 如何設置PMU電壓和電流鉗位
如何設置PMU電壓和電流鉗位
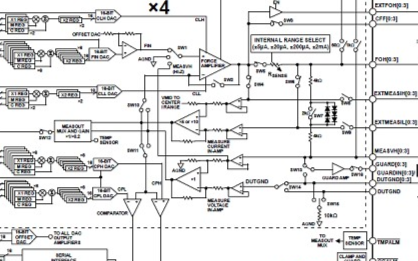
MAX9979是完全集成的引腳電子IC,由DCL、PMU和電平設置器組成。MAX9979的所有模塊均具有箝位、有源負載、高范圍拉電流和灌電流能力、數據反轉和差分模式等特性。MAX9979參數測量單元(PMU)既能施加力,又能測量電流和電壓。設置電壓和電流鉗位可確保PMU在線性區域工作。本應用筆記簡化了對PMU功能的理解并根據應用調整鉗位的過程。
介紹
MAX9979中的參數測量單元(PMU)模塊負責強制和測量電流和電壓。可支持 -1.5V 至 6.5V 的電壓范圍和 ±2μA 至 ±50mA 的滿量程電流范圍。MAX9979的電壓和電流箝位特性使PMU在性能方面更加通用,但需要仔細考慮。
了解 PMU 功能至關重要,因此此應用程序將首先介紹 PMU 模式和操作范圍。然后,將詳細介紹PMU鉗具的使用。
PMU 模式和操作范圍
MAX9979 PMU可配置為六種工作模式,如表1所示。
力-電壓/測量-電壓 (FVMV)
力-電壓/測量-電流 (FVMI)
力-電流/測量-電流 (FIMI)
力-電流/測量-電壓 (FIMV)
無強制/測量電壓 (FNMV)
無強制/無測量 (FNMN)
| Digital Input | Serial Interface Bits | PMU Mode | ||
| LLEAKP | HIZFORCE | FMODE | MMODE | |
| 1 | 1 | X | X | FyMy* |
| 1 | 1 | X | X | FyMy* |
| 1 | 0 | 0 | X | FVMy* (calibration) |
| 1 | 0 | 0 | X | FVMy* (calibration) |
| 1 | 0 | 1 | 0 | FNMN |
| 1 | 0 | 1 | 1 | FNMV (calibration) |
| 1 | 0 | 1 | 1 | FNMV (calibration) |
| 0 | X | X | 0 | FNMN |
| 0 | X | X | 1 | FNMV (calibration) |
| 0 | X | X | 1 | FNMV (calibration) |
| *y = V 或 I | ||||
基于滿量程電流范圍選擇,PMU力-電流和測量-電流可以通過三位控制字(RS2、RS1和RS0)在不同的電流范圍內工作或控制,如表2所示。
| Digital Input | Serial Interface Bits |
PMU Range (IRANGE, RRANGE) |
|||
| LLEAKP | HIZFORCE | RS2 | RS1 | RS0 | |
| X | X | 0 | 0 | 0 | E(±2μA, 500kO) |
| X | X | 0 | 0 | 1 | D(±20μA, 50kO) |
| X | X | 0 | 1 | 0 | C(±200μA, 5kO) |
| X | X | 0 | 1 | 1 | B(±2mA, 500O) |
| X | 0 | 1 | X | X | B* |
| 0 | 1 | 1 | X | X | B* |
| 1 | 1 | 1 | X | X | A(±50mA, 20O) |
| * PMU 高阻抗模式不允許范圍 A 操作 — PMU 默認為范圍 B。 | |||||
PMU 電壓/電流鉗
PMU電壓或電流鉗確保DUT_電壓或電流分別不能超過鉗位電壓或電流。PMU 電壓箝位在 FI 工作模式下可用,而電流箝位在 FV 模式下可用。當PMU電壓/電流箝位處于活動狀態時,在其限值內,MV和MI功能仍然有效。
