") 使用 OpenVINO? 工具包進(jìn)行停車場監(jiān)控
使用 OpenVINO? 工具包進(jìn)行停車場監(jiān)控
使用數(shù)碼相機(jī)進(jìn)行視頻監(jiān)控是一種不斷增長的趨勢,其中一些趨勢是由物聯(lián)網(wǎng) (IoT) 的發(fā)展所推動的。2016 年,全球估計(jì)有 3.5 億個監(jiān)控?cái)z像頭在運(yùn)行,其中約 65% 在亞洲運(yùn)行。
但是,當(dāng)在畫面中檢測到運(yùn)動時,這些攝像頭不僅僅可以被動地錄制視頻。該視頻還可以實(shí)時用于分析。在此博客中,我們將探討如何使用英特爾? OpenVINO ?工具包的停車場監(jiān)視器應(yīng)用程序根據(jù)進(jìn)出停車場的車輛自動識別可用停車位。
停車場監(jiān)控?cái)?shù)據(jù)管道
在過去的博文中,我們探索了使用攝像頭圖像進(jìn)行人臉和表情檢測的應(yīng)用。在此應(yīng)用程序中,我們將探索深度學(xué)習(xí)的不同用途,以根據(jù)方向跟蹤車輛并確定它們是進(jìn)入停車場還是離開停車場。
圖 1顯示了停車場車輛跟蹤管道。讓我們仔細(xì)看看這個深度學(xué)習(xí)應(yīng)用程序中發(fā)生了什么。
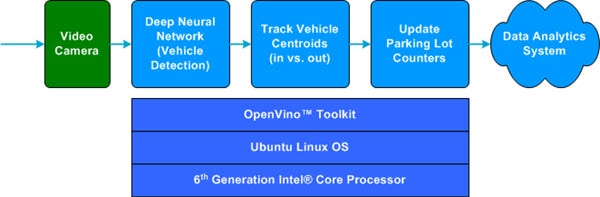
圖 1:停車場車輛跟蹤流水線圖說明了 OpenVINO ?工具包的這個應(yīng)用程序如何從捕獲的圖像執(zhí)行車輛檢測,然后計(jì)算質(zhì)心(檢測到的車輛的移動)以確定車輛的進(jìn)出。(來源:作者)
該應(yīng)用程序使用安裝在停車場入口和出口上方的攝像機(jī)捕獲的圖像進(jìn)行操作。從捕獲的圖像中,深度神經(jīng)網(wǎng)絡(luò)使用針對車輛識別訓(xùn)練和優(yōu)化的卷積神經(jīng)網(wǎng)絡(luò) (CNN) 識別畫面中的車輛。CNN 是一種流行的深度神經(jīng)網(wǎng)絡(luò),通常用于處理圖像。CNN 識別捕獲幀中的車輛,然后使用車輛矩形計(jì)算質(zhì)心來表示車輛。然后存儲這些質(zhì)心。當(dāng)捕獲新幀并檢測到車輛時,將根據(jù)舊質(zhì)心檢查新質(zhì)心,并且最近的舊質(zhì)心指示車輛(考慮到檢測速度高而車輛速度慢)。然后這兩個樣本可以指示車輛行駛的方向,
圖 2顯示了這個深度神經(jīng)網(wǎng)絡(luò)的結(jié)果。請注意,圖像中的綠色疊加層是汽車質(zhì)心及其坐標(biāo)(用于跟蹤和關(guān)聯(lián))。

