的匹配算法來實現(xiàn)3D重建,為單次曝光3D成像提供了完整的技術(shù)路線圖。超構(gòu)表面被用于在傅里葉空間中投影精心設(shè)計的編碼點云,并且他們提出了基于三角測量原理的3D重建操作。
他們討論了用于高性能成像的視場設(shè)計和投影點數(shù)量。他們還提出并分析了一個完整的算法架構(gòu),該架構(gòu)可以有效地實現(xiàn)精確的單次曝光3D重建。通過實驗,他們驗證了本文提出的方法對不同場景的深度精度和3D重建效果,表明了亞毫米測量平臺的可行性。本文提出的方法對于未來消費電子和工業(yè)視覺市場中的平面光學(xué)器件來說是一種有前景的方法;該方法降低了當(dāng)前光學(xué)成像解決方案的對準(zhǔn)復(fù)雜性、振動敏感性和制造復(fù)雜性。
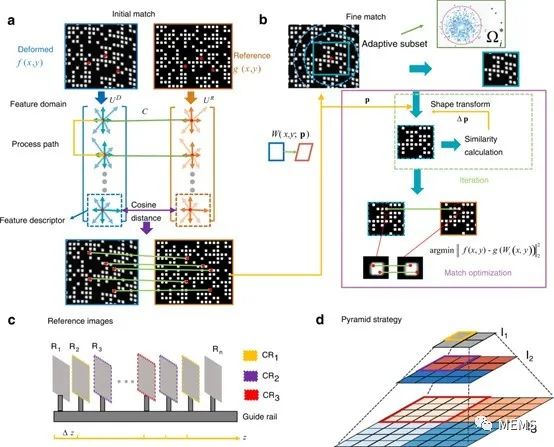
圖3 基于圖像特征的搜索算法與策略
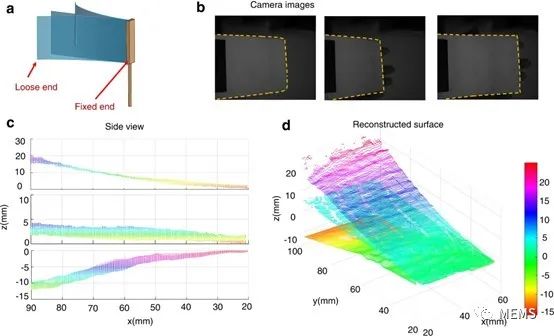
圖4 硬紙板在三種變形狀態(tài)下的3D成像
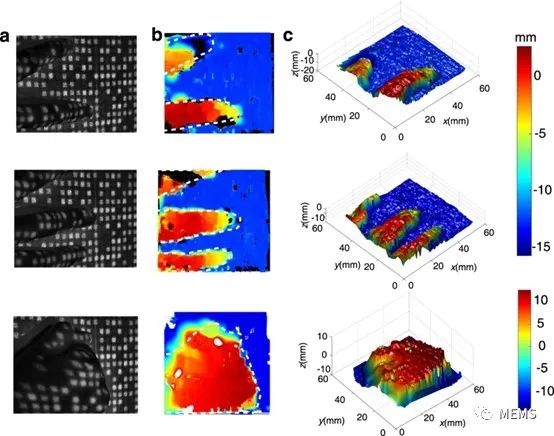
圖5 用于手勢采集的3D成像
綜上所述,研究團(tuán)隊提出并演示了使用精心設(shè)計的超構(gòu)表面作為結(jié)構(gòu)光照明模塊,以減輕裝配困難并實現(xiàn)視場和投影點密度的靈活設(shè)計。他們提出了相應(yīng)的重建策略和算法,并展示了其優(yōu)越的靈活性、魯棒性和通用性。隨著消費電子產(chǎn)品對3D成像技術(shù)的需求日益增長,設(shè)備小型化的需求日益突出,這一進(jìn)展具有重要意義;這項研究的結(jié)果可能會加速計算機(jī)視覺、個人認(rèn)證、光檢測和人工智能等各個領(lǐng)域的應(yīng)用的發(fā)展。
審核編輯:劉清
-
機(jī)器視覺
+關(guān)注
關(guān)注
162文章
4406瀏覽量
120735 -
DOE
+關(guān)注
關(guān)注
0文章
38瀏覽量
13019 -
3D成像
+關(guān)注
關(guān)注
0文章
98瀏覽量
16152 -
FOV
+關(guān)注
關(guān)注
0文章
36瀏覽量
5932
原文標(biāo)題:基于超構(gòu)表面點云投影的單次曝光三維成像
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
三維電子背散射衍射(EBSD)技術(shù):FIB-SEM與EBSD的結(jié)合應(yīng)用案例
3D ToF三維場景距離(景深)測量系統(tǒng)簡介