設置CLAMPHI_和CLAMPLO_數模轉換器(DAC)設置高鉗位電壓(VCLAMPHI) 和低鉗位電壓 (VCLAMPLO)分別。在FI模式下,用戶可以使用CLAMPHI_和CLAMPLO_DAC直接設置電壓箝位。對于電流鉗 IIOSDAC (VIIOS) 需要與 CLAMPHI_ 和CLAMPLO_ DAC 一起設置。鉗位大電流(ICLAMPHI)和鉗位低電流(ICLAMPLO) 方程給出如下。
ICLAMPHI = (VCLAMPHI - VIIOS)/RRANGE
VCLAMPHI = (ICLAMPHI × RRANGE) + VIIOS
示例 1:
考慮 FVMI 模式下的 PMU 和范圍 B 操作。
考慮 VIIOS DAC電壓是2.5V,1K?是 DUT 負載。ICLAMPHI為 2mA 和 ICLAMPLO為-2mA。開始 VIN_從 2V 逐漸降低。公式1和2用于下表3中的計算。
| VIN (V) | VIIOS (V) | ICLAMPHI (mA) | ICLAMPLO (mA) | CLAMPHI DAC Voltage (V) | CLAMPLO DAC Voltage(V) | VDUT (V) | IDUT (mA) | IMOS (uA) |
| 2 | 2.5 | +2 | -2 | 3.5 | 1.5 | 1.86598 | 1.92857 | 71.43 |
| 1.5 | 2.5 | +2 | -2 | 3.5 | 1.5 | 1.4969 | 1.5329 | -32.9 |
| 1 | 2.5 | +2 | -2 | 3.5 | 1.5 | 0.9996 | 1.0299 | -29.9 |
| 0.5 | 2.5 | +2 | -2 | 3.5 | 1.5 | 0.4992 | 0.5012 | -1.2 |
| 0 | 2.5 | +2 | -2 | 3.5 | 1.5 | 0.0082 | 0.0085 | -8.5 |
作為 VIN_ 逐漸減少,VDUT_ 和IDUT也減少。MAX9979 PMU具有測量電流失調(IMOS) 的 ±1 % FSR(如數據手冊的 EC 表所述)。由于PMU處于B工作范圍(FSR = 4mA),因此預期的最大電流失調為±40μA。如果 IDU失調超過 ±40μA,則不需要輸出。在表 3 中,藍綠色讀數是理想的,橙色讀數是不可取的。對于PMU,需要滿足兩個條件。
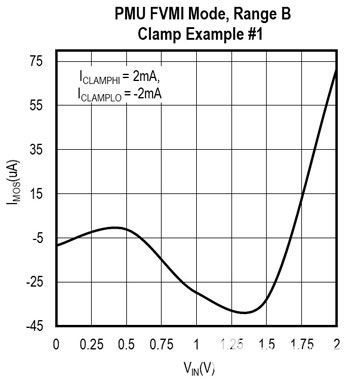
圖1.PMU FVMI 模式,范圍 B 箝位,示例 1。
為了在FI模式下保持線性度:
(VCLAMPLO + 0.5V) = VDUT = (VCLAMPHI – 0.5V)
為了在FV模式下保持線性度:
(ICLAMPLO + 10% FSR) = IDUT = (ICLAMPHI – 10%FSR)
示例 2:
考慮 FVMI 模式下的 PMU 和范圍 B 操作。
FMODE = 0, MMODE = 0, RRANGE = 500?, FSR = 4mA
考慮 VIIOS DAC電壓是2.5V,1K?是DUT_負載。修復 V在_ DAC電壓為1V。將箝位電流從2mA更改為0mA。公式1和2用于下面表4中的計算。
Expected IDUT = VDUT/RLOAD = 1V/1K? = ±1mA
注意:±符號表示MAX9979器件可以供應或吸收電流。
在范圍 B 工作時:10% FSR = 10% 的 4mA = 0.4mA
根據公式 4,假設設備如下:
IDUT = (ICLAMPHI – 10% FSR)
IDUT + 10% FSR = ICLAMPHI
ICLAMPHI = 1mA + 0.4mA = 1.4mA
Similarly, ICLAMPLO = -1.4mA
| VIN (V) | VIIOS (V) | ICLAMPHI (mA) | ICLAMPLO (mA) | CLAMPHI DAC Voltage (V) | CLAMPLO DAC Voltage(V) | VDUT (V) | IDUT (mA) | IMOS (uA) |