圖 2:停車場計(jì)數(shù)器輸出屏幕將質(zhì)心顯示為綠色圓圈,以確定車輛是進(jìn)入還是離開停車場。(來源:英特爾)
示例應(yīng)用程序還說明了消息隊(duì)列遙測傳輸 (MQTT) 協(xié)議的使用,該協(xié)議將停車場信息傳送到數(shù)據(jù)分析系統(tǒng)。
為什么這很酷
此應(yīng)用程序是使用英特爾? OpenVINO? 分發(fā)版和約 800 行 Go(或 700 行 C++)開發(fā)的。這個應(yīng)用程序的復(fù)雜部分是通過預(yù)訓(xùn)練的深度神經(jīng)網(wǎng)絡(luò)執(zhí)行的,它伴隨著一些膠水代碼,這些膠水代碼實(shí)現(xiàn)了車輛跟蹤和幀之間相關(guān)性的簡單計(jì)算(通過跟蹤代表車輛的質(zhì)心)。根據(jù)檢測到的矩形大小,應(yīng)用程序可以丟棄對象(例如漫游到框架中的行人)。與功能強(qiáng)大的硬件配對時,例如基于第 6代英特爾?酷睿?處理器或英特爾神經(jīng)計(jì)算棒 2 的硬件由 Intel Movidius? X VPU 提供支持,可以獲得令人印象深刻的推理速度,從而實(shí)現(xiàn)實(shí)時分析。
改編這個例子
應(yīng)用程序存在許多用例,可以識別捕獲的幀中的車輛,然后跟蹤它們。考慮這樣一種情況,道路安全工程師在麻煩的十字路口跟蹤車輛以尋找潛在問題(例如車輛不遵守停車標(biāo)志,或在盲點(diǎn)十字路口發(fā)生未遂事故)。道路安全工程師可以使用此應(yīng)用程序收集的統(tǒng)計(jì)數(shù)據(jù)(質(zhì)心位置和通過十字路口的速度)來提出更改建議(例如安裝燈或額外的停車標(biāo)志)。
另一個用途是跟蹤特定區(qū)域中站立的人數(shù)。安裝在人行橫道上方或電梯外的攝像頭可以幫助確定何時換燈——例如,如果交通暢通,道路安全工程師可以優(yōu)化行人的交通流量——或者換到哪個樓層作為一種方式優(yōu)化進(jìn)出建筑物的人流。
在哪里了解更多
您可以在英特爾?物聯(lián)網(wǎng)開發(fā)套件GitHub 上了解有關(guān)此演示的更多信息。
膠水應(yīng)用程序是用 C++ 和 Go 語言開發(fā)的。該發(fā)行版包括針對 OpenVINO ?的英特爾?優(yōu)化車輛和行人檢測模型。您可以使用 Ubuntu 16.04 LTS Linux 操作系統(tǒng)、Intel ? OpenVINO ?工具包分發(fā)版和 OpenCL ?運(yùn)行時包輕松試驗(yàn)此應(yīng)用程序。
您還可以使用 AIoT 開發(fā)套件快速啟動您的開發(fā),其中包括 Ubuntu、OpenVINO ?、英特爾? Media SDK 和預(yù)裝英特爾?酷睿?處理器的英特爾? System Studio 2018。開發(fā)工具包包括幫助您快速入門和運(yùn)行的教程。
您還可以使用基于 Intel ? Apollo Lake ?平臺的AAEON UP 板。
審核編輯hhy
-
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7145瀏覽量
89591 -
監(jiān)控
+關(guān)注
關(guān)注
6文章
2235瀏覽量
55368 -
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2914文章
44939瀏覽量
377094
發(fā)布評論請先 登錄
相關(guān)推薦
停車場空位引導(dǎo)系統(tǒng)介紹
停車場尋車?yán)щy、排隊(duì)繳費(fèi)繁瑣,藍(lán)牙AOA助力打造智慧停車場
基于無線傳感技術(shù)的停車場誘導(dǎo)系統(tǒng)解決方案
停車場反向?qū)ぼ囅到y(tǒng)功能有哪些

地下停車場車輛反向?qū)ぼ噷?dǎo)航方案介紹
淺談智慧停車 停車場 智慧停車場方案

智慧停車場可視化數(shù)據(jù)大屏,數(shù)字孿生城市停車
4G工業(yè)路由器賦能智能停車場遠(yuǎn)程監(jiān)控管理

雷達(dá)智組網(wǎng)照明:德賽大廈停車場的創(chuàng)新之選

局域網(wǎng)語音對講系統(tǒng)_IP廣播對講系統(tǒng)停車場解決方案
局域網(wǎng)語音對講系統(tǒng)_IP廣播對講系統(tǒng)停車場解決方案
智能停車場物聯(lián)網(wǎng)遠(yuǎn)程監(jiān)控解決方案
緩解停車難!兆越智慧停車場管理系統(tǒng)讓停車更“智慧”

智能停車場引導(dǎo)與道閘系統(tǒng)設(shè)計(jì)的關(guān)鍵考量
lora智慧停車場通過聯(lián)網(wǎng)共享數(shù)據(jù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論