三維打印技術(shù)原理
基于超構(gòu)表面的單次曝光偏振成像系統(tǒng)設(shè)計

德國蔡司工業(yè)級3D三維掃描儀抄數(shù)機(jī)

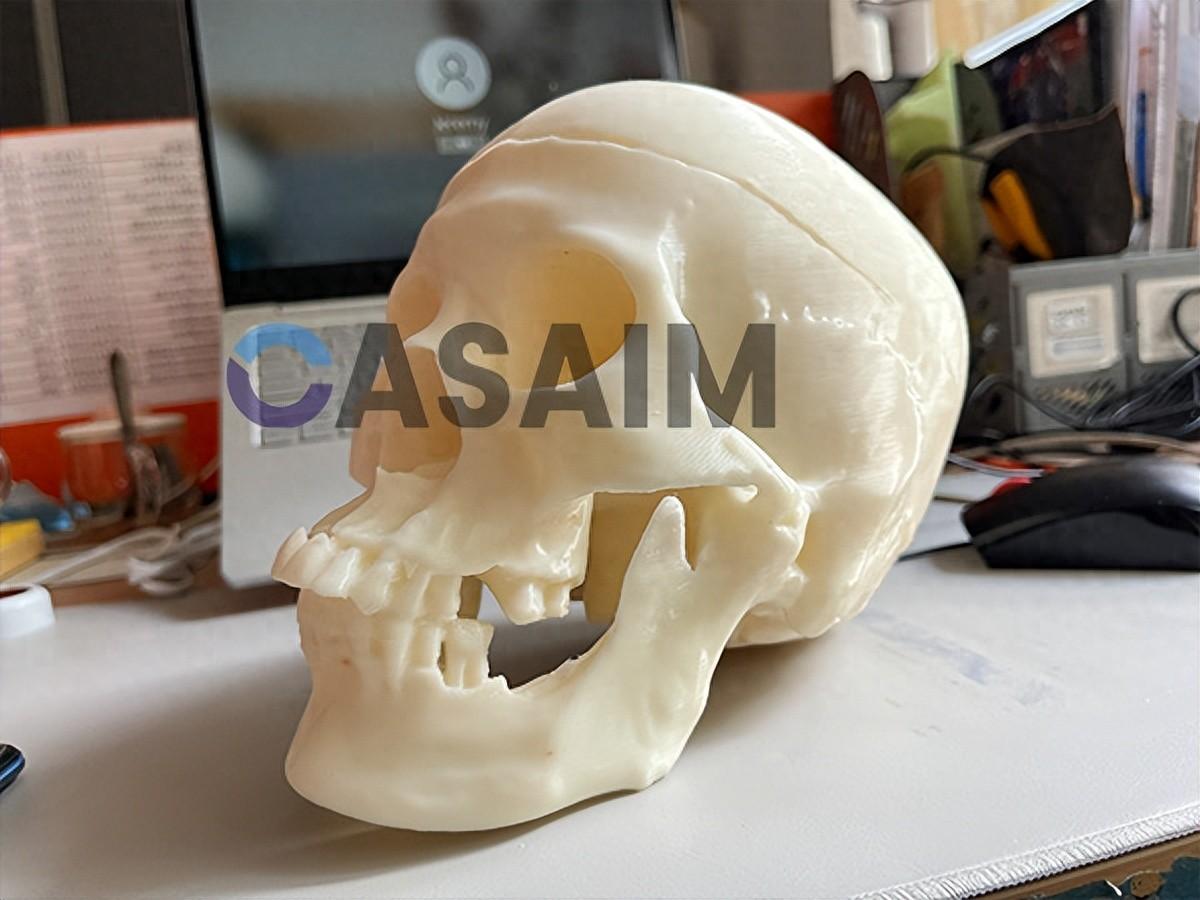
三維掃描與3D打印在法醫(yī)頭骨重建中的突破性應(yīng)用
蔡司3D三維掃描儀激光抄數(shù)設(shè)備
奧比中光與創(chuàng)想三維聯(lián)合打造的高精度3D掃描儀正式發(fā)布
泰來三維|三維掃描助力鞋企提質(zhì)增效



基于三維超球面的聲學(xué)復(fù)眼裝置,可用于全向?qū)拵盘栐鰪?qiáng)

顯微測量|光學(xué)3D表面輪廓儀微納米三維形貌一鍵測量
顯微測量|共聚焦顯微鏡大傾角超清納米三維顯微成像
顯微測量|光學(xué)3D表面輪廓儀微納米三維形貌一鍵測量





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論