| 1 | 2.5 | 2 | -2 | 3.5 | 1.5 | 0.9996 | 1.0299 | 29.9 |
| 1 | 2.5 | 1.5 | -2 | 3.25 | 1.5 | 0.9996 | 1.0299 | 29.9 |
| 1 | 2.5 | 1 | -2 | 3 | 1.5 | 0.8642 | 0.8623 | -137.7 |
| 1 | 2.5 | 0.5 | -2 | 2.75 | 1.5 | 0.4911 | 0.5018 | -498.2 |
| 1 | 2.5 | 0 | -2 | 2.5 | 1.5 | 0.1117 | 0.1155 | -884.5 |
VIN在 1V。在 FVMI 模式下,我們期望 VDUT= 1V。因此IDUT= DUT/RDUT = 1V/1K? = +1mA。在橙色行中觀察,當ICLAMPH小于1.4mA,VDUT和IDUT讀數不是預期值。在這種情況下,IDUT失調誤差大于±40uA。
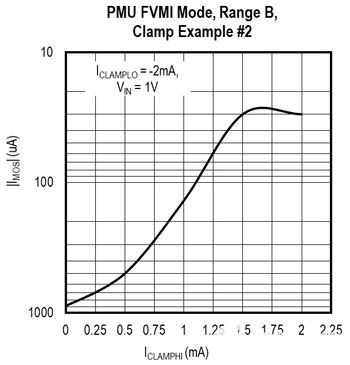
圖2.PMU FVMI 模式,范圍 B 箝位示例 2。
示例 3:
考慮 FVMI 模式下的 PMU 和范圍 B 操作。
FMODE = 0, MMODE = 0, RRANGE = 500?, FSR = 4mA
考慮 VIIOS DAC電壓是2.5V,1K?是DUT_負載。將VIN_DAC電壓固定為1.5V,I夾子作為2mA。更改 ICLAMPLO從-2mA到1.4mA。公式1和2用于下面表5中的計算。
| VIN (V) | VIIOS (V) | ICLAMPHI (mA) | ICLAMPLO (mA) | CLAMPHI DAC Voltage (V) | CLAMPLO DAC Voltage(V) | VDUT (V) | IDUT (mA) | IMOS (uA) |
| 1.5 | 2.5 | 2 | -2 | 3.5 | 1.5 | 1.4912 | 1.5369 | 36.9 |
| 1.5 | 2.5 | 2 | -1 | 3.5 | 2 | 1.4912 | 1.5369 | 36.9 |
| 1.5 | 2.5 | 2 | 0 | 3.5 | 2.5 | 1.4912 | 1.5369 | 36.9 |
| 1.5 | 2.5 | 2 | 1 | 3.5 | 3 | 1.4912 | 1.5369 | 36.9 |
| 1.5 | 2.5 | 2 | 1.2 | 3.5 | 3.1 | 1.4912 | 1.5369 | 36.9 |
| 1.5 | 2.5 | 2 | 1.4 | 3.5 | 3.2 | 1.5174 | 1.5687 | 68.7 |
從等式4,
(ICLAMPLO + 10% FSR) = IDUT = (ICLAMPHI – 10% FSR)
(ICLAMPLO + 10% FSR) = (ICLAMPHI – 10% FSR)
ICLAMPHI – ICLAMPLO = 20% FSR
VCLAMPHI – VCLAMPLO = (20% FSR) × RRANGE;從等式 1 和 2 開始。
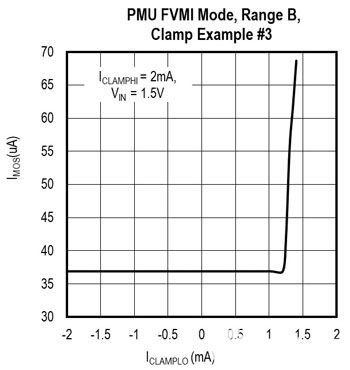
圖3.PMU FVMI 模式,范圍 B 箝位示例 3。
示例 4:
考慮 FIMV 模式下的 PMU 和范圍 B 操作。
FMODE = 1, MMODE = 1, R范圍= 500?, FSR = 4mA
考慮 VIIOS DAC電壓是2.5V,1K?是DUT_負載。修復VIN DAC電壓為5.5V。將箝位電壓從 ±2.5V 更改為 ±1.5V。
當PMU處于FI模式時,電壓箝位就會出現。從等式3,
(VCLAMPLO + 0.5V) = VDUT = (VCLAMPHI – 0.5V).
在FI模式出DUT的電流按照下面的公式5計算。
DUT = (VIN – VIIOS)/(4 × RRANGE)
其中;
IDUT = (5.5 – 2.5)/(4 × 500)
IDUT = 1.5mA
VDUT = IDUT × RLOAD = 1.5mA × 1K? = 1.5V
| VIN (V) | VIIOS (V) | VCLAMPHI (V) | VCLAMPLO (V) | VDUT (V) | IDUT (mA) | VMOS (uA) |
| 5.5 | 2.5 | 2.5 | -2.5 | 1.487 | 1.498 | -13 |
| 5.5 | 2.5 | 2 | -2 | 1.487 | 1.498 | -13 |
| 5.5 | 2.5 | 1.5 | -1.5 | 1.393 | 1.441 | -107 |
預期的DUT電壓為1.5V,箝位電壓應比預期的DUT電壓高0.5V。當箝位電壓與DUT電壓相同時,DUT電壓開始降低(參見圖表中的橙色行)。電壓偏移的測量(VMOS) 增加超過 25mV。
總結
本應用筆記為用戶提供了在線性區域操作PMU的指南。這很簡單,有兩個等式:
(VCLAMPLO + 0.5V) = VDUT = (VCLAMPHI – 0.5V)
To maintain linearity in FV mode:
(ICLAMPLO + 10% FSR) = IDUT = (ICLAMPHI – 10% FSR)
審核編輯:郭婷
-
轉換器
+關注
關注
27文章
8743瀏覽量
148034 -
dac
+關注
關注
43文章
2309瀏覽量
191562 -
PMU
+關注
關注
1文章
109瀏覽量
21695
發布評論請先 登錄
相關推薦
有源鉗位技術解析
什么是米勒鉗位?為什么碳化硅MOSFET特別需要米勒鉗位?
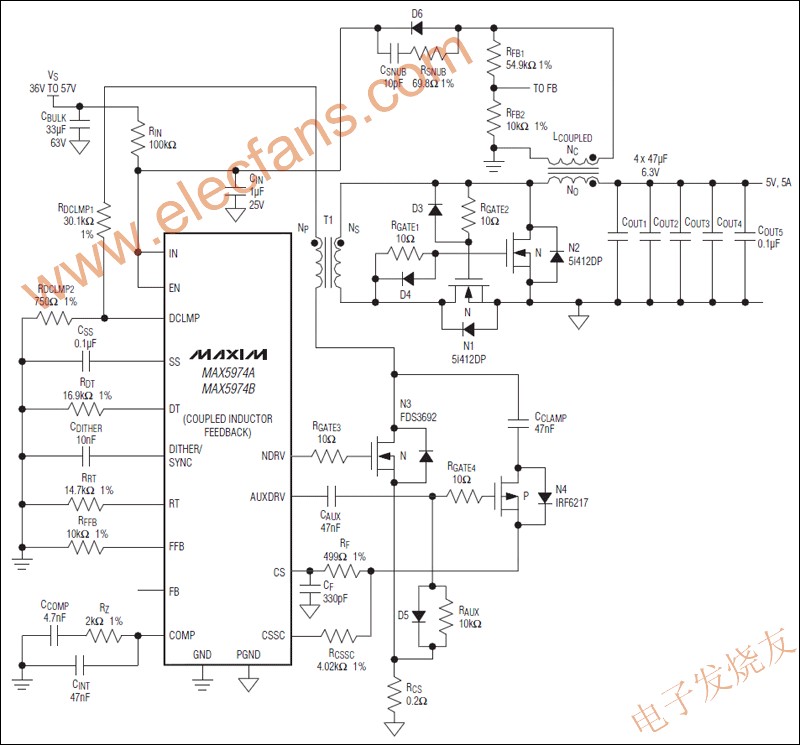
MAX5974寬輸入電壓范圍、有源鉗位、電流模式PWM控制器
基于ADI AD522集成16位單元方案設置DAC四參數測量
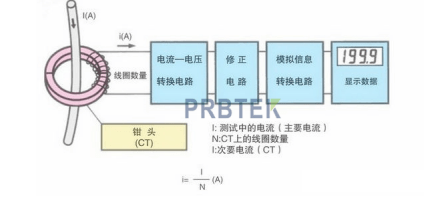
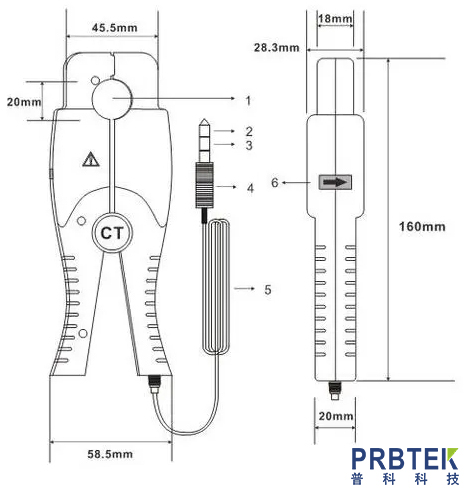
鉗形電流表與電流鉗測試電流的原理






 工商網監
工商網監
評論